基于图像数据处理的运动控制视觉校准系统的制作方法
本发明涉及数据处理领域,具体涉及基于图像数据处理的运动控制视觉校准系统。
背景技术:
1、随着工业自动化和机器人技术的不断发展,运动控制系统在零件加工产业中的应用越来越广泛。然而,由于制造过程中的各种因素,运动控制系统可能会出现误差,这会影响到制造精度和质量。视觉校准是指对机器视觉系统进行校准,以确保其准确性和可靠性,机器视觉系统在运行过程中,可能会受到各种因素的影响,例如摄像头畸变、光照条件等,这些因素可能会导致系统的测量结果出现误差。因此,对运动控制系统进行校准以确保其准确性是非常重要的。
2、因此,如何提高图像采集的准确性和可靠性以及排除零件加工过程各种因素的影响,进而提高了零件生产效率和产品质量是本发明的关键。
技术实现思路
1、为了克服上述的技术问题,本发明的目的在于提供基于图像数据处理的运动控制视觉校准系统,解决了现有的运动控制系统的图像采集准确性和可靠性不高,无法排除各种因素对运动控制的影响,这会影响到制造精度和质量的问题。
2、本发明的目的可以通过以下技术方案实现:
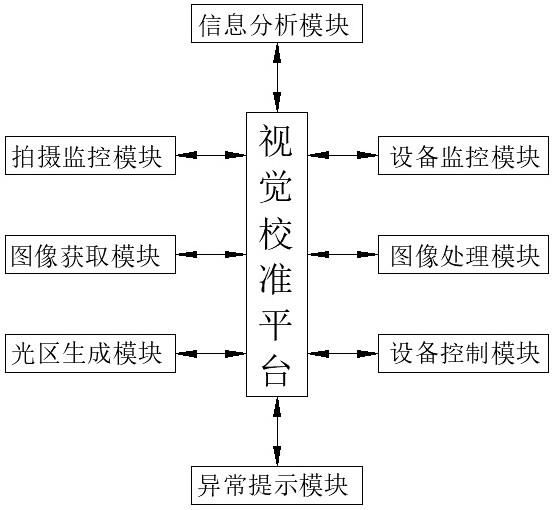
3、基于图像数据处理的运动控制视觉校准系统,包括:
4、拍摄监控模块,用于对高清摄像头进行监测,获取镜头稳定参数,并将镜头稳定参数发送至信息分析模块;其中,镜头稳定参数包括灰尘值、抖动值;
5、所述拍摄监控模块获取镜头稳定参数的具体过程如下:
6、获取高清摄像头的镜头上灰尘数量,并将其标记为尘数值,并用符号cs表示,获取镜头上各处的灰尘厚度,并将其标记为尘厚值,获取最大的尘厚值和最小的尘厚值之间的差值,并将其标记为差厚值,并用符号ch表示,将尘厚值、厚差值进行量化处理,提取尘厚值、厚差值的数值,依据公式得到灰尘值,并用符号hc表示,其中,π为数学常数,h1、h2分别为尘厚值、厚差值对应的预设比例系数,h1、h2满足h1+h2=1,0<h2<h1<1,取h1=0.64,h2=0.36;
7、获取高清摄像头的镜头单位时间内的抖动次数,并将其标记为抖次值,并用符号dc表示,获取镜头单位时间内抖动形成的路径长度,并将其标记为径长值,并用符号jc表示,将抖次值、径长值进行量化处理,提取抖次值、径长值的数值,依据公式得到抖动值,并用符号dd表示,其中,π为数学常数,d1、d2分别为抖次值、径长值对应的预设比例系数,d1、d2满足d1+d2=1,0<d1<d2<1,取d1=0.42,d2=0.58;
8、将灰尘值、抖动值发送至信息分析模块;
9、信息分析模块,用于根据镜头稳定参数获得镜头稳定系数,并将镜头稳定系数发送至视觉校准平台;
10、视觉校准平台,用于根据镜头稳定系数生成镜头异常指令或者光区生成指令,并将镜头异常指令发送至异常提示模块,将光区生成指令发送至光区生成模块;
11、光区生成模块,用于接收到光区生成指令后形成光照区域,同时生成零件输入指令,并将零件输入指令发送至设备控制模块。
12、作为本发明进一步的方案:所述信息分析模块获得镜头稳定系数的具体过程如下:
13、将灰尘值、抖动值进行量化处理,提取灰尘值、抖动值的数值,依据公式得到镜头稳定系数,并用符号jw表示,其中,e为数学常数,w1、w2分别为灰尘值、抖动值对应的预设权重因子,w1、w2满足w1>w2>1.057,取w1=1.65,w2=1.28;
14、将镜头稳定系数发送至视觉校准平台。
15、作为本发明进一步的方案:所述视觉校准平台生成镜头异常指令或者光区生成指令的具体过程如下:
16、将镜头稳定系数与预设的镜头稳定阈值进行比较,其中,将镜头稳定阈值用符号jwy表示,比较结果如下:
17、如果jw≥jwy,则生成镜头异常指令,并将镜头异常指令发送至异常提示模块;
