一种多目标跟踪方法、装置、可读存储介质及电子设备与流程
本公开涉及目标跟踪,尤其涉及一种多目标跟踪方法、装置、可读存储介质及电子设备。
背景技术:
1、多目标跟踪在自动驾驶领域中是一个重点、难点和热点问题,需要解决目标重叠、遮挡、外观变化、运动模式变化等复杂情况。因此,研究者和工程师们一直在努力改进算法和方法,包括结合深度学习、多传感器信息融合、目标关联优化等技术手段,以提高多目标跟踪的准确性和鲁棒性。
2、目前的目标关联优化相关的技术手段通过对权值计算进行优化提高关联匹配的准确性,但是很多技术只能在特定的传感器观测进行使用,通用性不高,而一些通用性高的权值计算方法,比如直接使用马氏距离,欧式距离等作为权值,在轨迹滤波未收敛的情况下,往往有较大误差。
技术实现思路
1、为了解决上述提出目前的目标关联优化算法中存在通用性低或误差较大的技术问题,本公开提出了一种多目标跟踪方法、装置、可读存储介质及电子设备,能够减少进行目标关联时误匹配的问题,提高匹配的精确性,并且本公开基于马氏距离,欧式距离等作为权值,通用性高。
2、本公开提供了一种多目标跟踪方法,包括:
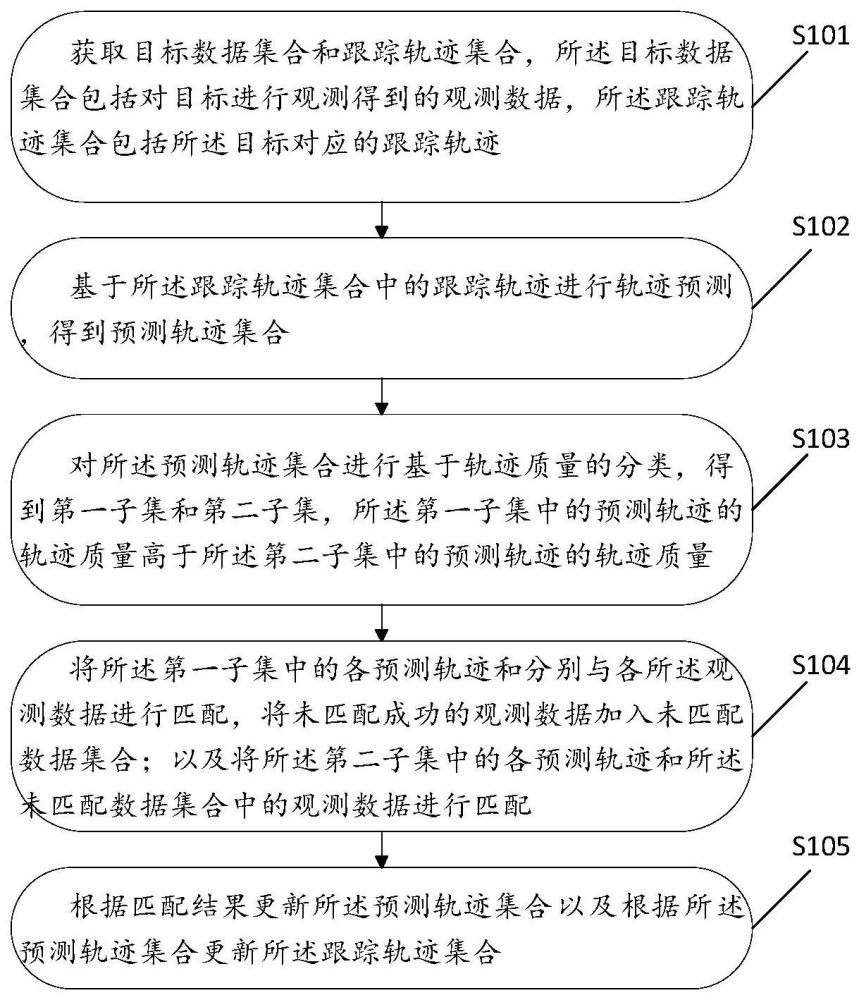
3、获取目标数据集合和跟踪轨迹集合,所述目标数据集合包括对目标进行观测得到的观测数据,所述跟踪轨迹集合包括所述目标对应的跟踪轨迹;
4、基于所述跟踪轨迹集合中的跟踪轨迹进行轨迹预测,得到预测轨迹集合;
5、对所述预测轨迹集合进行基于轨迹质量的分类,得到第一子集和第二子集,所述第一子集中的预测轨迹的轨迹质量高于所述第二子集中的预测轨迹的轨迹质量;
6、将所述第一子集中的各预测轨迹分别与各所述观测数据进行匹配,将未匹配成功的观测数据加入未匹配数据集合;以及将所述第二子集中的各预测轨迹分别与所述未匹配数据集合中的各观测数据进行匹配;
7、根据匹配结果更新所述预测轨迹集合;
8、根据所述预测轨迹集合更新所述跟踪轨迹集合。
9、在进一步的实施例中,所述对所述预测轨迹集合进行基于轨迹质量的分类,得到第一子集和第二子集,包括:
10、遍历所述预测轨迹集合,确定各所述预测轨迹的轨迹质量;
11、将各所述预测轨迹的轨迹质量分别与质量标准阈值进行比较,将轨迹质量高于或等于所述质量标准阈值的预测轨迹加入所述第一子集;将轨迹质量低于所述质量标准阈值的预测轨迹加入所述第二子集。
12、在进一步的实施例中,所述确定各所述预测轨迹的轨迹质量,包括:
13、针对所述预测轨迹集合中的每一预测轨迹,基于至少一个轨迹质量评估指标对所述预测轨迹进行评估,得到至少一个评估结果,根据所述至少一个评估结果得到所述预测轨迹的轨迹质量;
14、所述方法还包括:基于所述至少一个轨迹质量评估指标的标准参数确定所述质量标准阈值。
15、在进一步的实施例中,所述对所述预测轨迹集合进行基于轨迹质量的分类,得到第一子集和第二子集,包括:
16、针对所述预测轨迹集合中的任一预测轨迹,基于至少一个轨迹质量评估指标对所述预测轨迹进行评估,得到至少一个评估结果;
17、若各所述评估结果同时满足对应的标准参数,将所述预测轨迹加入所述第一子集。
18、在进一步的实施例中,所述将所述第一子集中的各预测轨迹和分别与各所述观测数据进行匹配之后,所述方法还包括:将匹配成功的观测数据加入已匹配数据集合;将匹配成功的预测轨迹加入已匹配轨迹集合;将匹配失败的预测轨迹加入未匹配轨迹集合;
