一种车辆的智能驾驶场景处理方法、系统及终端与流程
本技术涉及智能驾驶,尤其涉及一种车辆的智能驾驶场景处理方法、系统、终端及计算机可读存储介质。
背景技术:
1、随着汽车的快速发展,汽车的智能驾驶也得到快速发展;而智能驾驶需要在不同的驾驶场景进行训练及测试,从而在对应的驾驶场景下及时进行准确的决策,但车辆常常在面对极端场景时无法进行准确的决策,导致安全事故,这是因为在对车辆的智能驾驶进行训练和测试的过程中仅仅考虑了有限的场景,从而导致场景泛化能力不足;因此,对于智能驾驶系统而言,如何快速、准确地获取并处理道路描述文件和目标车辆信息,进行场景泛化和极端用例场景判断十分关键。
2、因此,现有技术还有待于改进和发展。
技术实现思路
1、本技术的主要目的在于提供一种车辆的智能驾驶场景处理方法、系统、终端及计算机可读存储介质,旨在解决现有的智能驾驶系统的场景泛化能力较低,无法准确的判断出极端用例场景的问题。
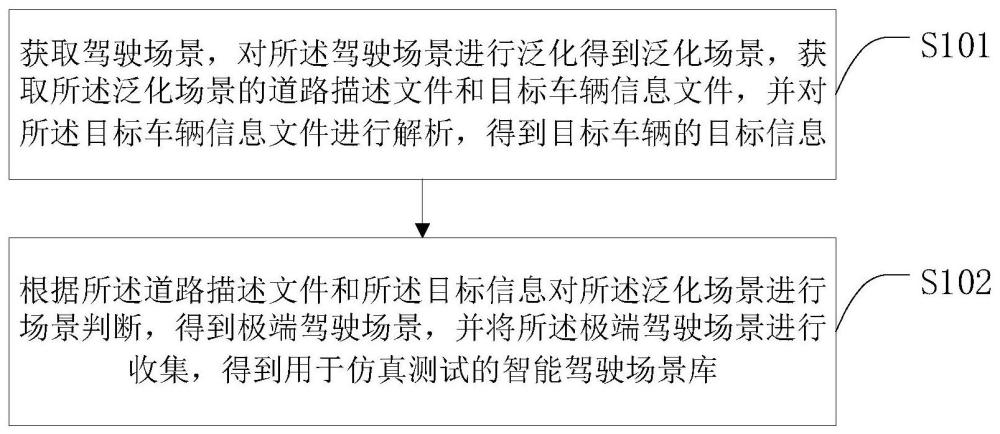
2、本技术第一方面实施例提供一种车辆的智能驾驶场景处理方法,包括以下步骤:获取驾驶场景,对所述驾驶场景进行泛化得到泛化场景,获取所述泛化场景的道路描述文件和目标车辆信息文件,并对所述目标车辆信息文件进行解析,得到目标车辆的目标信息;根据所述道路描述文件和所述目标信息对所述泛化场景进行场景判断,得到极端驾驶场景,并将所述极端驾驶场景进行收集,得到用于仿真测试的智能驾驶场景库。
3、根据上述技术手段,本技术实施例可以通过收集合适的场景库数据,枚举关联参数对收集的场景进行泛化,得到大量的泛化场景,并获取泛化场景中的道路描述文件和目标车辆信息文件;对道路描述文件进行解析得到目标车辆的目标信息,通过使用rss安全距离模型对泛化场景进行判断,得到极端驾驶场景,并将得到的极端驾驶场景进行收集,形成智能驾驶场景库,以便于后续对智能驾驶模式进行相应的测试、评估等用途,并且所述智能驾驶场景库可以进行动态更新及管理,以不断提升智能驾驶场景的泛化能力。
4、可选地,在本技术的一个实施例中,所述获取驾驶场景,对所述驾驶场景进行泛化得到泛化场景,获取所述泛化场景的道路描述文件和目标车辆信息文件,具体包括:获取已存在的驾驶场景及关联参数,根据所述关联参数对所述驾驶场景进行泛化,得到泛化场景;根据第一预设格式获取所述泛化场景的道路描述文件,并根据第二预设格式获取所述泛化场景的目标车辆信息文件。
5、根据上述技术手段,本技术实施例通过在已有的场景库中收集合适的场景库数据,枚举关联参数对收集的场景进行泛化,得到大量的泛化场景,以便于更好的模拟出真实的交通状况中发生的场景;然后获取泛化场景的道路描述文件,即描述了模拟真实场景里的静态内容,并可根据自定义数据进行拓展,及泛化场景的目标车辆信息文件,即定义了模拟真实场景的动态内容;通过批量获取道路描述文件和目标车辆信息文件,以便于后续输入rss安全距离模型中进行判断。
6、可选地,在本技术的一个实施例中,所述对所述目标车辆信息文件进行解析,得到目标车辆的目标信息,具体包括:获取所述目标车辆信息文件的目标车辆、初始化要素、场景内容和动作集,根据面向对象编程对所述初始化要素、所述场景内容和所述动作集进行处理,得到所述目标车辆的点轨迹;获取所述点轨迹的直角坐标,对所述直角坐标进行转化得到经纬度坐标,并基于所述经纬度坐标得到所述点轨迹的经纬度信息;提取所述目标车辆对应的配置文件路径,根据所述经纬度信息和所述配置文件路径得到所述目标车辆的目标信息。
