一种列车巡检装置巡检方法、系统、设备及存储介质与流程
本申请涉及轨道交通,具体地,涉及一种列车巡检装置巡检方法、系统、设备及存储介质。
背景技术:
1、高铁等列车需要定期在动车所进行检修和维护以保证其正常运行,目前,一般使用机器人来取代人力从事高铁检修维护等重复性工作。
2、然而,对于机器人来说,它们的定位通常是基于预先设定的坑道或动车所场景,很难处理高铁停车位置产生偏差的不同情况。但在使用机器人对高铁进行巡检和检修时,往往会面临因为高铁在动车所停车时,停车位置可能会有微小的偏移或变化的情况。目前的技术方案主要是在机器人巡检的坑道中让高铁反复调整停留在预想的位置上。当高铁停在正确的位置后,机器人就可以按照预定的路径进行巡检和检修工作。
3、但现有方案流程上较为复杂,人工操作难度较大,且由于机器人较为笨重,面对复杂现场不够灵活,机器人本身的能力空间也没有充分利用,会有较大的精度误差。
技术实现思路
1、为了解决上述技术缺陷之一,本申请实施例中提供了一种列车巡检装置巡检方法、系统、设备及存储介质。
2、根据本申请实施例的第一个方面,提供了一种列车巡检装置巡检方法,该方法包括:
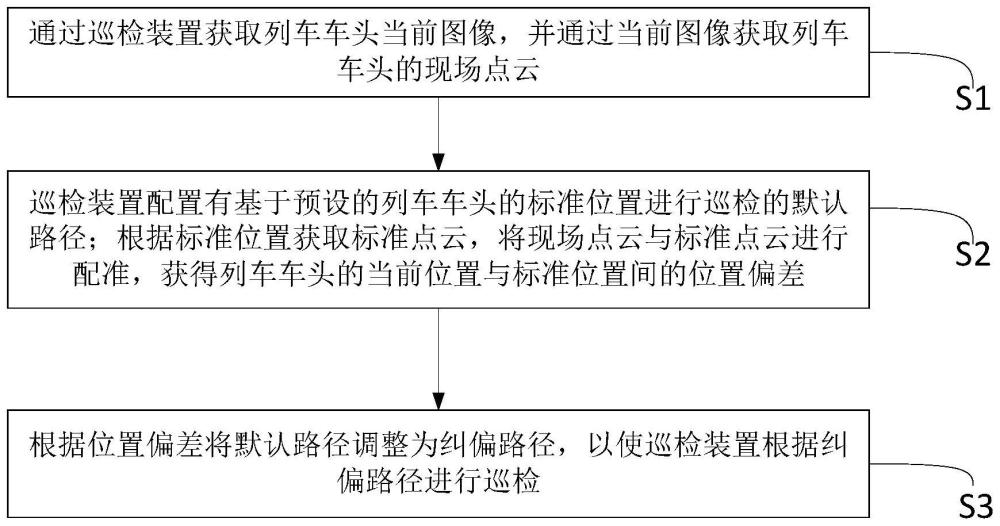
3、通过巡检装置获取列车车头当前图像,并通过当前图像获取列车车头的现场点云;
4、巡检装置配置有基于预设的列车车头的标准位置进行巡检的默认路径;根据标准位置获取标准点云,将现场点云与标准点云进行配准,获得列车车头的当前位置与标准位置间的位置偏差;
5、根据位置偏差将默认路径调整为纠偏路径,以使巡检装置根据纠偏路径进行巡检。
6、在本申请一个可选的实施例中,根据标准位置获取标准点云,将现场点云与标准点云进行配准的步骤还包括:
7、对现场点云和标准点云进行初始变换以完成点云对齐;
8、对于每个标准点云中的点,匹配寻找现场点云中的最近点;
9、根据最近点匹配结果,计算标准点云与现场点云之间的刚性变换,以完成标准点云与现场点云的配准。
10、在本申请一个可选的实施例中,对现场点云和标准点云进行初始变换以完成点云对齐的步骤还包括:
11、初始变换包括平移矩阵、单位矩阵。
12、在本申请一个可选的实施例中,根据最近点匹配结果,计算标准点云与现场点云之间的刚性变换的步骤还包括:
13、最小化标准点云与现场点云的点对之间的距离之和,以找到最佳对齐变换,完成刚性变换。
14、在本申请一个可选的实施例中,根据标准位置获取标准点云,将现场点云与标准点云进行配准的步骤还包括:
15、将现场点云与标准点云进行配准前,对现场点云与标准点云进行降采样处理。
16、在本申请一个可选的实施例中,通过巡检装置获取列车车头当前图像,并通过当前图像获取列车车头的现场点云的步骤还包括:
17、巡检装置配置有平面相机和激光雷达,平面相机用于获取列车车头当前图像,激光雷达用于采集列车车头的3d数据;
18、将列车车头当前图像与3d数据进行图像点位对应,以获取现场点云。
19、在本申请一个可选的实施例中,通过巡检装置获取列车车头当前图像,并通过当前图像获取列车车头的现场点云的步骤还包括:
20、通过平面相机获取包含列车车头的区域图像,进一步通过mask-rcnn网络对区域图像进行检测分割,以定位列车车头,获取列车车头当前图像。
21、根据本申请实施例的第二个方面,提供了一种列车巡检装置巡检系统,该系统包括现场点云获取模块、位置偏差计算模块和纠偏巡检模块;其中,
22、现场点云获取模块,用于通过巡检装置获取列车车头当前图像,并通过当前图像获取列车车头的现场点云;
