基于BIM技术的建筑施工数据处理方法与流程
本发明涉及数据处理,具体涉及基于bim技术的建筑施工数据处理方法。
背景技术:
1、在建筑施工的过程中图纸信息至关重要,工人需要根据图纸信息对建筑进行施工,二维图纸信息的空间信息携带比较少,不利于工人观察整个的建筑分布情况。bim作为成熟的三维模型,可以良好的展示建筑空间整体分布信息,而被广泛使用,但是三维的bim模型数据相对于二维数据来说,数据量比较大,需要对其进行压缩后存储提高其存储的效率。
2、现有的问题:三维建筑模型数据在压缩存储前,需要通过聚类算法来得到表征建筑结构特征的数据点,再对这些数据点进行存储。而现有的聚类分析时只考到数据点在空间的位置分布信息进行聚类,但是其bim三维模型会存在不同时间下的模型分布,其没有考虑到时间因素,会降低聚类结果准确性,使得获取的表征建筑结构特征的数据点可能无法较好的表征建筑结构特征,从而减小了建筑施工数据进行压缩存储时的数据可信度。
技术实现思路
1、本发明提供基于bim技术的建筑施工数据处理方法,以解决现有的问题。
2、本发明的基于bim技术的建筑施工数据处理方法采用如下技术方案:
3、本发明一个实施例提供了基于bim技术的建筑施工数据处理方法,该方法包括以下步骤:
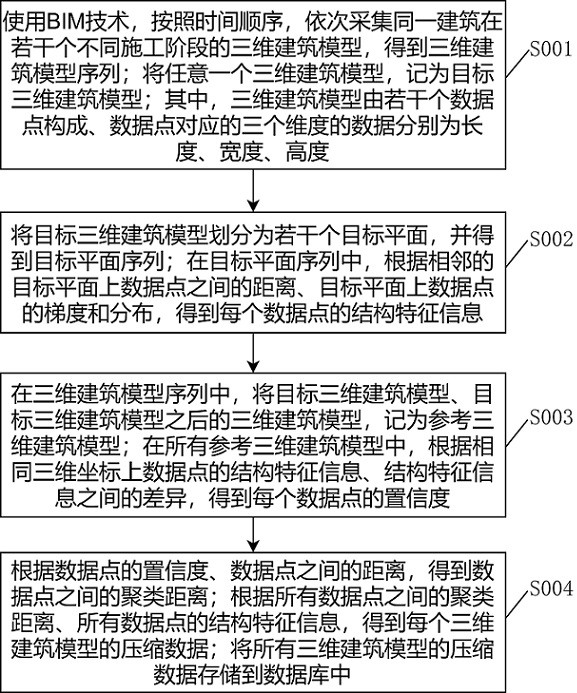
4、使用bim技术,按照时间顺序,依次采集同一建筑在若干个不同施工阶段的三维建筑模型,得到三维建筑模型序列;将任意一个三维建筑模型,记为目标三维建筑模型;其中,三维建筑模型由若干个数据点构成、数据点对应的三个维度的数据分别为长度、宽度、高度;
5、将目标三维建筑模型划分为若干个目标平面,并得到目标平面序列;在目标平面序列中,根据相邻的目标平面上数据点之间的距离、目标平面上数据点的梯度和分布,得到每个数据点的结构特征信息;
6、在三维建筑模型序列中,将目标三维建筑模型、目标三维建筑模型之后的三维建筑模型,记为参考三维建筑模型;在所有参考三维建筑模型中,根据相同三维坐标上数据点的结构特征信息、结构特征信息之间的差异,得到每个数据点的置信度;
7、根据数据点的置信度、数据点之间的距离,得到数据点之间的聚类距离;根据所有数据点之间的聚类距离、所有数据点的结构特征信息,得到每个三维建筑模型的压缩数据;将所有三维建筑模型的压缩数据存储到数据库中。
8、进一步地,所述将目标三维建筑模型划分为若干个目标平面,并得到目标平面序列,包括的具体步骤如下:
9、将目标三维建筑模型中的数据点对应的任意一个维度的数据,记为目标数据;
10、在目标三维建筑模型中,将相同的目标数据对应的所有数据点构成的二维平面,记为目标平面;
11、根据目标数据的大小,由小到大对所有目标平面进行排序,得到目标平面序列。
12、进一步地,所述在目标平面序列中,根据相邻的目标平面上数据点之间的距离、目标平面上数据点的梯度和分布,得到每个数据点的结构特征信息,包括的具体步骤如下:
13、将任意一个目标平面,记为主目标平面;
14、将主目标平面上任意一个数据点,记为目标点;
15、计算主目标平面上目标点的偏导数,得到目标点的梯度;
16、在主目标平面上,作从目标点开始、沿着目标点的梯度方向的射线,将所述射线上的数据点数量,记为目标点的携带信息量;
17、将主目标平面上与目标点相邻的所有数据点和目标点的数量,记为目标点的邻域信息量;
18、在目标平面序列中,将与主目标平面相邻的两个目标平面,记为分目标平面;
19、根据两个分目标平面上所有数据点与目标点的距离,得到目标点的直线程度;
20、根据目标点的携带信息量、邻域信息量、直线程度,得到目标点的结构特征信息。
21、进一步地,所述根据两个分目标平面上所有数据点与目标点的距离,得到目标点的直线程度,包括的具体步骤如下:
22、分别将两个分目标平面上距离目标点最近的一个数据点,记为参考点;
23、将目标点分别与两个参考点构成的直线,记为目标直线;
24、将两个目标直线的夹角值中的最小值,记为目标点的直线程度。
