一种寻车方法、装置、设备及介质与流程
本技术涉及网约车,尤其涉及一种寻车方法、装置、设备及介质。
背景技术:
1、网约车给人们的生活带来了很多便捷,已成为人们出行常态。借助平台服务器的下单端,乘客发起订单,平台服务器基于该订单的订单信息为该乘客进行派单或播单,接单成功的司机按照该订单的行程起点到达上车点,并通知平台服务器车辆已到达该上车点;乘客在到达该上车点附近后,在寻找该接单成功的车辆过程中,通常是根据该车辆的车牌号确认车辆。
2、然而,由于车牌通常在车辆的前端和后端展示,乘客在寻找该车辆时,往往需要通过查看车辆的前端或后端的车牌号来确认车辆,这样,不仅耗时长且不安全,也容易出错;尤其在交通拥堵、停驶车辆较多的场景下,寻找该车辆所耽搁的时间,延迟了乘客到达目的地的时间,降低了出行便捷度、出行效率。
技术实现思路
1、本技术实施例提供一种寻车方法、装置、设备及介质,用以提高出行便捷度和安全度,提高出行效率。
2、本技术实施例提供的具体技术方案如下:
3、第一方面,本技术实施例提供一种寻车方法,包括:
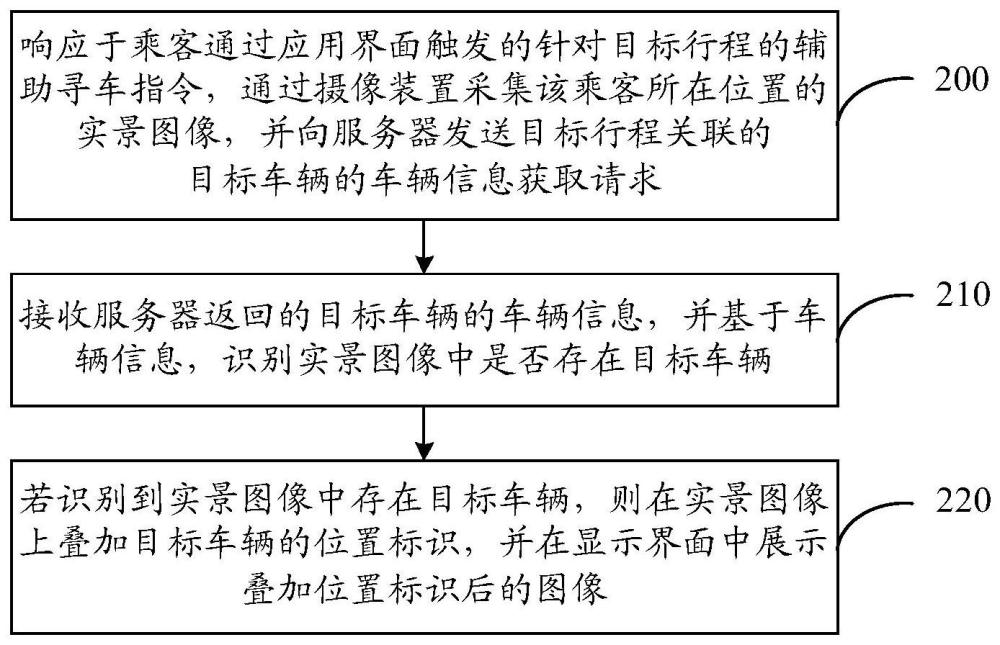
4、响应于乘客通过应用界面触发的针对目标行程的辅助寻车指令,通过摄像装置采集所述乘客所在位置的实景图像,并向服务器发送所述目标行程关联的目标车辆的车辆信息获取请求;
5、接收所述服务器返回的所述目标车辆的车辆信息,并基于所述车辆信息,识别所述实景图像中是否存在所述目标车辆;
6、若识别到所述实景图像中存在所述目标车辆,则在所述实景图像上叠加所述目标车辆的位置标识,并在显示界面中展示叠加所述位置标识后的图像。
7、采用本技术实施例中提供的一种寻车方法,为乘客提供一种智能寻车功能,乘客通过应用界面触发辅助寻车指令后,通过摄像装置采集乘客所在位置的实景图像,借助增强现实(augmented reality,ar)技术,在实景图像中叠加目标车辆的位置标识,并在显示界面中显示该叠加位置标识后的图像,这样,乘客便可以通过显示界面中展示的目标车辆的位置标识,快速找到目标车辆,从而缩短寻找车辆的时间,提高出行便捷度和安全度,同时也提高了出行效率。
8、在一种可能的实现方式中,所述车辆信息包括所述目标车辆的车辆固有特征、驻车位置信息和驻车周边环境图像中的部分或全部;
9、其中,所述车辆固有特征包括车辆外形特征、车辆颜色特征和车牌标识特征中的部分或全部;所述驻车位置信息是在所述目标车辆到达所述目标行程的上车点后,由所述目标车辆的车载终端上报给所述服务器的,所述驻车周边环境图像是所述服务器在确定所述目标车辆到达所述上车点后,通过所述目标车辆的图像采集装置采集并上传的。
10、在一种可能的实现方式中,所述基于所述车辆信息,识别所述实景图像中是否存在所述目标车辆,包括:
11、基于所述乘客的用户位置信息和所述驻车位置信息,确定所述乘客和所述目标车辆之间的距离是否小于预设值;
12、若是,则基于所述实景图像、所述车辆固有特征和所述驻车周边环境图像,识别所述实景图像中是否存在所述目标车辆;
13、若否,则确定识别到所述实景图像中不存在所述目标车辆。
14、在一种可能的实现方式中,所述基于所述实景图像、所述车辆固有特征和所述驻车周边环境图像,识别所述实景图像中是否存在所述目标车辆,包括:
15、对所述实景图像进行车辆识别,并对识别出的参考车辆进行特征提取,得到所述实景图像中各参考车辆对应的实景车辆特征;
16、针对所述各参考车辆中的任一参考车辆,将所述任一参考车辆对应的实景车辆特征,分别与所述车辆固有特征和驻车周边环境图像对应的周边环境特征进行匹配,得到所述任一参考车辆对应的总匹配率;
17、若所述实景图像中各参考车辆对应的总匹配率之和大于匹配率阈值,则确定识别到所述实景图像中存在所述目标车辆;
18、若所述实景图像中各参考车辆对应的总匹配率之和小于或等于所述匹配率阈值,则确定未识别所述实景图像中不存在所述目标车辆。
19、在一种可能的实现方式中,所述识别所述实景图像中不存在所述目标车辆之后,还包括:
20、基于所述实景图像对应的参考方位信息、所述用户位置信息和所述驻车位置信息,确定所述乘客从当前位置移动到所述目标车辆所在位置的转向信息;
21、基于所述转向信息和所述距离,生成导航指引信息;
22、在所述实景图像上叠加所述导航指引信息,并在所述显示界面中展示叠加所述导航指引信息后的图像。
23、第二方面,本技术实施例提供一种寻车装置,包括:
24、采集和获取模块,用于响应于乘客通过应用界面触发的针对目标行程的辅助寻车指令,通过摄像装置采集所述乘客所在位置的实景图像,并向服务器发送所述目标行程关联的目标车辆的车辆信息获取请求;
25、识别模块,用于接收所述服务器返回的所述目标车辆的车辆信息,并基于所述车辆信息,识别所述实景图像中是否存在所述目标车辆;
26、增强现实模块,用于若识别到所述实景图像中存在所述目标车辆,则在所述实景图像上叠加所述目标车辆的位置标识,并在显示界面中展示叠加所述位置标识后的图像。
27、在一种可能的实现方式中,所述车辆信息包括所述目标车辆的车辆固有特征、驻车位置信息和驻车周边环境图像中的部分或全部;
28、其中,所述车辆固有特征包括车辆外形特征、车辆颜色特征和车牌标识特征中的部分或全部;所述驻车位置信息是在所述目标车辆到达所述目标行程的上车点后,由所述目标车辆的车载终端上报给所述服务器的,所述驻车周边环境图像是所述服务器在确定所述目标车辆到达所述上车点后,通过所述目标车辆的图像采集装置采集并上传的。
29、在一种可能的实现方式中,所述基于所述车辆信息,识别所述实景图像中是否存在所述目标车辆,所述识别模块具体用于:
30、基于所述乘客的用户位置信息和所述驻车位置信息,确定所述乘客和所述目标车辆之间的距离是否小于预设值;
31、若是,则基于所述实景图像、所述车辆固有特征和所述驻车周边环境图像,识别所述实景图像中是否存在所述目标车辆;
32、若否,则确定识别到所述实景图像中不存在所述目标车辆。
33、在一种可能的实现方式中,所述识别模块具体用于:
34、对所述实景图像进行车辆识别,并对识别出的参考车辆进行特征提取,得到所述实景图像中各参考车辆对应的实景车辆特征;
35、针对所述各参考车辆中的任一参考车辆,将所述任一参考车辆对应的实景车辆特征,分别与所述车辆固有特征和驻车周边环境图像对应的周边环境特征进行匹配,得到所述任一参考车辆对应的总匹配率;
36、若所述实景图像中各参考车辆对应的总匹配率之和大于匹配率阈值,则确定识别到所述实景图像中存在所述目标车辆;
37、若所述实景图像中各参考车辆对应的总匹配率之和小于或等于所述匹配率阈值,则确定识别到所述实景图像中不存在所述目标车辆。
38、在一种可能的实现方式中,所述识别到所述实景图像中不存在所述目标车辆之后,所述增强现实模块还用于:
39、基于所述实景图像对应的参考方位信息、所述用户位置信息和所述驻车位置信息,确定所述乘客从当前位置移动到所述目标车辆所在位置的转向信息;
40、基于所述转向信息和所述距离,生成导航指引信息;
41、在所述实景图像上叠加所述导航指引信息,并在所述显示界面中展示叠加所述导航指引信息后的图像。
42、第三方面,本技术实施例提供一种电子设备,包括:
43、存储器,用于存储计算机程序或指令;
44、处理器,用于执行所述存储器中的计算机程序或指令,使得如第一方面中任一所述的方法被执行。
45、第四方面,本技术实施例提供一种计算机可读存储介质,当所述存储介质中的指令由处理器执行时,使得所述处理器能够执行上述第一方面中任一项所述的方法。
46、第五方面,本技术实施例提供一种计算机程序产品,所述计算机程序产品包括:计算机程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行第一方面中任一项所述的方法。
47、另外,第二方面至第五方面中任意一种实现方式所带来的技术效果可参见第一方面中不同实现方式所带来的技术效果,此处不再赘述。
48、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!