7、根据上述技术手段,本技术实施例在得到目标车辆信息文件后,需要对所述目标车辆信息文件进行解析,获取所述目标车辆信息文件的目标车辆、初始化要素、场景内容和动作集,根据面向对象编程对所述初始化要素、所述场景内容和所述动作集进行处理,得到所述目标车辆的点轨迹;然后获取所述点轨迹的直角坐标,对所述直角坐标进行转化得到经纬度坐标,并基于所述经纬度坐标得到所述点轨迹的经纬度信息;提取所述目标车辆对应的配置文件路径,根据所述经纬度信息和所述配置文件路径得到所述目标车辆的目标信息,通过高效的解析算法来进行解析,能够更加高效得到目标车辆的目标信息。
8、可选地,在本技术的一个实施例中,所述目标信息包括目标车辆轨迹信息和速度信息。
9、根据上述技术手段,本技术实施例通过对目标车辆信息文件进行解析,得到相应的目标车辆轨迹信息和速度信息,以便于后续更加精准的判断出极端驾驶场景。
10、可选地,在本技术的一个实施例中,所述根据所述道路描述文件和所述目标信息对所述泛化场景进行场景判断,得到极端驾驶场景,并将所述极端驾驶场景进行收集,得到用于仿真测试的智能驾驶场景库,具体包括:获取驾驶员信息和初始车辆动力学信息,并创建责任敏感安全模型;将所述驾驶员信息、所述初始车辆动力学信息、所述道路描述文件和所述目标信息输入至所述责任敏感安全模型,得到所述目标车辆的位置信息、运动学参数和横纵向距离;根据所述位置信息、所述运动学参数和所述横纵向距离对所述泛化场景进行场景判断,得到多个极端驾驶场景,并将所述极端驾驶场景进行收集,得到用于仿真测试的智能驾驶场景库。
11、根据上述技术手段,本技术实施例通过使用rss安全距离模型,即责任敏感安全模型来对泛化场景进行判断,确定哪些泛化场景为极端驾驶场景,以便于进行相关的仿真测试,通过获取驾驶员信息和初始车辆动力学信息,并创建责任敏感安全模型;将所述驾驶员信息、所述初始车辆动力学信息、所述道路描述文件和所述目标信息输入至所述责任敏感安全模型,得到所述目标车辆的位置信息、运动学参数和横纵向距离;根据所述位置信息、所述运动学参数和所述横纵向距离对所述泛化场景进行场景判断,得到极端驾驶场景;目的是为了对已经泛化后的智能驾驶场景进行过滤,得到所需要的极端驾驶场景;并将每个所述极端驾驶场景进行收集,得到用于仿真测试的智能驾驶场景库,以便于之后运用智能驾驶场景库进行仿真测试,提高智能驾驶系统的安全性,智能驾驶场景库可以进行动态更新及管理,以不断提升系统的场景泛化能力。
12、可选地,在本技术的一个实施例中,所述将所述驾驶员信息、所述初始车辆动力学信息、所述道路描述文件和所述目标信息输入至所述责任敏感安全模型,得到所述目标车辆的位置信息、运动学参数和横纵向距离,具体包括:将所述初始动力学信息、所述道路描述文件和所述目标信息进行初始化,得到初始化信息;根据所述初始化信息创建目标场景,并获取世界模型;基于所述世界模型对所述目标场景进行处理,得到处理结果,并根据所述处理结果获取所述目标车辆的位置信息、运动学参数和横纵向距离。
13、根据上述技术手段,本技术实施例可以将所述初始动力学信息、所述道路描述文件和所述目标信息进行初始化,得到初始化信息;根据所述初始化信息创建目标场景,并获取世界模型;基于所述世界模型对所述目标场景进行处理,得到处理结果,并根据所述处理结果获取所述目标车辆的位置信息、运动学参数和横纵向距离,通过位置信息、运动学参数和横纵向距离来更加准确的判断哪些泛化场景为极端驾驶场景。
