地图更新方法、装置及电子设备与流程
本公开涉及人工智能,尤其涉及自动驾驶、深度学习、云计算、智能交通、计算机视觉等,尤其涉及一种地图更新方法、装置及电子设备。
背景技术:
1、目前,在点云制图流程中,需要对采集的多个点云数据之间进行配准,然后才能融合得到点云地图,进而得到三维高精地图,用于在自动驾驶时辅助感知和定位。
2、其中,若确定三维高精地图后,存在新采集的点云数据,则需要重新基于所有点云数据确定新的点云地图,并基于新的点云地图对三维高精地图进行调偏处理。上述方案中,需要对所有点云数据进行重复配准处理,数据处理量大,处理效率差。
技术实现思路
1、本公开提供了一种地图更新方法、装置及电子设备。
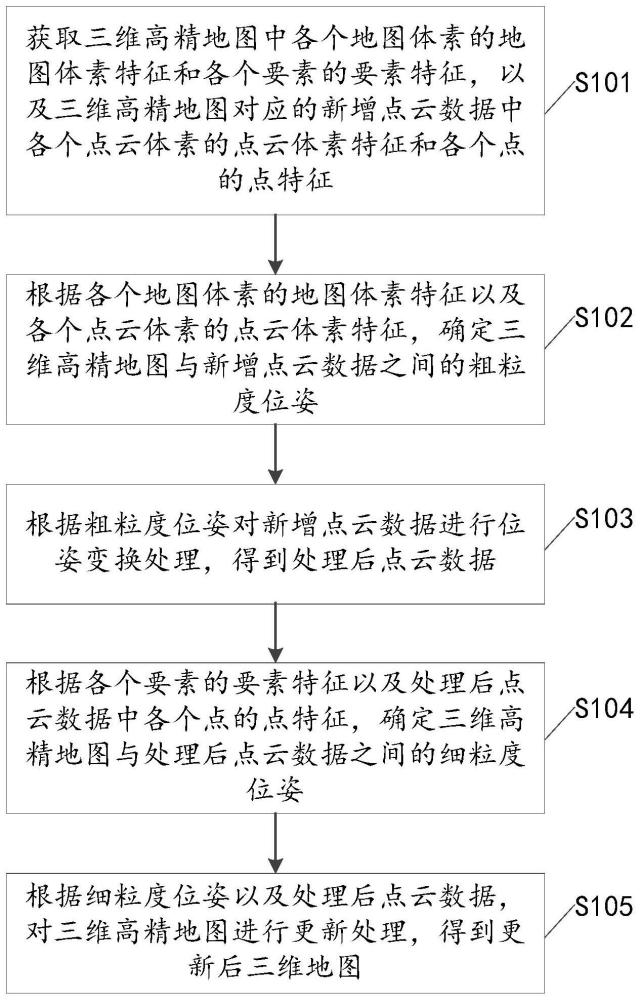
2、根据本公开的一方面,提供了一种地图更新方法,所述方法包括:获取三维高精地图中各个地图体素的地图体素特征和各个要素的要素特征,以及所述三维高精地图对应的新增点云数据中各个点云体素的点云体素特征和各个点的点特征;根据各个地图体素的地图体素特征以及各个点云体素的点云体素特征,确定所述三维高精地图与所述新增点云数据之间的粗粒度位姿;根据所述粗粒度位姿对所述新增点云数据进行位姿变换处理,得到处理后点云数据;根据各个要素的要素特征以及所述处理后点云数据中各个点的点特征,确定所述三维高精地图与所述处理后点云数据之间的细粒度位姿;根据所述细粒度位姿以及所述处理后点云数据,对所述三维高精地图进行更新处理,得到更新后三维地图。
3、根据本公开的另一方面,提供了一种地图更新装置,所述装置包括:第一获取模块,用于获取三维高精地图中各个地图体素的地图体素特征和各个要素的要素特征,以及所述三维高精地图对应的新增点云数据中各个点云体素的点云体素特征和各个点的点特征;第一确定模块,用于根据各个地图体素的地图体素特征以及各个点云体素的点云体素特征,确定所述三维高精地图与所述新增点云数据之间的粗粒度位姿;第一处理模块,用于根据所述粗粒度位姿对所述新增点云数据进行位姿变换处理,得到处理后点云数据;第二确定模块,用于根据各个要素的要素特征以及所述处理后点云数据中各个点的点特征,确定所述三维高精地图与所述处理后点云数据之间的细粒度位姿;第二处理模块,用于根据所述细粒度位姿以及所述处理后点云数据,对所述三维高精地图进行更新处理,得到更新后三维地图。
4、根据本公开的另一方面,提供了一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本公开上述提出的地图更新方法。
5、根据本公开的另一方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使计算机执行本公开上述提出的地图更新方法。
6、根据本公开的另一方面,提供了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现本公开上述提出的地图更新方法的步骤。
7、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种地图更新方法,所述方法包括:
2.根据权利要求1所述的方法,其中,所述获取三维高精地图中各个地图体素的地图体素特征和各个要素的要素特征,以及所述三维高精地图对应的新增点云数据中各个点云体素的点云体素特征和各个点的点特征,包括:
3.根据权利要求1所述的方法,其中,在根据所述粗粒度位姿、各个要素的要素特征以及各个点的点特征,确定所述三维高精地图与所述新增点云数据之间的细粒度位姿之前,所述方法还包括:
4.根据权利要求1或3所述的方法,其中,所述根据各个地图体素的地图体素特征以及各个点云体素的点云体素特征,确定所述三维高精地图与所述新增点云数据之间的粗粒度位姿,包括:
5.根据权利要求4所述的方法,其中,所述根据所述配对关系,确定所述三维高精地图与所述新增点云数据之间的粗粒度位姿,包括:
6.根据权利要求1所述的方法,其中,所述根据各个要素的要素特征以及所述处理后点云数据中各个点的点特征,确定所述三维高精地图与所述处理后点云数据之间的细粒度位姿,包括:
7.根据权利要求1所述的方法,其中,所述根据所述细粒度位姿以及所述处理后点云数据,对所述三维高精地图进行更新处理,得到更新后三维地图,包括:
8.根据权利要求1或7所述的方法,其中,若所述三维高精地图是根据二维高精地图以及预设高度确定得到的;
9.根据权利要求1所述的方法,其中,若所述三维高精地图是根据二维高精地图以及预设高度确定得到的;
10.一种地图更新装置,所述装置包括:
11.根据权利要求10所述的装置,其中,所述第一获取模块具体用于,
12.根据权利要求10所述的装置,其中,所述装置还包括:第二获取模块、第三处理模块和第四处理模块;
13.根据权利要求10或12所述的装置,其中,所述第一确定模块包括,第一确定单元和第二确定单元;
14.根据权利要求13所述的装置,其中,所述第二确定单元具体用于,
15.根据权利要求10所述的装置,其中,所述第二确定模块具体用于,
16.根据权利要求10所述的装置,其中,所述第二处理模块具体用于,
17.根据权利要求10或16所述的装置,其中,若所述三维高精地图是根据二维高精地图以及预设高度确定得到的;所述装置还包括:投影处理模块,用于对所述更新后三维地图进行投影处理,得到所述二维高精地图对应的更新后二维地图。
18.根据权利要求10所述的装置,其中,若所述三维高精地图是根据二维高精地图以及预设高度确定得到的;所述第二处理模块具体用于,
19.一种电子设备,包括:
20.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1至9中任一项所述的地图更新方法。
21.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1至9中任一项所述的地图更新方法。
技术总结
本公开提供了地图更新方法、装置及电子设备,涉及人工智能技术领域,尤其涉及自动驾驶、深度学习、云计算、智能交通、计算机视觉等技术领域。具体实现方案为:根据三维高精地图中各个地图体素的地图体素特征,以及三维高精地图对应的新增点云数据中各个点云体素的点云体素特征,确定三维高精地图与新增点云数据之间的粗粒度位姿;进而对新增点云数据进行位姿变换处理;根据得到的处理后点云数据中各个点的点特征以及三维高精地图中各个要素的要素特征,确定细粒度位姿;进而对三维高精地图进行更新处理,从而能够基于体素特征等来实现新增点云数据与三维高精地图之间的准确配准,避免对历史点云数据进行重复配准处理,提高地图更新效率。
技术研发人员:曲旭中,万国伟,白宇
受保护的技术使用者:北京百度网讯科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!