一种基于汽车360度全景标定设计方法与流程
本发明涉及汽车,尤其涉及一种基于汽车360度全景标定设计方法。
背景技术:
1、随着生活水平的提高,汽车的普及率越来越高,汽车的驾驶体验,舒适度及安全性、智能驾驶辅助功能越来越受重视。360全景系统作为一种汽车驾驶辅助技术,逐渐成为汽车的标配功能。这种技术可以让驾驶员轻松掌握汽车周边的情况,有效减少刮蹭、碰撞、陷落等事故,全景标定是360全景系统最为关键的技术之一,现有全景标定一般通过手动标定。
2、但是在手动标定中,人工参与特征点的选择和匹配,操作复杂且容易出错,无法满足现代汽车对安全性和可靠性的要求。
技术实现思路
1、本发明的目的在于提供一种基于汽车360度全景标定设计方法,旨在解决现有在手动标定中,人工参与特征点的选择和匹配,操作复杂且容易出错,无法满足现代汽车对安全性和可靠性的要求的技术问题。
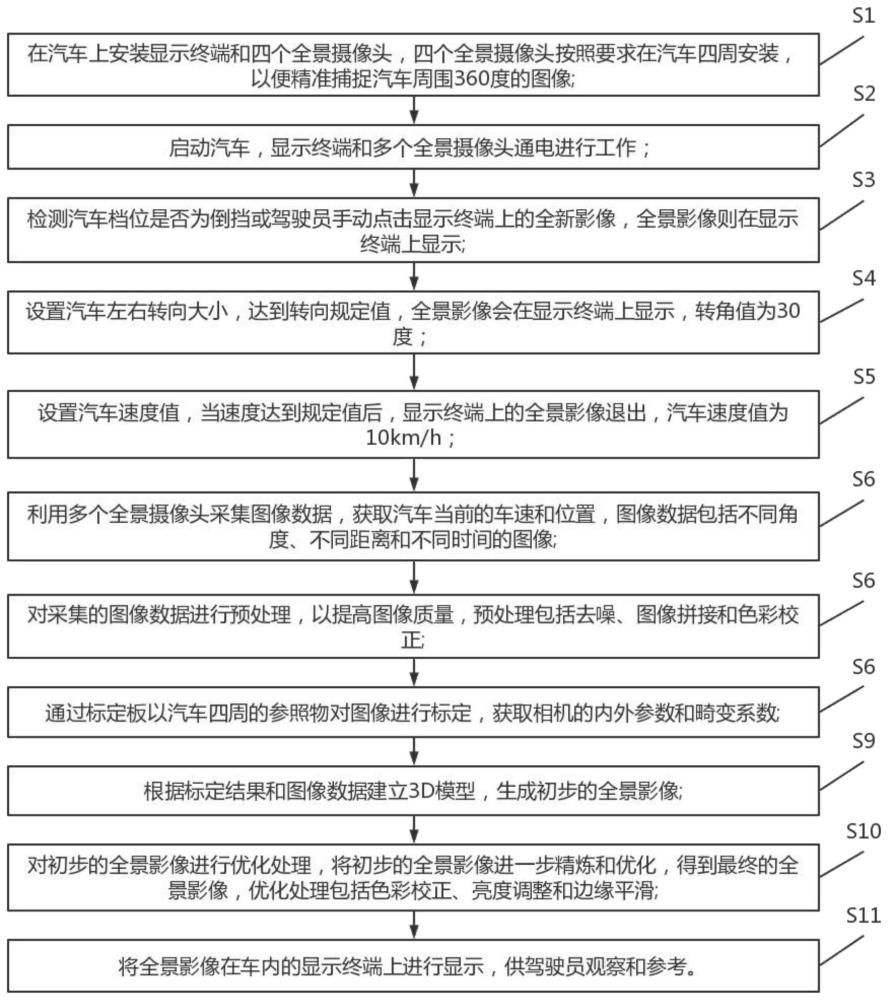
2、为实现上述目的,本发明采用的一种基于汽车360度全景标定设计方法,包括如下步骤:
3、在汽车上安装显示终端和四个全景摄像头;
4、启动汽车,显示终端和多个全景摄像头通电进行工作;
5、检测汽车档位是否为倒挡或驾驶员手动点击显示终端上的全新影像,全景影像则在显示终端上显示;
6、设置汽车左右转向大小,达到转向规定值,全景影像会在显示终端上显示;
7、设置汽车速度值,当速度达到规定值后,显示终端上的全景影像退出;
8、利用多个全景摄像头采集图像数据,获取汽车当前的车速和位置;
9、对采集的图像数据进行预处理,以提高图像质量;
10、通过标定板以汽车四周的参照物对图像进行标定,获取相机的内外参数和畸变系数;
11、根据标定结果和图像数据建立3d模型,生成初步的全景影像;
12、对初步的全景影像进行优化处理,将初步的全景影像进一步精炼和优化,得到最终的全景影像;
13、将全景影像在车内的显示终端上进行显示,供驾驶员观察和参考。
14、其中,在汽车上安装显示终端和四个全景摄像头的步骤中:
15、四个全景摄像头按照要求在汽车四周安装,以便精准捕捉汽车周围360度的图像。
16、其中,在设置汽车左右转向大小,达到转向规定值,全景影像会在显示终端上显示的步骤中:
17、转角值为30~90度。
18、其中,在设置汽车速度值,当速度达到规定值后,显示终端上的全景影像退出的步骤中:
19、车速度值为10~30km/h。
20、其中,在利用多个全景摄像头采集图像数据,获取汽车当前的车速和位置的步骤中:
21、图像数据包括不同角度、不同距离和不同时间的图像。
22、其中,在对采集的图像数据进行预处理,以提高图像质量的步骤中:
23、预处理包括去噪、图像拼接和色彩校正。
24、其中,在对初步的全景影像进行精炼和优化,得到最终的全景影像的步骤中:
25、优化处理包括色彩校正、亮度调整和边缘平滑。