18、如果jw<jwy,则生成光区生成指令,并将光区生成指令发送至光区生成模块。
19、作为本发明进一步的方案:该运动控制视觉校准系统,还包括:
20、图像处理模块,用于根据定位视频获得移动路线,并将移动路线发送至设备控制模块;还用于接收到图像分析指令后获取加工位置,并将加工位置发送至设备控制模块。
21、作为本发明进一步的方案:所述图像处理模块获取加工位置的具体过程如下:
22、接收到图像分析指令后获取待加工的零件的边缘轮廓与光照区域的边缘轮廓的交点数量,并将其标记为交数值,并用符号js表示;
23、获取待加工的零件位于光照区域内部分的面积,并将其标记为内面值,并用符号nm表示;
24、获取待加工的零件位于光照区域外部分的面积,并将其标记为外面值,并用符号wm表示;
25、将交数值、内面值以及外面值进行量化处理,提取交数值、内面值以及外面值的数值,依据公式得到重合系数,并用符号ch表示,其中,k1、k2以及k3分别为交数值、内面值以及外面值对应的预设比例系数,k1、k2以及k3满足k1+k2+k3=1,0<k1<k3<k2<1,取k1=0.25,k2=0.39,k3=0.36;
26、从零件加工台上随机选择一个位置设置为参考点,从参考点开始旋转并重新回到参考点为止,获取旋转过程中重合系数的变化曲线,获取变化曲线出现峰值时零件加工台上参考点所在位置,并将其标记为加工位置,并将加工位置发送至设备控制模块。
27、作为本发明进一步的方案:该运动控制视觉校准系统,还包括:
28、设备监控模块,用于接收到设备监控指令后对加工刀具进行监测,获取设备稳定参数,并将设备稳定参数发送至信息分析模块;其中,设备稳定参数包括移速值、幅音值。
29、作为本发明进一步的方案:所述设备监控模块获取设备稳定参数的具体过程如下:
30、接收到设备监控指令后实时获取加工刀具移动过程中的移动速度,并将其标记为移速值,获取最大的移速值和最小的移速值两者之间的差值,并将其标记为差速值,并用符号cy表示,获取加工刀具移动过程中的平均移动速度,并将其标记为均速值,获取预设的移动速度参数,获取均速值和预设的移动速度参数两者之间的差值,并将其标记为差均值,并用符号cj表示,将差速值、差均值进行量化处理,提取差速值、差均值的数值,依据公式得到移速值,并用符号ys表示,其中,c1、c2分别为差速值、差均值对应的预设比例系数,c1、c2满足c1+c2=1,0<c1<c2<1,取c1=0.30,c2=0.70;
31、获取加工刀具移动过程中的最大的振动幅度和最大的噪音声音强度,并将其分别标记为振幅值和噪音值,并分别用符号zf、zy表示,将振幅值、噪音值进行量化处理,提取振幅值、噪音值的数值,依据公式得到幅音值,并用符号fy表示,其中,z1、z2分别为振幅值、噪音值对应的预设比例系数,z1、z2满足z1+z2=1,0<z2<z1<1,取z1=0.77,z2=0.23;
32、将移速值、幅音值发送至信息分析模块。
33、作为本发明进一步的方案:所述信息分析模块还用于根据设备稳定参数获得设备稳定系数,并将设备稳定系数发送至视觉校准平台。
34、作为本发明进一步的方案:所述信息分析模块获得设备稳定系数的具体过程如下:
35、将移速值、幅音值进行量化处理,提取移速值、幅音值的数值,依据公式得到设备稳定系数,并用符号sw表示,其中,e为数学常数,f1、f2分别为移速值、幅音值对应的预设权重因子,f1、f2满足f2>f1>2.315,取f1=2.51,f2=2.97;
36、将设备稳定系数发送至视觉校准平台。
37、作为本发明进一步的方案:所述视觉校准平台还用于根据设备稳定系数生成设备异常指令或者零件加工指令,并将设备异常指令发送至异常提示模块,将零件加工指令发送至设备控制模块。
38、作为本发明进一步的方案:所述视觉校准平台生成设备异常指令或者零件加工指令的具体过程如下:
39、将设备稳定系数与预设的设备稳定阈值进行比较,其中,将设备稳定阈值用符号swy表示,比较结果如下:
40、如果sw≥swy,则生成设备异常指令,并将设备异常指令发送至异常提示模块;
41、如果sw<swy,则生成零件加工指令,并将零件加工指令发送至设备控制模块。
42、作为本发明进一步的方案:该运动控制视觉校准系统,还包括:
43、设备控制模块,用于接收到零件输入指令后将待加工的零件放置于零件加工台上,同时生成图像获取指令,并将图像获取指令发送至图像获取模块;还用于控制零件加工台按照移动路线移动,待移动点与固定点重合,之后控制零件加工台旋转,同时生成图像分析指令,并将图像分析指令发送至图像处理模块;还用于控制零件加工台旋转,使得从参考点开始旋转至加工位置为止,控制零件加工设备移动,同时生成设备监控指令,并将设备监控指令发送至设备监控模块;还用于接收到零件加工指令后控制零件加工设备上的加工刀具对待加工的零件进行加工。
44、作为本发明进一步的方案:该运动控制视觉校准系统,还包括:
45、图像获取模块,用于接收到图像获取指令对光照区域进行拍摄,获得定位视频,并将定位视频发送至图像处理模块。
46、作为本发明进一步的方案:该运动控制视觉校准系统,还包括:
47、异常提示模块,用于接收到镜头异常指令后响起镜头异常提示铃声;还用于接收到设备异常指令后响起设备异常提示铃声。
48、本发明的有益效果:
49、本发明的基于图像数据处理的运动控制视觉校准系统,通过拍摄监控模块对高清摄像头进行监测,获取镜头稳定参数,通过信息分析模块根据镜头稳定参数获得镜头稳定系数,通过视觉校准平台根据镜头稳定系数生成镜头异常指令或者光区生成指令,通过光区生成模块接收到光区生成指令后形成光照区域;该运动控制视觉校准系统首先获取镜头稳定参数,根据镜头稳定参数获得的镜头稳定系数能够综合衡量高清摄像头的拍摄稳定情况,且镜头稳定系数越大表示稳定情况越差,高清摄像头的镜头出现异常易于对图像采集造成不利影响,并进行提示,还在镜头稳定系数满足图像采集的要求后形成光照区域,光照区域时刻保持相同状态,避免环境中的光源情况对零件的图像采集造成差异,能够获得的零件图像外因影响小,提高对零件质量分析的精准度;
50、通过设备控制模块将待加工的零件放置于零件加工台上,通过图像获取模块对光照区域进行拍摄,获得定位视频,通过图像处理模块根据定位视频获得移动路线,通过设备控制模块控制零件加工台按照移动路线移动,待移动点与固定点重合,之后控制零件加工台旋转,通过图像处理模块获取加工位置,通过设备控制模块控制零件加工台旋转,使得从参考点开始旋转至加工位置为止,控制零件加工设备移动,通过设备监控模块对加工刀具进行监测,获取设备稳定参数,通过信息分析模块根据设备稳定参数获得设备稳定系数,通过视觉校准平台根据设备稳定系数生成设备异常指令或者零件加工指令,通过设备控制模块接收到零件加工指令后控制零件加工设备上的加工刀具对待加工的零件进行加工;该运动控制视觉校准系统通过具有相同轮廓的光照区域对待加工的零件进行调整,利用重合系数对待加工的零件的放置状态进行衡量,且重合系数越大表示放置位置越佳,使得每个待加工的零件均能以相同且最佳的位置放置于零件加工台上进行加工,之后对加工刀具进行监测,获取设备稳定参数,根据设备稳定参数获得的设备稳定系数能够综合衡量加工刀具的稳定情况,且设备稳定系数越高表示稳定情况越差,越易于后续对零件加工时出现大量的不合格零件,在设备稳定系数达到零件加工要求后再对零件进行加工,提高了零件生产效率和产品质量;
51、本发明的基于图像数据处理的运动控制视觉校准系统能够保证图像采集的准确性和可靠性,还利用图像数据处理从而排除零件加工过程中的各种因素的影响,提高了零件生产效率和产品质量。
- 还没有人留言评论。精彩留言会获得点赞!