23、位置偏差计算模块,巡检装置配置有基于预设的列车车头的标准位置进行巡检的默认路径;位置偏差计算模块用于根据标准位置获取标准点云,将现场点云与标准点云进行配准,获得列车车头的当前位置与标准位置间的位置偏差;
24、纠偏巡检模块,用于根据位置偏差将默认路径调整为纠偏路径,以使巡检装置根据纠偏路径进行巡检。
25、根据本申请实施例的第三个方面,提供了一种计算机设备,包括:存储器;处理器;以及计算机程序;其中,计算机程序存储在存储器中,并被配置为由处理器执行以实现如本申请实施例的第一个方面任一项方法的步骤。
26、根据本申请实施例的第四个方面,提供了一种计算机可读存储介质,其上存储有计算机程序;计算机程序被处理器执行以实现如本申请实施例的第一个方面任一项方法的步骤。
27、采用本申请实施例中提供的列车巡检装置巡检方法,具有以下有益效果:
28、本申请通过在现场图像中提取实际停车位置下的车头当前图像点云,再将标准图像点云和当前图像点云进行精确配准,基于此求得高铁停车的偏差量,以使巡检装置可以依据偏差量对默认程序进行纠偏,使得流程上更加自动化,减小了人工操作难度。
技术特征:
1.一种列车巡检装置巡检方法,其特征在于,包括:
2.根据权利要求1所述的列车巡检装置巡检方法,其特征在于,根据所述标准位置获取标准点云,将所述现场点云与所述标准点云进行配准的步骤还包括:
3.根据权利要求1或2所述的列车巡检装置巡检方法,其特征在于,对所述现场点云和所述标准点云进行初始变换以完成点云对齐的步骤还包括:
4.根据权利要求1或2所述的列车巡检装置巡检方法,其特征在于,根据最近点匹配结果,计算所述标准点云与所述现场点云之间的刚性变换的步骤还包括:
5.根据权利要求1或2所述的列车巡检装置巡检方法,其特征在于,根据所述标准位置获取标准点云,将所述现场点云与所述标准点云进行配准的步骤还包括:
6.根据权利要求1所述的列车巡检装置巡检方法,其特征在于,通过巡检装置获取列车车头当前图像,并通过所述当前图像获取所述列车车头的现场点云的步骤还包括:
7.根据权利要求6所述的列车巡检装置巡检方法,其特征在于,通过巡检装置获取列车车头当前图像,并通过所述当前图像获取所述列车车头的现场点云的步骤还包括:
8.一种列车巡检装置巡检系统,其特征在于,包括现场点云获取模块、位置偏差计算模块和纠偏巡检模块;其中,
9.一种计算机设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序;所述计算机程序被处理器执行以实现如权利要求1-7任一项所述的方法。
技术总结
本申请实施例提供一种列车巡检装置巡检方法、系统、设备及存储介质,涉及轨道交通技术领域。该方法通过巡检装置获取列车车头当前图像,并通过当前图像获取列车车头的现场点云;巡检装置配置有基于预设的列车车头的标准位置进行巡检的默认路径;根据标准位置获取标准点云,将现场点云与标准点云进行配准,获得列车车头的当前位置与标准位置间的位置偏差;根据位置偏差将默认路径调整为纠偏路径,以使巡检装置根据纠偏路径进行巡检。本申请采用双点云配准的方式求得高铁停车的偏差量,以使巡检装置可以依据偏差量对默认程序进行纠偏,使得流程上更加自动化,减小了人工操作难度。
技术研发人员:赵仲夏,李鑫,周高豪,龚月,林昌伟,赵勇
受保护的技术使用者:北京格灵深瞳信息技术股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!