14、可选地,在本技术的一个实施例中,所述根据所述位置信息、所述运动学参数和所述横纵向距离对所述泛化场景进行场景判断,得到极端驾驶场景,具体包括:根据所述位置信息判断所述横纵向距离是否大于预设安全距离;若所述横纵向距离大于预设安全距离,则判断所述运动学参数的信息是否危险;若所述运动学参数的信息危险,则确定所述泛化场景为极端驾驶场景。
15、根据上述技术手段,本技术实施例可以根据所述位置信息判断所述横纵向距离是否大于预设安全距离;若所述横纵向距离为预设安全距离,则将所述泛化场景进行去除,以便于减少非极端驾驶场景的干扰;若所述横纵向距离大于预设安全距离,则判断所述运动学参数的信息是否危险;若所述运动学参数的信息危险,则确定所述泛化场景为极端驾驶场景,以便于更加准确的确定极端驾驶场景,提高了智能驾驶系统的场景泛化能力。
16、本技术第二方面实施例提供一种车辆的智能驾驶场景处理系统,所述车辆的智能驾驶场景处理系统包括:泛化解析模块,用于获取驾驶场景,对所述驾驶场景进行泛化得到泛化场景,获取所述泛化场景的道路描述文件和目标车辆信息文件,并对所述目标车辆信息文件进行解析,得到目标车辆的目标信息;驾驶场景判断模块,用于根据所述道路描述文件和所述目标信息对所述泛化场景进行场景判断,得到极端驾驶场景,并将所述极端驾驶场景进行收集,得到用于仿真测试的智能驾驶场景库。
17、可选地,在本技术的一个实施例中,所述泛化解析模块包括:场景泛化单元,用于获取已存在的驾驶场景及关联参数,根据所述关联参数对所述驾驶场景进行泛化,得到泛化场景;文件获取单元,用于根据第一预设格式获取所述泛化场景的道路描述文件,并根据第二预设格式获取所述泛化场景的目标车辆信息文件;信息处理单元,用于获取所述目标车辆信息文件的目标车辆、初始化要素、场景内容和动作集,根据面向对象编程对所述初始化要素、所述场景内容和所述动作集进行处理,得到所述目标车辆的点轨迹;文件解析单元,用于获取所述点轨迹的直角坐标,对所述直角坐标进行转化得到经纬度坐标,并基于所述经纬度坐标得到所述点轨迹的经纬度信息;数据提取单元,用于提取所述目标车辆对应的配置文件路径,根据所述经纬度信息和所述配置文件路径得到所述目标车辆的目标信息。
18、可选地,在本技术的一个实施例中,所述驾驶场景判断模块包括:模型创建单元,用于获取驾驶员信息和初始车辆动力学信息,并创建责任敏感安全模型;数据处理子模块,用于将所述驾驶员信息、所述初始车辆动力学信息、所述道路描述文件和所述目标信息输入至所述责任敏感安全模型,得到所述目标车辆的位置信息、运动学参数和横纵向距离;场景判断子模块,用于根据所述位置信息、所述运动学参数和所述横纵向距离对所述泛化场景进行场景判断,得到极端驾驶场景,并将所述极端驾驶场景进行收集,得到用于仿真测试的智能驾驶场景库。
19、可选地,在本技术的一个实施例中,所述数据处理子模块包括:数据初始化单元,用于将所述初始动力学信息、所述道路描述文件和所述目标信息进行初始化,得到初始化信息;场景创建单元,用于根据所述初始化信息创建目标场景,并获取世界模型;结果处理单元,用于基于所述世界模型对所述目标场景进行处理,得到处理结果,并根据所述处理结果获取所述目标车辆的位置信息、运动学参数和横纵向距离。
20、可选地,在本技术的一个实施例中,所述场景判断子模块包括:第一判断单元,用于根据所述位置信息判断所述横纵向距离是否大于预设安全距离;第二判断单元,用于若所述横纵向距离大于预设安全距离,则判断所述运动学参数的信息是否危险;场景确定单元,用于若所述运动学参数的信息危险,则确定所述泛化场景为极端驾驶场景。
