一种动态模糊柔性作业车间调度方法、介质和系统
本发明涉及一种动态模糊柔性作业车间调度方法、介质和系统,属于车间调度。
背景技术:
1、调度在各种制造业、操作流程和运输业中发挥着极其重要的作用,其目的是将任务有效地分配给有限的资源。作业车间调度问题(job shop scheduling problem,jsp)是一个经典的调度问题,它涉及确定一组作业在不同机器上的最优调度方案。由于jsp在特定制造场景中的相关性,它已被广泛研究。然而,随着调度问题变得越来越复杂,研究人员对jsp进行了扩展,以应对更多的挑战,从而出现了柔性作业车间调度问题(flexiblejobshop scheduling problem,fjsp)。fjsp的特点是加工路线的灵活性,使生产系统具有更大的通用性和适应性。因此,fjsp在半导体制造、汽车装配工艺和装备制造等多个制造领域得到了广泛应用。与经典的jsp相比,fjsp由于其灵活的机器分配而表现出额外的复杂性,使其也成为np-hard问题。np-hard意味着寻找fjsp的最优解需要指数级的时间复杂度,这对开发高效算法提出了巨大挑战。
2、迄今为止,大多数现有研究中的经典柔性作业车间调度问题假定整个调度过程保持在理想状态,即静态稳定的环境中。然而,当今复杂的工业场景给柔性制造带来了巨大挑战。在制造过程中,机器故障、新工作插入、旧工作取消、订单修改等不可预测因素不可避免。因此,有必要在两个方面对经典的fjsp进行扩展,即:1)将处理时间定义为时间间隔而不是确定值;2)将上述动态中断纳入静态调度。一方面,模糊逻辑系统已被应用到各种调度布局中,以抵消不确定因素的影响。具体来说,操作的处理时间通常表示为一个范围内的波动,即三角模糊数或梯形模糊数。
3、面对日益严重的碳排放问题,绿色制造已经引起了人们的高度重视,迫切需要寻求高效节能的方法。三种常见的节能方法是开/关机制、处理速度调整和离峰策略。开/关机机制和非峰值策略都是通过在用电高峰或机器空闲时关闭机器,在需要时开启机器来实现节能的。然而,在一些连续调度问题中,如连铸,机器必须保持待机模式以处理订单插入等动态事件。因此,在动态制造系统中考虑加工速度的可变调整具有重要意义。
4、以克隆选择原理为特征的多目标免疫算法(multi-objective immunealgorithm,moia)表现出卓越的性能。具体来说,选择一小部分具有较高亲和力的个体来产生多个克隆。然后,克隆通过超突变进化,以保持种群的多样性和收敛能力。然而,元启发式算法由于对参数设置的敏感性,往往表现出较低的鲁棒性。相比之下,强化学习(reinforcement learning,rl)通过奖励学习机制与复杂环境相互作用,指导后续行动的选择并建立奖励-行动映射,从而增强了适应能力。该领域的研究表明,在求解组合优化问题(combinatorial optimization problems,cops)时,将rl与元启发式算法相结合,有可能超越传统的元启发式方法,如单一元启发式或混合元启发式。