19、所述将所述第二子集中的各预测轨迹和所述未匹配数据集合中的观测数据进行匹配之后,所述方法还包括:将匹配成功的观测数据加入已匹配数据集合;将匹配成功的预测轨迹加入已匹配轨迹集合;将匹配失败的预测轨迹加入未匹配轨迹集合。
20、在进一步的实施例中,所述根据匹配结果更新所述预测轨迹集合,包括:
21、针对所述已匹配轨迹集合中的每一预测轨迹,根据所述预测轨迹和所述已匹配数据集合中与所述预测轨迹对应的观测数据,对所述预测轨迹进行更新;
22、将所述未匹配轨迹集合中的预测轨迹判定为过期轨迹,并将所述过期轨迹从所述预测轨迹集合中删除;
23、根据所述未匹配数据集合中的观测数据新建轨迹,并将所述新建轨迹加入所述预测轨迹集合。
24、在进一步的实施例中,所述根据所述预测轨迹集合更新所述跟踪轨迹集合之后,所述方法还包括:
25、针对所述跟踪轨迹集合中的每一跟踪轨迹,确定所述跟踪轨迹的至少一个轨迹特征;
26、在所述至少一个轨迹特征符合预设的输出要求的情况下,输出所述跟踪轨迹。
27、本公开还提供一种多目标跟踪装置,所述装置用于实现上述的方法,所述装置包括:
28、获取模块,用于获取目标数据集合和跟踪轨迹集合;
29、预测模块,用于基于所述跟踪轨迹集合中的跟踪轨迹进行轨迹预测,得到预测轨迹集合;
30、分类处理模块,用于对所述预测轨迹集合进行基于轨迹质量的分类,得到第一子集和第二子集;
31、目标匹配模块,用于将所述第一子集中的各预测轨迹分别与各所述观测数据进行匹配,将未匹配成功的观测数据加入未匹配数据集合;以及用于将所述第二子集中的各预测轨迹分别与所述未匹配数据集合中的各观测数据进行匹配;
32、更新模块,用于根据匹配结果更新所述预测轨迹集合,以及用于根据所述预测轨迹集合更新所述跟踪轨迹集合。
33、本公开还提供一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有至少一条指令或至少一段程序,所述至少一条指令或至少一段程序由处理器加载并执行以实现如权利要求1-7中任意一项所述的多目标跟踪方法。
34、本公开还提供一种电子设备,所述电子设备包括:包括至少一个处理器,以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述至少一个处理器通过执行所述存储器存储的指令实现如权利要求1-7中任意一项所述的多目标跟踪方法。
35、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本公开。
36、实施本公开,具有以下有益效果:
37、本公开基于轨迹质量将预测轨迹进行分类后与观测数据进行匹配,高质量的预测轨迹优先与所有的观测数据进行匹配,低质量的预测轨迹再与剩余的观测数据进行匹配,可以减少因为匈牙利算法最大匹配原则造成的低质量预测轨迹挤占正确轨迹所对应的观测数据的现象,从而导致误匹配的问题,因此本公开可以减少预测轨迹与观测关联匹配的错误率,提高多目标追踪的准确度。并且本公开使用马氏距离,欧式距离等通用指标作为权值,采用匈牙利算法完成目标匹配,通用性高,适用于不同传感器的观测,使用成本低,兼容大部分关联匹配优化算法,可以结合其他关联优化算法与追踪优化算法来提高多目标追踪的准确率。
38、根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!