一种全局定位方法、装置、可移动设备及电子设备与流程
本技术涉及图像定位,特别是涉及一种全局定位方法、装置、可移动设备及电子设备。
背景技术:
1、现有技术中,在一些应用场景中(例如,扫地机器人)是采用天花板的特征进行全局定位的。而采用天花板的特征进行全局定位一般采用顶置视觉slam(simultaneouslocalization and mapping,即时定位与地图构建)方案,而机器人在拍摄天花板的图像时,往往会有很多遮挡物,进而影响最后的定位结果,而现有技术中去除遮挡物的方式都是利用深度学习的方法,会消耗大量的计算资源,进而使得定位的效率不高。
技术实现思路
1、本技术实施例的目的在于提供一种全局定位方法、装置、可移动设备及电子设备,以实现快速去除遮挡物,提高全局定位效率。具体技术方案如下:
2、在本技术第一方面,提供了一种全局定位方法,所述方法包括:
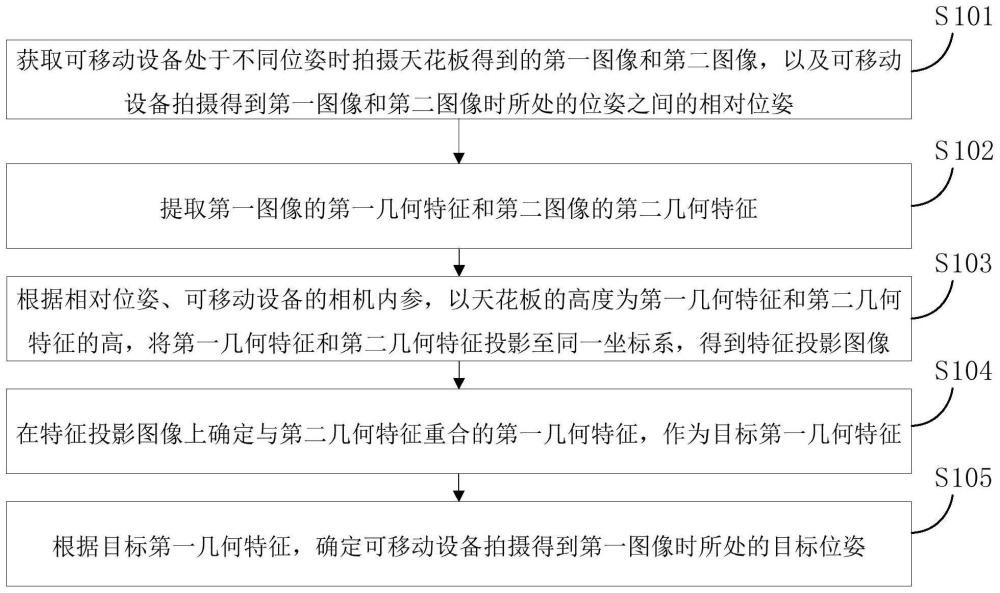
3、获取可移动设备处于不同位姿时拍摄天花板得到的第一图像和第二图像,以及所述可移动设备拍摄得到所述第一图像和所述第二图像时所处的位姿之间的相对位姿;
4、提取所述第一图像的第一几何特征和所述第二图像的第二几何特征;
5、根据所述相对位姿、所述可移动设备的相机内参,以天花板的高度为所述第一几何特征和所述第二几何特征的高,将所述第一几何特征和所述第二几何特征投影至同一坐标系,得到特征投影图像;
6、在所述特征投影图像上确定与第二几何特征重合的第一几何特征,作为目标第一几何特征;
7、根据所述目标第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿。
8、在一种可能的实现方式中,所述根据所述相对位姿、所述可移动设备的相机内参,以天花板的高度为所述第一几何特征和所述第二几何特征的高,将所述第一几何特征和所述第二几何特征投影至同一坐标系,得到特征投影图像,包括:
9、根据所述相对位姿、所述可移动设备的相机内参,建立所述第一图像在天花板上的与所述第二图像在天花板上的对应的转换关系;
10、根据所述转换关系,将所述第二几何特征投影至所述第一图像,得到特征投影图像。
11、在一种可能的实现方式中,所述几何特征包括线特征;
12、所述提取所述第一图像的第一几何特征和所述第二图像的第二几何特征,包括:
13、在所述第一图像中提取与运动方向的夹角大于预设夹角阈值的线特征,作为第一几何特征;并在所述第二图像中提取与所述运动方向的夹角大于所述预设夹角阈值的线特征,作为第二几何特征;其中,所述运动方向是所述可移动设备拍摄得到所述第二图像后到拍摄得到所述第一图像过程中的移动方向。
14、在一种可能的实现方式中,所述方法还包括:
15、在所述第一图像中提取与所述目标第一几何特征垂直且相接的线特征,作为补充第一几何特征;
16、所述根据所述目标第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿,包括:
17、根据所述目标第一几何特征和所述补充第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿。
18、在一种可能的实现方式中,所述在所述特征投影图像上确定与第二几何特征重合的第一几何特征,作为目标第一几何特征,包括:
19、在所述特征投影图像上确定与所述第一几何特征的重合度大于预设重合阈值的第一几何特征,作为目标第一几何特征。
20、在本技术第二方面,提供了一种可移动设备,所述可移动设备包括:
21、位姿传感器,用于实时监测所述可移动设备的位姿;
22、相机,用于在所述可移动设备处于不同位姿时,拍摄天花板;
23、处理器,用于获取所述相机拍摄天花板得到的第一图像和第二图像,提取所述第一图像的第一几何特征和所述第二图像的第二几何特征;以及获取所述可移动设备拍摄得到所述第一图像时所述位姿传感器感应到的第一位姿和拍摄得到所述第二图像时所述位姿传感器感应到的第二位姿之间的相对位姿;根据所述相对位姿、所述可移动设备的相机内参,以天花板的高度为所述第一几何特征和所述第二几何特征的高,将所述第一几何特征和所述第二几何特征投影至同一坐标系,得到特征投影图像;在所述特征投影图像上确定与第二几何特征重合的第一几何特征,作为目标第一几何特征;根据所述目标第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿。
24、在一种可能的实现方式中,所述处理器根据所述相对位姿、所述可移动设备的相机内参,以天花板的高度为所述第一几何特征和所述第二几何特征的高,将所述第一几何特征和所述第二几何特征投影至同一坐标系,得到特征投影图像,包括:
25、根据所述相对位姿、所述可移动设备的相机内参,建立所述第一图像在天花板上的与所述第二图像在天花板上的对应的转换关系;
26、根据所述转换关系,将所述第二几何特征投影至所述第一图像,得到特征投影图像;
27、所述几何特征包括线特征;
28、所述提取所述第一图像的第一几何特征和所述第二图像的第二几何特征,包括:
29、在所述第一图像中提取与运动方向的夹角大于预设夹角阈值的线特征,作为第一几何特征;并在所述第二图像中提取与所述运动方向的夹角大于所述预设夹角阈值的线特征,作为第二几何特征;其中,所述运动方向是所述可移动设备拍摄得到所述第二图像后到拍摄得到所述第一图像过程中的移动方向;
30、所述处理器还用于在所述第一图像中提取与所述目标第一几何特征垂直且相接的线特征,作为补充第一几何特征;
31、所述根据所述目标第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿,包括:
32、根据所述目标第一几何特征和所述补充第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿;
33、所述在所述特征投影图像上确定与第二几何特征重合的第一几何特征,作为目标第一几何特征,包括:
34、在所述特征投影图像上确定与所述第二几何特征的重合度大于预设重合阈值的第一几何特征,作为目标第一几何特征。
35、在本技术第三方面,提供了一种全局定位装置,所述装置包括:
36、获取模块,用于获取可移动设备处于不同位姿时拍摄天花板得到的第一图像和第二图像,以及所述可移动设备拍摄得到所述第一图像和所述第二图像时所处的位姿之间的相对位姿;
37、提取模块,用于提取所述第一图像的第一几何特征和所述第二图像的第二几何特征;
38、投影模块,用于根据所述相对位姿、所述可移动设备的相机内参,以天花板的高度为所述第一几何特征和所述第二几何特征的高,将所述第一几何特征和所述第二几何特征投影至同一坐标系,得到特征投影图像;
39、目标特征确定模块,用于在所述特征投影图像上确定与第二几何特征重合的第一几何特征,作为目标第一几何特征;
40、目标位姿确定模块,用于根据所述目标第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿。
