一种精准可视化TMS物流运输管理系统的制作方法
本发明涉及物流运输管理,具体涉及一种精准可视化tms物流运输管理系统。
背景技术:
1、tms物流运输管理系统适用于各物流运输公司,以及各企业下的仓储物流部门,运输管理系统通过对驾驶时间、行驶里程数、线路计划、车辆管理和调度执行的处理与操作,能够编制最优的路线计划和排程,有助于降低运输相关成本,确保配送任务按进度完成,保证交货准时性,减少线路计划和调度工作的人工干预。
2、然而,现有的tms物流运输管理系统不能对运输车辆进行精准的定位监控,使得调度员不便对运输路线进行灵活调整,从而无法有效避免出现送货延误的情况。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术所存在的上述缺点,本发明提供了一种精准可视化tms物流运输管理系统,能够有效克服现有技术所存在的不能对运输车辆进行精准定位监控的缺陷。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
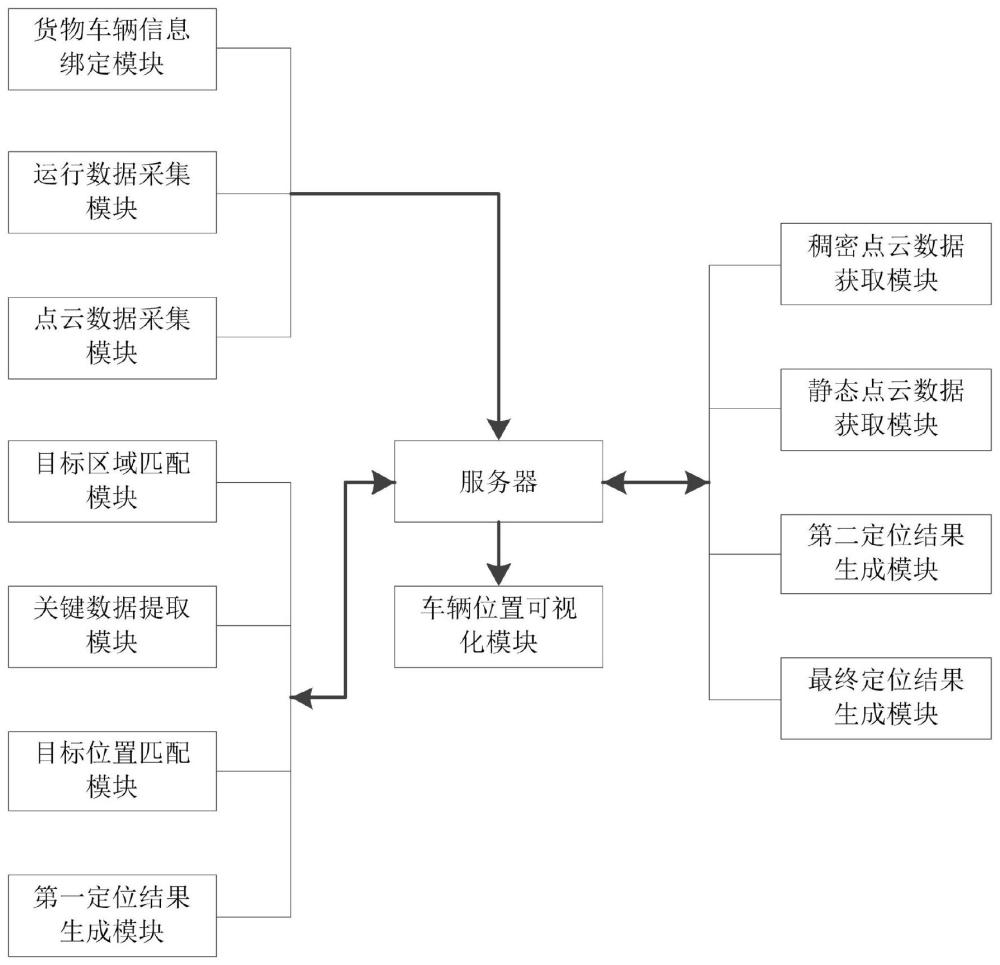
5、一种精准可视化tms物流运输管理系统,包括服务器,所述服务器通过货物车辆信息绑定模块对运输车辆及其运输货物进行信息绑定,并利用运行数据采集模块实时采集表征运输车辆行驶过程中地理位置和周围环境的运行数据,所述服务器通过目标区域匹配模块对运行数据与预设地图进行匹配,得到表征运输车辆在预设地图中目标区域的粗略匹配结果,并利用关键数据提取模块从粗略匹配结果中提取具有指示性的关键数据,所述服务器通过目标位置匹配模块对运行数据与关键数据进行匹配,得到表征运输车辆在目标区域中目标位置的精确匹配结果,并利用第一定位结果生成模块基于精确匹配结果生成关于运输车辆在预设地图中定位位置的第一定位结果;
6、所述服务器通过点云数据采集模块基于激光雷达实时采集表征运输车辆行驶过程中车前环境的点云数据,并利用稠密点云数据获取模块基于点云数据获取稠密点云数据,所述服务器通过静态点云数据获取模块从稠密点云数据中获取静态点云数据,并利用第二定位结果生成模块基于静态点云数据生成关于运输车辆在预设地图中定位位置的第二定位结果,所述服务器通过最终定位结果生成模块结合第一定位结果、第二定位结果生成关于运输车辆的最终定位结果,并利用车辆位置可视化模块基于最终定位结果对运输车辆在预设地图中进行位置可视化显示。
7、优选地,所述货物车辆信息绑定模块对运输车辆及其运输货物进行信息绑定,包括:
8、在将运输货物装载至运输车辆时,通过扫码系统对物码与车码进行扫描,实现对运输车辆及其运输货物的信息绑定。
9、优选地,所述运行数据采集模块实时采集表征运输车辆行驶过程中地理位置和周围环境的运行数据,包括:
10、利用第一预设传感系统采集表征运输车辆行驶过程中地理位置的位置参数,利用第二设传感系统采集表征运输车辆行驶过程中周围环境的环境参数。
11、优选地,所述目标区域匹配模块对运行数据与预设地图进行匹配,得到表征运输车辆在预设地图中目标区域的粗略匹配结果,包括:
12、采用隐马尔可夫算法对位置参数与预设地图进行匹配,得到表征运输车辆在预设地图中目标区域的粗略匹配结果;
13、其中,位置参数包括卫星定位参数和/或惯性定位参数。
14、优选地,所述关键数据提取模块从粗略匹配结果中提取具有指示性的关键数据,包括:
15、获取预设地图中目标区域对应的目标环境参数,并从目标环境参数中提取目标标的物及相应的目标标的物参数,得到具有指示性的关键数据;