26、本发明的一种基于汽车360度全景标定设计方法,在汽车上安装显示终端和四个全景摄像头,启动汽车,显示终端和多个全景摄像头通电进行工作,通过检测汽车档位是否为倒挡或驾驶员手动点击显示终端上的全新影像,以及设置汽车左右转向大小,达到转向规定值,全景影像会在显示终端上显示,通过设置汽车速度值,当速度达到规定值后,显示终端上的全景影像退出,利用多个全景摄像头采集图像数据,获取汽车当前的车速和位置,首先对采集的图像数据进行预处理,以提高图像质量,然后通过标定板以汽车四周的参照物对图像进行标定,获取相机的内外参数和畸变系数,再根据标定结果和图像数据建立3d模型,生成初步的全景影像,然后对初步的全景影像进行优化处理,将初步的全景影像进一步精炼和优化,得到最终的全景影像,最后将全景影像在车内的显示终端上进行显示,供驾驶员观察和参考,实现了能够自动进行标定,操作方便且不容易出错,提高了精度,能够满足现代汽车对安全性和可靠性的要求。
技术特征:
1.一种基于汽车360度全景标定设计方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于汽车360度全景标定设计方法,其特征在于,在汽车上安装显示终端和四个全景摄像头的步骤中:
3.如权利要求1所述的基于汽车360度全景标定设计方法,其特征在于,在设置汽车左右转向大小,达到转向规定值,全景影像会在显示终端上显示的步骤中:
4.如权利要求1所述的基于汽车360度全景标定设计方法,其特征在于,在设置汽车速度值,当速度达到规定值后,显示终端上的全景影像退出的步骤中:
5.如权利要求1所述的基于汽车360度全景标定设计方法,其特征在于,在利用多个全景摄像头采集图像数据,获取汽车当前的车速和位置的步骤中:
6.如权利要求1所述的基于汽车360度全景标定设计方法,其特征在于,在对采集的图像数据进行预处理,以提高图像质量的步骤中:
7.如权利要求1所述的基于汽车360度全景标定设计方法,其特征在于,在对初步的全景影像进行精炼和优化,得到最终的全景影像的步骤中:
技术总结
本发明涉及汽车技术领域,具体涉及一种基于汽车360度全景标定设计方法;利用多个全景摄像头采集图像数据,获取汽车当前的车速和位置,首先对采集的图像数据进行预处理,以提高图像质量,然后通过标定板以汽车四周的参照物对图像进行标定,获取相机的内外参数和畸变系数,再根据标定结果和图像数据建立3D模型,生成初步的全景影像,然后对初步的全景影像进行优化处理,将初步的全景影像进一步精炼和优化,得到最终的全景影像,最后将全景影像在车内的显示终端上进行显示,供驾驶员观察和参考,通过上述方式,实现了能够自动进行标定,操作方便且不容易出错,提高了精度,能够满足现代汽车对安全性和可靠性的要求。
技术研发人员:甘茂煌
受保护的技术使用者:深圳市蓝鲸智联科技股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!