工程机械的塌陷识别方法、装置、处理器及计算机可读存储介质与流程
本发明涉及工程机械,特别是涉及一种工程机械的塌陷识别方法、装置、处理器及计算机可读存储介质。
背景技术:
1、混凝土泵车是基于压力实现沿臂架管道连续输送混凝土至施工现场的工程机械。混凝土泵车一般由臂架、底架支撑、泵送单元、底盘、电控五部分组成。混凝土泵车在作业时,臂架会外伸打料,故需要利用支腿支撑以保持整机稳定。在作业时,支腿所在地面可能发生塌陷进而导致混凝土泵车倾翻的事故,起重机、高空消防车等也可能发生类似事故,一般而言,配置支腿支撑以保持整机稳定的移动式工程机械都存在类似问题。
2、支腿支撑地面发生塌陷时会使混凝土泵车存在倾翻风险,进而会造成设备损坏、产生经济损失,还可能砸中施工人员,威胁人员安全,塌陷发生时,施工人员若未能及时察觉并躲避,还容易导致人员伤亡。因此,及时且准确地预警支腿支撑地面发生塌陷是迫切的安全需求。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种工程机械的塌陷识别方法、装置、处理器及计算机可读存储介质,能够及时、准确地识别地面塌陷的发生。
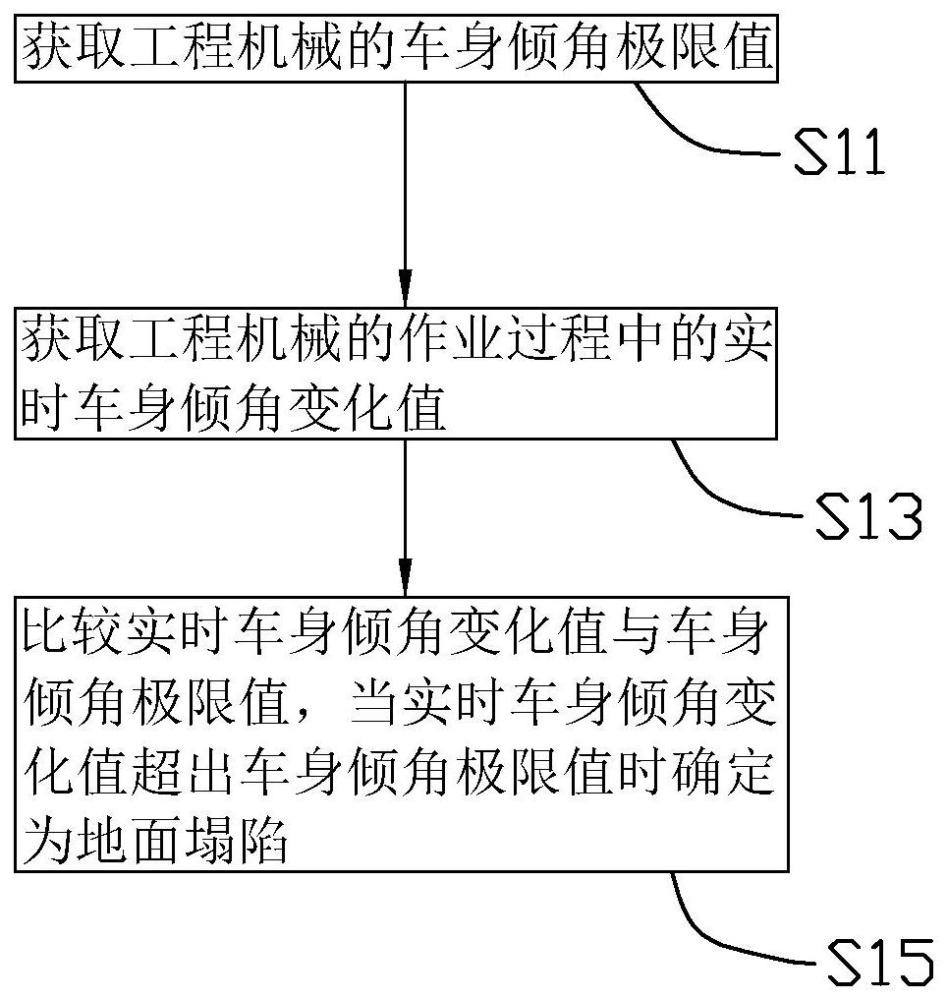
2、为达到上述目的,本发明提供一种工程机械的塌陷识别方法,所述方法包括:
3、获取工程机械的车身倾角极限值;
4、获取工程机械在作业过程中的实时车身倾角变化值;
5、比较所述实时车身倾角变化值与所述车身倾角极限值,当所述实时车身倾角变化值超出所述车身倾角极限值时确定为地面塌陷。
6、可选地,所述获取工程机械的车身倾角极限值的步骤具体包括:
7、获取支腿全支撑,支撑支腿的地面未发生塌陷,且臂架处于初始状态时的第一初始车身倾角;
8、获取支腿全支撑,支撑支腿的地面未发生塌陷,且臂架倾翻力矩最大时的工程机械的车身倾角值作为最大车身倾角;
9、计算所述第一初始车身倾角与所述最大车身倾角的差值,并将所述第一初始车身倾角与所述最大车身倾角的差值作为所述车身倾角极限值。
10、可选地,所述获取工程机械在作业过程中的实时车身倾角变化值的步骤具体包括:
11、将工程机械的支腿撑开,使工程机械处于待施工状态;
12、获取支撑支腿的地面未发生塌陷,且臂架处于初始状态时的第二初始车身倾角;
13、获取工程机械施工时的当前车身倾角值;
14、计算所述第二初始车身倾角与所述当前车身倾角值的差值,并将所述第二初始车身倾角与所述当前车身倾角值的差值作为所述实时车身倾角变化值。
15、可选地,在所述获取工程机械的车身倾角极限值的步骤中,获取车身绕x轴的第一初始倾角以及绕y轴的第二初始倾角作为第一初始车身倾角;使臂架在臂架倾翻力矩最大时回转一圈,并获取回转过程中的车身绕x轴朝两个相反方向倾斜的最大倾角和,以及绕y轴朝两个相反方向倾斜的最大倾角和作为所述最大车身倾角;通过计算车身绕x轴朝两个相反方向倾斜的最大倾角和与车身绕x轴的第一初始倾角的差值得到第二方向上极限值和第二方向下极限值,并计算车身绕y轴朝两个相反方向倾斜的最大倾角和与绕y轴的第二初始倾角的差值得到第一方向上极限值和第一方向下极限值,并将所述第一方向上极限值、所述第一方向下极限值、所述第二方向上极限值和所述第二方向下极限值作为所述安全车身倾角。
16、可选地,在所述获取工程机械在作业过程中的实时车身倾角变化值的步骤中,获取车身绕x轴的第二初始倾角以及绕y轴的第二初始倾角作为第二初始车身倾角;
17、获取工程机械施工时车身绕x轴的当前倾角以及绕y轴的当前倾角作为所述当前车身倾角值;