5、发明人发现,现有的解决柔性作业车间调度问题的方法中存在以下的局限性:(1)很少有研究同时考虑模糊加工时间以及动态事件这两个不确定特征;(2)很少有研究将模糊逻辑纳入动态调度模型中;(3)目前还没有将多目标免疫算法与rl算法的特点相结合来解决调度问题的案例。
技术实现思路
1、本发明要解决的技术问题是提供一种动态模糊柔性作业车间调度方法、介质和系统,用以解决上述技术问题。
2、第一方面,本技术提供了一种处理不确定干扰的基于预测-反应的动态模糊柔性作业车间调度模型,具体包括:
3、根据作业车间相关信息,建立基于预测-反应的动态模糊柔性作业车间调度模型,考虑两类动态事件,即新工件插入以及机床故障,分别对应三种重调度策略及一种鲁邦重调度去求解,具体包括为:
4、重组重调度策略(rs-1):当有新工作到达时,保持之前的调度方案不变,新到达的工序被添加到调度的末尾进行处理,并选择适当的机床进行加工;
5、完全重调度策略(rs-2):完全重新调度是指根据机器的最早可用时间,重新调度之前调度方案中未完成的操作以及新到达的操作;
6、插入重调度策略(rs-3):插入重新调之间的时间间隔,类似于上述实时重新调度,工作到来时,原始调度方案保持不变,新到达的工序按顺序插入时间间隔中;
7、鲁邦重调度策略:延长工件的完工时间使其能够完全响应机器故障的时间;
8、根据四种重调度策略,对所述生产调度模型进行优化求解,得到车间最优生产方案;基于车间最优生产方案对车间内的工件执行调度。
9、第二方面,本发明提供了一种动态模糊柔性作业车间调度方法,即基于q学习的进化免疫,具体包括:
10、获取动态模糊柔性作业车间的车间数据;所述车间数据包括待加工工件的数量、待加工工件要求完成时间、待加工工件的工序数量、工序的加工时间以及启动时间;
11、根据车间数据建立约束条件,所述约束条件包括动态事件、模糊时间以及机床加工速度约束;
12、根据约束条件建立基于动态柔性作业车间的生产调度模型;生产调度模型的目标为最小化车间中模糊完工时间,模糊加工能耗以及最大化满意度指数;
13、对所述生产调度模型进行优化求解,得到车间最优生产方案。
14、进一步的,对所述生产调度模型进行优化求解,得到车间最优生产方案,具体包括:
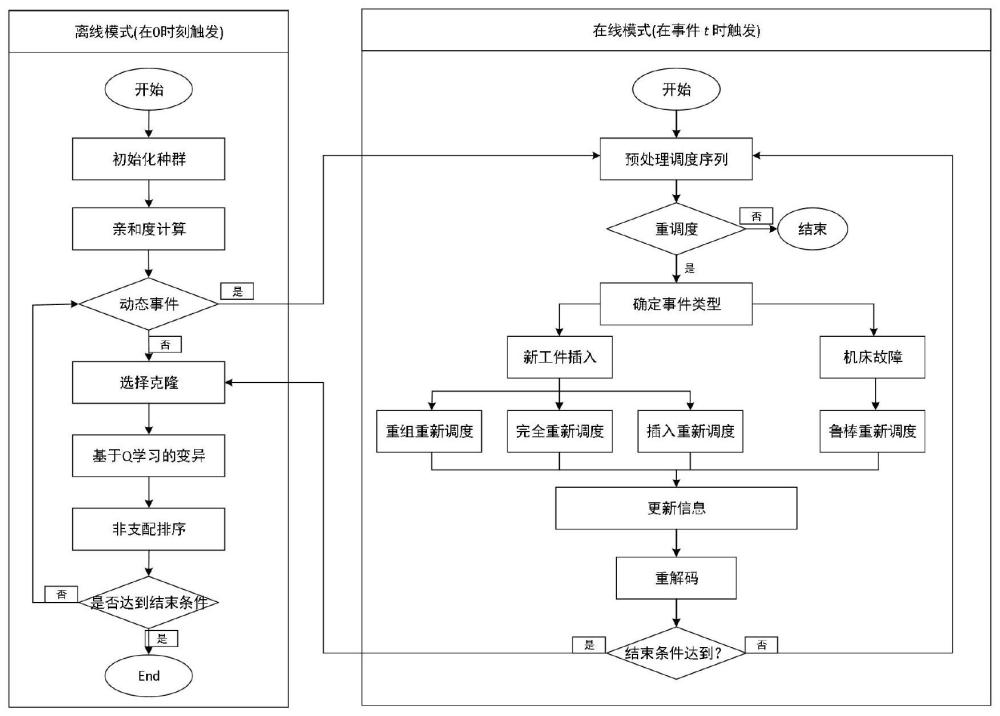
15、s1:初始化种群:采用三维向量表示编码方式并且采用了合作的初始化机制来初始化原始个体和重新安排后的个体,其中针对不同的向量分别采用了不同的初始化启发式方法生成psize个解;
16、s2:采用动态解码策略计算每个种群中每个个体的目标值;
17、s3:选择适应度较好的个体进行克隆,为进一步的免疫算子做准备;
18、s5:判断是否有动态事件发生;如果是,则进入s7;如果否,则进入s8;
19、s6:对于事件发生,首先进行预调度确定在事件发生时已经完成的工序以及未完工的工序集合,然后采用四种重调度策略对当前的事件(新工件插入或者机床故障)进行重调度,然后更新调度之后的及工件以及机床信息,然后重新解码获得当前个体的适应度值;