25、进一步地,所述根据目标点的携带信息量、邻域信息量、直线程度,得到目标点的结构特征信息对应的具体计算公式为:
26、
27、其中d为目标点的结构特征信息,n为目标点的携带信息量,b为目标点的邻域信息量,为目标点的直线程度,为线性归一化函数。
28、进一步地,所述在所有参考三维建筑模型中,根据相同三维坐标上数据点的结构特征信息、结构特征信息之间的差异,得到每个数据点的置信度,包括的具体步骤如下:
29、将目标点的三维坐标,记为目标三维坐标;
30、在所有参考三维建筑模型中,依次统计目标三维坐标对应的数据点的结构特征信息,得到目标点的结构特征信息序列;
31、根据目标点的结构特征信息序列中相邻数据的差异,得到目标点的信息携带稳定性;
32、在目标三维建筑模型中,以目标点为中心点,构建一个大小为的正方体;所述q为预设的边长;
33、在正方体中,将不是目标点的数据点,记为映照点;
34、根据目标点的结构特征信息序列中的最大值、目标点和所有映照点的信息携带稳定性,得到目标点的置信度。
35、进一步地,所述根据目标点的结构特征信息序列中相邻数据的差异,得到目标点的信息携带稳定性,包括的具体步骤如下:
36、在目标点的结构特征信息序列中,依次计算前一个数据减去后一个数据的差值,得到差值序列;
37、将差值序列中所有数据的方差,记为目标点的信息携带稳定性。
38、进一步地,所述根据目标点的结构特征信息序列中的最大值、目标点和所有映照点的信息携带稳定性,得到目标点的置信度对应的具体计算公式为:
39、
40、其中a为目标点的置信度,为目标点的信息携带稳定性,为目标点的结构特征信息序列中的最大值,为第j个映照点的信息携带稳定性,n为映照点的数量,为以自然常数为底的指数函数,k为预设的指数函数调整值,为线性归一化函数。
41、进一步地,所述根据数据点的置信度、数据点之间的距离,得到数据点之间的聚类距离,包括的具体步骤如下:
42、在目标三维建筑模型中,将任意两个数据点,分别记为第一数据点和第二数据点;
43、根据第一数据点和第二数据点之间的距离、第一数据点和第二数据点的置信度,得到第一数据点和第二数据点之间的聚类距离对应的具体计算公式为:
44、
45、其中l为第一数据点和第二数据点之间的聚类距离,为第一数据点的置信度,为第二数据点的置信度,s为第一数据点和第二数据点之间的距离。
46、进一步地,所述根据所有数据点之间的聚类距离、所有数据点的结构特征信息,得到每个三维建筑模型的压缩数据,包括的具体步骤如下:
47、根据目标三维建筑模型中所有数据点之间的聚类距离,使用迭代自组织聚类算法,将目标三维建筑模型中所有数据点划分为若干个聚类簇;
48、将每个聚类簇中所有数据点的结构特征信息的均值,记为每个聚类簇的特征值;
49、统计所有聚类簇的特征值中的最大值,将所述最大值对应的聚类簇,记为目标簇;
50、对目标簇中所有数据点,使用lz77压缩算法进行压缩处理,得到目标三维建筑模型的压缩数据。
51、本发明的技术方案的有益效果是:
52、本发明实施例中,依次采集同一建筑在若干个不同施工阶段的三维建筑模型,得到三维建筑模型序列,将任意一个三维建筑模型,记为目标三维建筑模型。获取每个数据点的结构特征信息。其通过分析数据点所在的平面中的梯度信息的变化情况和其相邻平面之间的一致性获得到每个数据点的结构特征信息情况,提高了后续数据聚类的准确性。将目标三维建筑模型、目标三维建筑模型之后的三维建筑模型,记为参考三维建筑模型,在所有参考三维建筑模型中,根据相同三维坐标上数据点的结构特征信息,得到每个数据点的置信度。其结合了不同施工阶段中的数据点获得结构特征的变化信息,进一步提高了后续数据聚类的准确性。由此获取数据点之间的聚类距离,从而得到每个三维建筑模型的压缩数据,将所有三维建筑模型的压缩数据存储到数据库中。至此本发明通过自适应数据点之间的距离,提高了表征建筑结构特征的数据点检测的准确性,从而提高了建筑施工数据进行压缩存储时的数据可信度。
- 还没有人留言评论。精彩留言会获得点赞!