18、获取车身绕x轴的第二方向倾角变化值以及绕y轴的第一方向倾角变化值,并将所述第二方向倾角变化值和绕y轴的所述第一方向倾角变化值作为所述实时车身倾角变化值;车身绕x轴的所述第二方向倾角变化值为车身绕x轴的所述第二初始倾角与所述当前倾角的差值,车身绕y轴的所述第一方向倾角变化值为绕y轴的所述第二初始倾角与所述当前倾角的差值。
19、可选地,所述比较所述实时车身倾角变化值与所述车身倾角极限值,当所述实时车身倾角变化值超出所述车身倾角极限值时确定为地面塌陷的步骤具体包括:比较所述第一方向倾角变化值与所述第一方向上极限值、所述第一方向下极限值,且比较所述第二方向倾角变化值与所述第二方向上极限值、所述第二方向下极限值,当所述第一方向倾角变化值大于所述第一方向上极限值或者所述第一方向倾角变化值小于所述第一方向下极限值,且所述第二方向倾角变化值大于所述第二方向上极限值或者所述第二方向倾角变化值小于所述第二方向下极限值时,判断为地面发生塌陷,否则判断为地面未发生塌陷。
20、可选地,当所述第一方向倾角变化值大于所述第一方向上极限值或者所述第一方向倾角变化值小于所述第一方向下极限值,且第二方向倾角变化值大于所述第二方向上极限值或者第二方向倾角变化值小于所述第二方向下极限值时判断为地面发生塌陷具体为:当所述第一方向倾角变化值大于所述第一方向上极限值,且第二方向倾角变化值大于所述第二方向上极限值时,判断为左前支腿地面发生塌陷;当所述第一方向倾角变化值大于所述第一方向上极限值,且第二方向倾角变化值小于所述第二方向下极限值时,判断为右前支腿地面发生塌陷;当所述第一方向倾角变化值小于所述第一方向下极限值,且第二方向倾角变化值第二方向倾角变化值大于所述第二方向上极限值时,判断为左后支腿地面发生塌陷;当所述第一方向倾角变化值小于所述第一方向下极限值,且第二方向倾角变化值小于所述第二方向下极限值时,判断为右后支腿地面发生塌陷。
21、本申请还提供一种处理器,被配置成执行上述工程机械的塌陷识别方法。
22、本申请还提供一种工程机械的塌陷识别装置,包括:
23、倾角传感器,用于获取工程机械的车身倾角;以及
24、上述处理器。
25、本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上任一所述的方法的步骤。
26、本申请的工程机械的塌陷识别方法中,只需测量车身倾斜角度,通过车身倾角传感器即可实现,可行性高,且在车身上布置传感器线束可靠性高,不易破坏。同时通过获取工程机械的车身倾角极限值,可实现对任意支撑工况下的支腿所在地面的塌陷识别。
技术特征:
1.一种工程机械的塌陷识别方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述获取工程机械的车身倾角极限值的步骤具体包括:
3.如权利要求2所述的方法,其特征在于,所述获取工程机械在作业过程中的实时车身倾角变化值的步骤具体包括:
4.如权利要求3所述的方法,其特征在于,在所述获取工程机械的车身倾角极限值的步骤中,获取车身绕x轴的第一初始倾角(ya0)以及绕y轴的第二初始倾角(xa0)作为第一初始车身倾角;使臂架在臂架倾翻力矩最大时回转一圈,并获取回转过程中的车身绕x轴朝两个相反方向倾斜的最大倾角(ya+)和(ya-),以及绕y轴朝两个相反方向倾斜的最大倾角(xa+)和(xa-)作为所述最大车身倾角;通过计算车身绕x轴朝两个相反方向倾斜的最大倾角(ya+)和(ya-)与车身绕x轴的第一初始倾角(ya0)的差值得到第二方向上极限值(△ya+)和第二方向下极限值(△ya-),并计算车身绕y轴朝两个相反方向倾斜的最大倾角(xa+)和(xa-)与绕y轴的第二初始倾角(xa0)的差值得到第一方向上极限值(△xa+)和第一方向下极限值(△xa-),并将所述第一方向上极限值(△xa+)、所述第一方向下极限值(△xa-)、所述第二方向上极限值(△ya+)和所述第二方向下极限值(△ya-)作为所述安全车身倾角。