20、s7:对于克隆的个体进行基于q学习的超变异,首先识别每个个体在q表中的当前状态st以及当前迭代的epsilon值,根据该值选择一个动作at,其中每个动作对应一个邻域结构。对实施了邻域结构搜索的个体进行解码得到新的适应度值,然后更新q表;
21、s8:对种群个体进行非支配排序以及拥挤度排序确定非支配的个体。
22、进一步的,所述s1中针对不同的向量分别采用了不同的初始化启发式方法生成psize个解,具体包括:
23、s11:首先采用随机方法以及最多工序剩余策略为工序排序;
24、s12:其次采用随机方法为工序分配一个随机的加工速度;
25、s13:最后采用随机的方法、局部最短加工时间以及全局最短加工时间为每道工序分配加工机床。
26、进一步的,所述s3中选择适应度较好的个体进行克隆,具体包括:
27、s31:从整个种群中选择e个适应度最好的个体;
28、s32:对三个目标分别对集合e中的个体进行归一化;
29、s33:计算每个个体三个目标归一化后的值然后相加作为每个个体的适应度值;
30、s34:按照轮盘赌计算每个个体的克隆个数。
31、进一步的,所述s7中基于q学习的超变异,具体包括:
32、s71:确定个体在当前的状态st以及变量ε的值;
33、s72:随机生成一个0-1的数值r;
34、s73:如果r<ε,则执行s74;否则执行s75
35、s74:以一个随机的概率为当前的个体选择一个动作at;
36、s75:选择q表中当前状态下对应最大q值的动作at作为当前的邻域结构;
37、s76:重新对当前个体解码;
38、s77:计算奖励值rt以及更新q表。
39、第三方面,本技术还提供了一种电子设备,包括:一个或多个处理器、一个或多个存储器、以及一个或多个计算机程序;其中,处理器与存储器连接,上述一个或多个计算机程序被存储在存储器中,当电子设备运行时,该处理器执行该存储器存储的一个或多个计算机程序,以使电子设备执行上述第二方面所述的方法。
40、第四方面,本技术还提供了一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成第二方面所述的方法。
41、第五方面,本技术还提供了一种计算机程序(产品),包括计算机程序,所述计算机程序当在一个或多个处理器上运行的时候用于实现前述第二方面任意一项的方法。
42、与现有技术相比,本发明的有益效果为:
43、1、本发明考虑到问题的复杂性和不确定性,建立了基于预测-反应动态/静态的重调度模型,其中涉及了四种响应包括新工件插入以及机床故障在内的不确定干扰的重调度策略;
44、2、本发明考虑fjsp中的动态事件、机床可变加工速度以及模糊加工时间约束条件,提出了一种基于左移启发式的动态解码方法来优化模糊完工时间。然后,采用了一种基于q学习的变异机制来对适应度比较高的个体进行变异。通过分析精英解集e中每个个体的状态以及当前迭代的epsilon值,为个体选择适合的动作即邻域结构来达到加速种群的收敛。其中,一共设计了四种随机的邻域结构以及四种目标驱动的邻域结构,通过q学习算法来引动邻域结构的选择。最后,分别验证了所提出的三种重调度策略的区别,q学习策略的有效性以及算法的有效性。
- 还没有人留言评论。精彩留言会获得点赞!