一种大视野下运动车辆的识别方法、装置和计算机设备
本发明属于图像处理,具体涉及一种大视野下运动车辆的识别方法、装置和计算机设备。
背景技术:
1、近年来,随着计算机算力的极大提升和大数据时代的到来,人工智能领域迎来了前所未有的发展机遇。深度学习作为人工智能领域的重要技术,在图像处理、自然语言处理、语音识别等领域大放异彩。在图像处理领域,利用深度学习技术处理分析各种各样应用场景下的图像,为人们的生活和工业生产制造带来了极大的便利,节省了大量的人力物力,为智能化城市、智能化工厂的建设夯实了技术基础。
2、车牌识别系统(license plate recognition system,lprs)是计算机视觉、机器视觉领域技术在交通场景识别中的一种广泛应用。研究最早始于上世纪80年代的图像处理技术,上世纪90年代的模式识别技术即结构特征法、统计特征法等,以及近年来的深度学习和人工神经网络技术(ann)。随着智慧城市的逐渐完善,各种交通场景下的智能车牌检测识别系统陆续普及。比如停车场的出入口采用车牌识别技术,进入的机动车辆可以自动计算使用时间来收取费用,同时能够实时显示车位占用情况,很大程度上提高了停车场的利用率和管理效率。在上述普及的应用场景外,车牌识别相关技术也逐渐应用于监管道路交通违章、追缴失窃车辆、监控通缉车辆、调度特种车辆等一系列场合。
3、在传统特定场景下,采用传统的车牌识别算法(近距离、有补光、俯视视角、高速摄像头条件下)可以满足日常的需要。然而,在远距离、多车道、车辆高速运动下使用普通相机等复杂场景中采集的图像很难识别。当下的车牌识别系统对这些类似场景下的车牌识别能力相对较弱,探索复杂场景条件下检测速度和准确性都可以满足需要的车牌识别算法至关重要。
技术实现思路
1、本发明的目的在于克服上述现有技术的缺点,提供一种大视野下运动车辆的识别方法、装置和计算机设备,以解决现有技术中,在远距离、多车道、车辆高速运动下使用普通相机在复杂场景中采集的图像难以识别,车牌识别系统对车牌识别能力差的问题。
2、为达到上述目的,本发明采用以下技术方案予以实现:
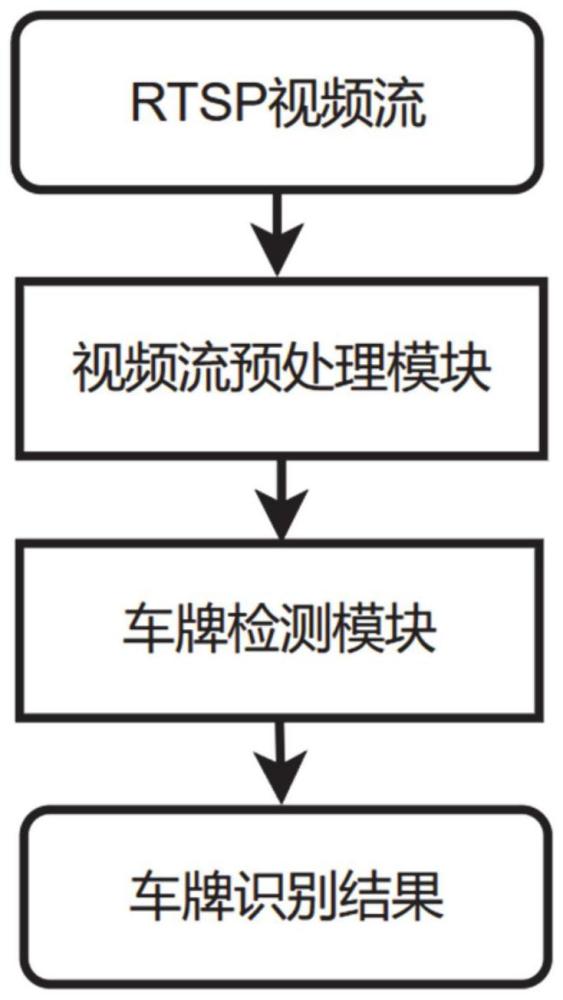
3、一种大视野下运动车辆的识别方法,包括以下步骤:
4、s1,采集包含车辆及车牌的现场图片作为原始高清图像,将原始高清图像压缩处理后获得小尺寸图像;
5、s2,通过车辆脸部识别模型对小尺寸图像中的车脸进行定位,获得车辆的前脸位置信息,通过映射关系在原始高清图像中裁出车辆的前脸,获得车辆前脸区域图像数据;
6、所述车辆脸部识别模型通过tiny yolov7目标检测算法训练后得到;
7、s3,通过车牌定位和识别模型对车辆前脸区域图像数据进行识别,获得车牌区域高清图像;
8、所述车牌定位和识别模型通过yolov7算法训练得到;
9、s4,通过ocr模型识别车牌区域高清图像中的文字信息,匹配文字信息与车牌库中的数据,获得车牌识别结果。
10、本发明的进一步改进在于:
11、优选的,s1中,所述原始高清图像通过rtsp视频流解码后获得。
12、优选的,s2中,获得车辆的前脸位置信息的具体过程为:
13、s2.1,通过车辆脸部识别模型检测小尺寸图像,目标检测标注工具标注出车辆前脸的位置框和类别;
14、s2.2,基于车辆前脸的位置框和类别,判断车辆前脸区域和设定检测区域是否重合,如果重合,则车辆到达设定检测区域,获得车辆的前脸位置信息。
15、优选的,s2.1中,如果没有检测到车辆,则单帧推理结束,执行s1;
16、s2.2中,如果车辆前脸区域和设定检测区域没有重合,则单帧推理结束,执行s1。
17、优选的,s2中,所述车辆脸部识别模型的训练过程为:
18、(1)对小尺寸图像,标注各种车辆前脸的位置框和类别,获得小尺寸图像现场数据;