41、在一种可能的实现方式中,所述投影模块根据所述相对位姿、所述可移动设备的相机内参,以天花板的高度为所述第一几何特征和所述第二几何特征的高,将所述第一几何特征和所述第二几何特征投影至同一坐标系,得到特征投影图像,包括:
42、根据所述相对位姿、所述可移动设备的相机内参,建立所述第一图像在天花板上的与所述第二图像在天花板上的对应的转换关系;
43、根据所述转换关系,将所述第二几何特征投影至所述第一图像,得到特征投影图像。
44、在一种可能的实现方式中,所述几何特征包括线特征;
45、所述提取模块提取所述第一图像的第一几何特征和所述第二图像的第二几何特征,包括:
46、在所述第一图像中提取与运动方向的夹角大于预设夹角阈值的线特征,作为第一几何特征;并在所述第二图像中提取与所述运动方向的夹角大于所述预设夹角阈值的线特征,作为第二几何特征;其中,所述运动方向是所述可移动设备拍摄得到所述第二图像后到拍摄得到所述第一图像过程中的移动方向;
47、所述装置还包括:
48、补充特征确定模块,用于在所述第一图像中提取与所述目标第一几何特征垂直且相接的线特征,作为补充第一几何特征;
49、所述根据所述目标第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿,包括:
50、根据所述目标第一几何特征和所述补充第一几何特征,确定所述可移动设备拍摄得到所述第一图像时所处的目标位姿;
51、所述目标特征确定模块在所述特征投影图像上确定与第二几何特征重合的第一几何特征,作为目标第一几何特征,包括:
52、在所述特征投影图像上确定与所述第一几何特征的重合度大于预设重合阈值的第一几何特征,作为目标第一几何特征。
53、在本技术第四方面,提供了一种电子设备,包括:
54、存储器,用于存放计算机程序;
55、处理器,用于执行存储器上所存放的程序时,实现上述第一方面任一所述的方法。
56、在本技术第五方面,提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面任一所述的方法。
57、本技术实施例有益效果:
58、本技术实施例提供的一种全局定位方法、装置及电子设备,可以获取可移动设备处于不同位姿时拍摄天花板得到的第一图像和第二图像,以及可移动设备拍摄得到第一图像和第二图像时所处的位姿之间的相对位姿;提取第一图像的第一几何特征和第二图像的第二几何特征;根据相对位姿、可移动设备的相机内参,以天花板的高度为第一几何特征和第二几何特征的高,将第一几何特征和第二几何特征投影至同一坐标系,得到特征投影图像;在特征投影图像上确定与第二几何特征重合的目标第一几何特征;根据目标第一几何特征,确定可移动设备拍摄得到第一图像时所处的目标位姿。本技术实施例中,通过先提取处于不同位姿拍摄得到的第一图像的第一几何特征与第二图像的第二几何特征,然后将第一几何特征、第二几何特征投影至同一坐标系下,由于是基于天花板的高度进行投影的,所以在投影时,只有实际高度是天花板的高度的第二几何特征会与第一几何特征重合,而这些重合的目标第一几何特征就是天花板上的特征,进而可以快速将不属于天花板的特征筛除。最后基于天花板的目标几何特征确定出可移动设备拍摄得到第一图像时所处的目标位姿。由于只是根据不同位姿处拍摄得到的图像的特征投影偏差就可以快速筛除掉不属于天花板的特征,进而无需复杂的计算,提高了全局定位的效率。
59、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!