21、本技术第三方面实施例提供一种终端,所述终端包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆的智能驾驶场景处理程序,所述车辆的智能驾驶场景处理程序被所述处理器执行时实现如上述实施例所述的车辆的智能驾驶场景处理方法的步骤。
22、本技术第四方面实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有车辆的智能驾驶场景处理程序,所述车辆的智能驾驶场景处理程序被处理器执行时实现如上述实施例所述的车辆的智能驾驶场景处理方法的步骤。
23、本技术的有益效果:
24、(1)本技术实施例可以通过收集合适的场景库数据,枚举关联参数对收集的场景进行泛化,得到大量的泛化场景,并获取泛化场景中的道路描述文件和目标车辆信息文件;对道路描述文件进行解析得到目标车辆的目标信息,通过使用rss安全距离模型对泛化场景进行判断,得到多个极端驾驶场景,并将得到的极端驾驶场景进行收集,形成智能驾驶场景库,以便于后续对智能驾驶模式进行相应的测试、评估等用途,并且所述智能驾驶场景库可以进行动态更新及管理,以不断提升智能驾驶场景的泛化能力。
25、(2)本技术实施例在得到目标车辆信息文件后,需要对所述目标车辆信息文件进行解析,获取所述目标车辆信息文件的目标车辆、初始化要素、场景内容和动作集,根据面向对象编程对所述初始化要素、所述场景内容和所述动作集进行处理,得到所述目标车辆的点轨迹;然后获取所述点轨迹的直角坐标,对所述直角坐标进行转化得到经纬度坐标,并基于所述经纬度坐标得到所述点轨迹的经纬度信息,并提取所述目标车辆对应的配置文件路径,根据所述经纬度信息和所述配置文件路径得到所述目标车辆的目标信息,通过高效的解析算法来进行解析,能够更加高效得到目标车辆的目标信息。
26、(3)本技术实施例在通过使用rss安全距离模型,即责任敏感安全模型来对泛化场景进行判断,确定哪些泛化场景为极端驾驶场景,以便于进行相关的仿真测试,通过获取驾驶员信息和初始车辆动力学信息,并创建责任敏感安全模型;将所述驾驶员信息、所述初始车辆动力学信息、所述道路描述文件和所述目标信息输入至所述责任敏感安全模型,得到所述目标车辆的位置信息、运动学参数和横纵向距离;根据所述位置信息、所述运动学参数和所述横纵向距离对所述泛化场景进行场景判断,得到极端驾驶场景;目的是为了对已经泛化后的智能驾驶场景进行过滤,得到所需要的极端驾驶场景;并将每个所述极端驾驶场景进行收集,得到用于仿真测试的智能驾驶场景库,以便于之后运用智能驾驶场景库进行仿真测试,提高智能驾驶系统的安全性,智能驾驶场景库可以进行动态更新及管理,以不断提升系统的场景泛化能力。
27、(4)本技术实施例可以将所述初始动力学信息、所述道路描述文件和所述目标信息进行初始化,得到初始化信息;根据所述初始化信息创建目标场景,并获取世界模型;基于所述世界模型对所述目标场景进行处理,得到处理结果,并根据所述处理结果获取所述目标车辆的位置信息、运动学参数和横纵向距离,通过位置信息、运动学参数和横纵向距离来更加准确的判断哪些泛化场景为极端驾驶场景。
28、(5)本技术实施例可以根据所述位置信息判断所述横纵向距离是否大于预设安全距离;若所述横纵向距离为预设安全距离,则将所述泛化场景进行去除,以便于减少非极端驾驶场景的干扰;若所述横纵向距离大于预设安全距离,则判断所述运动学参数的信息是否危险;若所述运动学参数的信息危险,则确定所述泛化场景为极端驾驶场景,以便于更加准确的确定极端驾驶场景,提高了智能驾驶系统的场景泛化能力。
29、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!