16、其中,目标标的物包括道路车道线、道路边界线、道路标志牌和关键帧数据,关键帧数据为预设地图中目标区域在逐帧动态展示过程中,出现与前一帧的内容变化程度超过预设阈值的帧。
17、优选地,所述目标位置匹配模块对运行数据与关键数据进行匹配,得到表征运输车辆在目标区域中目标位置的精确匹配结果,包括:
18、采用图优化算法对环境参数与关键数据进行匹配,得到表征运输车辆在目标区域中目标位置的精确匹配结果;
19、其中,环境参数包括点云环境参数和/或图像环境参数。
20、优选地,所述第一定位结果生成模块基于精确匹配结果生成关于运输车辆在预设地图中定位位置的第一定位结果,包括:
21、将精确匹配结果输入至预设误差匹配模型中进行迭代计算,并将迭代计算结果作为表征运输车辆在预设地图中定位位置的第一定位结果;
22、其中,预设误差匹配模型为预先训练的用于对匹配结果误差进行收敛拟合的模型。
23、优选地,所述稠密点云数据获取模块基于点云数据获取稠密点云数据,包括:
24、对点云数据采集模块采集的连续帧点云数据进行叠加,得到稠密点云数据。
25、优选地,所述静态点云数据获取模块从稠密点云数据中获取静态点云数据,包括:
26、通过神经网络对稠密点云数据进行语义分割,以确定稠密点云数据中各点属于动态目标或静态目标;
27、在稠密点云数据中剔除所有动态目标点,得到静态点云数据;
28、其中,动态目标包括行人和其它车辆,静态目标包括道路车道线、道路边界线和道路栅栏。
29、优选地,所述第二定位结果生成模块基于静态点云数据生成关于运输车辆在预设地图中定位位置的第二定位结果,包括:
30、对静态点云数据与预设地图的道路高精点云数据进行匹配,并将匹配结果作为表征运输车辆在预设地图中定位位置的第二定位结果。
31、(三)有益效果
32、与现有技术相比,本发明所提供的一种精准可视化tms物流运输管理系统,具有以下有益效果:
33、1)运行数据采集模块实时采集表征运输车辆行驶过程中地理位置和周围环境的运行数据,目标区域匹配模块对运行数据与预设地图进行匹配,得到表征运输车辆在预设地图中目标区域的粗略匹配结果,关键数据提取模块从粗略匹配结果中提取具有指示性的关键数据,目标位置匹配模块对运行数据与关键数据进行匹配,得到表征运输车辆在目标区域中目标位置的精确匹配结果,第一定位结果生成模块基于精确匹配结果生成关于运输车辆在预设地图中定位位置的第一定位结果,通过采集表征运输车辆行驶过程中地理位置和周围环境的运行数据,并对运行数据与预设地图、关键数据进行匹配,能够实现对运输车辆在预设地图中的有效定位;
34、2)点云数据采集模块基于激光雷达实时采集表征运输车辆行驶过程中车前环境的点云数据,稠密点云数据获取模块基于点云数据获取稠密点云数据,静态点云数据获取模块从稠密点云数据中获取静态点云数据,第二定位结果生成模块基于静态点云数据生成关于运输车辆在预设地图中定位位置的第二定位结果,通过采集表征运输车辆行驶过程中车前环境的点云数据,从点云数据中获取静态点云数据,并对静态点云数据与预设地图的道路高精点云数据进行匹配,能够实现对运输车辆在预设地图中的有效定位;
35、3)最终定位结果生成模块结合第一定位结果、第二定位结果生成关于运输车辆的最终定位结果,车辆位置可视化模块基于最终定位结果对运输车辆在预设地图中进行位置可视化显示,通过结合第一定位结果、第二定位结果实现对运输车辆的精准定位监控,并对运输车辆在预设地图中进行位置可视化显示,便于调度员对运输路线进行灵活调整,有效避免出现送货延误的情况。
- 还没有人留言评论。精彩留言会获得点赞!