19、(2)对小尺寸图像现场数据进行扩增,获得多种亮度、多种角度和多种环境下的扩增后的小尺寸图像现场数据;
20、(3)将扩增后的小尺寸图像现场数据,通过tiny yolov7算法训练车辆的前脸检测模型,获得最终的车辆脸部识别模型。
21、优选的,s3中,通过车牌定位和识别模型对车辆前脸区域图像数据进行识别的具体过程为:
22、s3.1,通过labelimg目标检测标注工具对车辆前脸区域图像数据中的车牌位置框进行标注,获得数字框和类别;
23、s3.2,通过车牌检测和识别模型对标注后的车牌进行检测,获得车牌候选区域;
24、s3.3,对车牌候选区域进行拓扑位置验证,判断车牌和车辆的相对位置关系是否符合规定条件,如果符合,则获得车牌区域高清图像。
25、优选的,s3中,所述车牌定位和识别模型的训练过程为:
26、(1)对车辆前脸区域图像数据,通过labelimg目标检测工具标注车辆前脸上车牌的位置框,获得数字框和类别;
27、(2)将车辆前脸区域图像和标签数据分为训练集和验证集,通过yolv7算法训练车牌检测和识别模型。
28、一种大视野下运动车辆的识别装置,包括:
29、采集模块,用于采集包含车辆及车牌的现场图片作为原始高清图像,将原始高清图像压缩处理后获得小尺寸图像;
30、车脸识别模块,用于通过车辆脸部识别模型对小尺寸图像中的车脸进行定位,获得车辆的前脸位置信息,通过映射关系在原始高清图像中裁出车辆的前脸,获得车辆前脸区域图像数据;所述车辆脸部识别模型通过tiny yolov7目标检测算法训练后得到;
31、车牌识别模块,用于通过车牌定位和识别模型对车辆前脸区域图像数据进行识别,获得车牌区域高清图像;所述车牌定位和识别模型通过yolov7算法训练得到;
32、文字识别模块,用于通过ocr模型识别车牌区域高清图像中的文字信息,匹配文字信息与车牌库中的数据,获得车牌识别结果。
33、一种计算机设备,所述设备包括:
34、一个或多个处理器;
35、用于存储所述一个或多个处理器可执行指令的一个或多个存储器;
36、其中,所述一个或多个处理器被配置为执行权利要求1-8任一项大视野下运动车辆的识别方法步骤。
37、与现有技术相比,本发明具有以下有益效果:
38、本发明公开了一种大视野下运动车辆的识别方法,针对条件限定场中需要在车辆快速运动中进行远距离的快速精准实时车牌检测识别。本发明可以运用于大视野条件下,车辆脸部和车牌可能出现的区域更大,现场的原始图片包含大比例的背景区域,直接将高清原始现场图片送入训练好的车辆前脸识别模型,会导致车辆识别效率低,识别延时大。因为车辆脸部属于大物体,在低分辨率图像中也可以以高准确率识别出。因此通过压缩原始图像得到小尺寸现场图像可以加快车辆脸部的识别速度并且不影响识别准确度。车牌区域只占整个图片的极小部分,属于小物体,因此将整张现场图片送入车牌识别模型,会带来不必要的开销。同时,由于车牌区域较小,车牌文字信息的ocr识别要求车牌区域有较高的分辨率。本发明使用车脸前脸识别模型在小尺寸现场图像中识别并定位车脸前脸区域,根据映射关系,在原始高清图像中裁剪出前脸区域,对高清车脸前脸区域使用车牌识别模型,确定车牌的准确位置,并裁剪,将得到的车牌区域图像送入ocr识别模型得到最终的车牌文字识别结果。本发明可以满足实时识别和准确识别的要求,在大视野条件下,对运动中车辆的车牌进行识别,具有较高的准确率和较强的鲁棒性。本发明克服了传统车牌识别技术需要在车辆运动相对较慢或静止的条件下进行近距离(1-2m)的车牌识别方法,应用于大视野条件下车辆快速运动时对于车牌的远距离精准实时检测。
39、进一步的,在模型训练过程中,本发明利用imgaug图像数据增强库对现场图像数据进行扩增,获得多种角度、亮度、雨雪环境下的图像数据,相比于仅用现场图像数据进行训练得到的检测模型泛化能力强,鲁棒性高。
- 还没有人留言评论。精彩留言会获得点赞!