5.如权利要求4所述的方法,其特征在于,在所述获取工程机械在作业过程中的实时车身倾角变化值的步骤中,获取车身绕x轴的第二初始倾角(ya0’)以及绕y轴的第二初始倾角(xa0’)作为第二初始车身倾角;
6.如权利要求5所述的方法,其特征在于,所述比较所述实时车身倾角变化值与所述车身倾角极限值,当所述实时车身倾角变化值超出所述车身倾角极限值时确定为地面塌陷的步骤具体包括:比较所述第一方向倾角变化值(△xa’)与所述第一方向上极限值(△xa+)、所述第一方向下极限值(△xa-),且比较所述第二方向倾角变化值(△ya’)与所述第二方向上极限值(△ya+)、所述第二方向下极限值(△ya-),当所述第一方向倾角变化值(△xa’)大于所述第一方向上极限值(△xa+)或者所述第一方向倾角变化值(△xa’)小于所述第一方向下极限值(△xa-),且所述第二方向倾角变化值(△ya’)大于所述第二方向上极限值(△ya+)或者所述第二方向倾角变化值(△ya’)小于所述第二方向下极限值(△ya-)时,判断为地面发生塌陷,否则判断为地面未发生塌陷。
7.如权利要求6所述的方法,其特征在于,当所述第一方向倾角变化值(△xa’)大于所述第一方向上极限值(△xa+)或者所述第一方向倾角变化值(△xa’)小于所述第一方向下极限值(△xa-),且第二方向倾角变化值(△ya’)大于所述第二方向上极限值(△ya+)或者第二方向倾角变化值(△ya’)小于所述第二方向下极限值(△ya-)时判断为地面发生塌陷具体为:当所述第一方向倾角变化值(△xa’)大于所述第一方向上极限值(△xa+),且第二方向倾角变化值(△ya’)大于所述第二方向上极限值(△ya+)时,判断为左前支腿地面发生塌陷;当所述第一方向倾角变化值(△xa’)大于所述第一方向上极限值(△xa+),且第二方向倾角变化值(△ya’)小于所述第二方向下极限值(△ya-)时,判断为右前支腿地面发生塌陷;当所述第一方向倾角变化值(△xa’)小于所述第一方向下极限值(△xa-),且第二方向倾角变化值第二方向倾角变化值(△ya’)大于所述第二方向上极限值(△ya+)时,判断为左后支腿地面发生塌陷;当所述第一方向倾角变化值(△xa’)小于所述第一方向下极限值(△xa-),且第二方向倾角变化值(△ya’)小于所述第二方向下极限值(△ya-)时,判断为右后支腿地面发生塌陷。
8.一种处理器,其特征在于,被配置成执行如权利要求1-7任意一项所述的工程机械的塌陷识别方法。
9.一种工程机械的塌陷识别装置,其特征在于,所述工程机械的塌陷识别装置包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的方法的步骤。
技术总结
本发明公开一种工程机械的塌陷识别方法、装置、处理器及计算机可读存储介质,该工程机械的塌陷识别方法包括:获取工程机械的车身倾角极限值;获取工程机械在作业过程中的实时车身倾角变化值;比较实时车身倾角变化值与车身倾角极限值,当实时车身倾角变化值超出车身倾角极限值时确定为地面塌陷。本发明实施例的工程机械的塌陷识别方法、装置、处理器及计算机可读存储介质中,只需测量车身倾斜角度,通过车身倾角传感器即可实现,可行性高,且在车身上布置传感器线束可靠性高,不易破坏。同时通过获取工程机械的车身倾角极限值,可实现对任意支撑工况下的支腿所在地面的塌陷识别。
技术研发人员:蒋贵春,黄灿,尹君,佟祥伟
受保护的技术使用者:中联重科股份有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!