图像最小外接多边形的获取方法、装置、终端及存储介质与流程
本申请属于图像处理,尤其涉及一种图像最小外接多边形的获取方法、装置、终端及存储介质。
背景技术:
1、随着深度学习技术的发展,对拥有几何形状的物体的外形轮廓的检测技术在图像分割、物体定位等领域中也得到了广泛的应用,现有的获取目标检测物体的外形轮廓主要通过对目标检测物体的图像进行手工标注识别获得,不仅成本高,而且耗时长,效率较低,对于一些颜色单一、形状特殊的目标检测物体的图像虽可以使用颜色识别或者形状识别获得目标检测物体的外形轮廓,但该类识别方法具有局限性,并不是对所有的目标检测物体都适用,尤其是对一些形状不规则或颜色复杂的目标检测物体可能无法识别,或者识别效果不佳,识别效率较低。
技术实现思路
1、有鉴于此,本申请实施例提供一种图像最小外接多边形的获取方法、装置、终端及存储介质,以解决现有技术中对形状不规则或颜色复杂的目标检测物体的外形轮廓识别效果不佳、识别效率低的问题。
2、本申请实施例的第一方面提供了一种图像最小外接多边形的获取方法,所述图像最小外接多边形的获取方法包括:
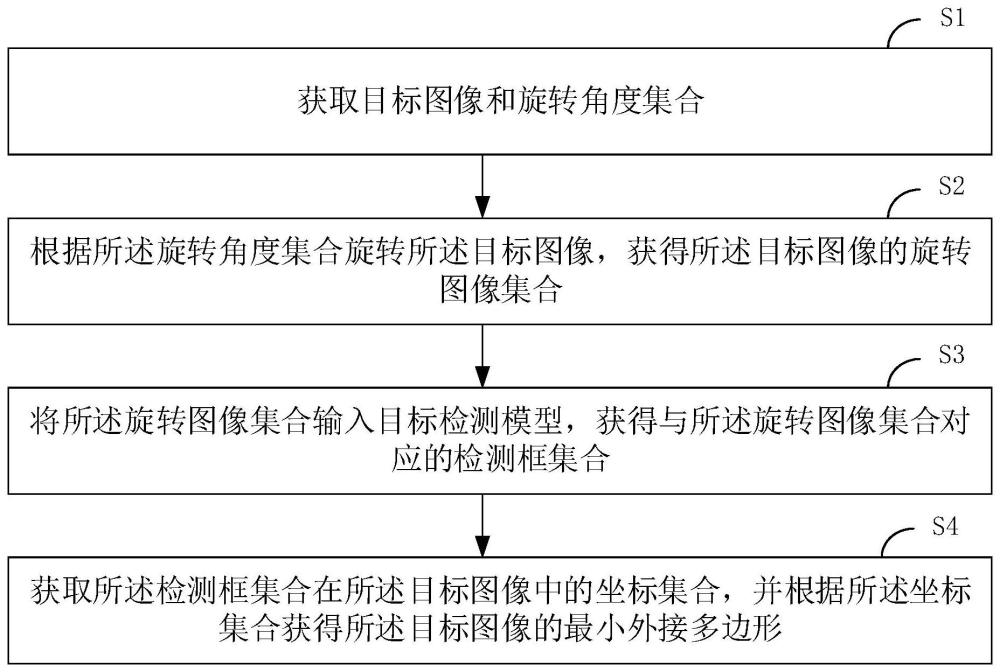
3、获取目标图像和旋转角度集合,所述旋转角度集合包括介于0度至90度之间的多个角度数据;
4、根据所述旋转角度集合旋转所述目标图像,获得所述目标图像的旋转图像集合;
5、将所述旋转图像集合输入目标检测模型,获得与所述旋转图像集合对应的检测框集合;
6、获取所述检测框集合在所述目标图像中的坐标集合,并根据所述坐标集合获得所述目标图像的最小外接多边形。
7、本申请实施例的第二方面提供一种图像最小外接多边形的获取装置,所述图像最小外接多边形的获取装置包括:
8、第一获取模块,用于获取目标图像和旋转角度集合,所述旋转角度集合包括介于0度至90度之间的多个角度数据;
9、旋转模块,用于根据所述旋转角度集合旋转所述目标图像,获得所述目标图像的旋转图像集合;
10、检测模块,用于将所述旋转图像集合输入目标检测模型,获得与所述旋转图像集合对应的检测框集合;
11、第二获取模块,用于获取所述检测框集合在所述目标图像中的坐标集合,并根据所述坐标集合获得所述目标图像的最小外接多边形。
12、本申请实施例的第三方面提供一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如本申请实施例的第一方面所述的图像最小外接多边形的获取方法的步骤。
13、本申请实施例的第四方面提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如本申请实施例的第一方面所述的图像最小外接多边形的获取方法的步骤。
14、本申请实施例的第一方面提供的图像最小外接多边形的获取方法,通过先获取目标图像和旋转角度集合,旋转角度集合包括介于0度至90度之间的多个角度数据;然后根据旋转角度集合旋转目标图像,获得目标图像的旋转图像集合;再将旋转图像集合输入目标检测模型,获得与旋转图像集合对应的检测框集合;最后获取检测框集合在目标图像中的坐标集合,并根据坐标集合获得目标图像的最小外接多边形,如此,可以有效解决现有技术中对形状不规则或颜色复杂的目标检测物体的外形轮廓识别效果不佳、识别效率低的问题,获得更贴合目标检测物体的外形轮廓,从而在对目标检测物体的尺寸进行计算时可以获得更为准确的计算结果。
15、可以理解的是,上述第二方面至第四方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
技术特征:
1.一种图像最小外接多边形的获取方法,其特征在于,包括:
2.如权利要求1所述的图像最小外接多边形的获取方法,其特征在于,所述根据所述旋转角度集合旋转所述目标图像,获得所述目标图像的旋转图像集合,包括:
3.如权利要求2所述的图像最小外接多边形的获取方法,其特征在于,所述根据所述旋转角度集合顺时针旋转所述目标图像,获得所述目标图像的顺时针旋转图像集合,包括:
4.如权利要求2所述的图像最小外接多边形的获取方法,其特征在于,所述根据所述旋转角度集合逆时针旋转所述目标图像,获得所述目标图像的逆时针旋转图像集合,包括:
5.如权利要求3所述的图像最小外接多边形的获取方法,其特征在于,所述将所述旋转图像集合输入目标检测模型,获得与所述旋转图像集合对应的检测框集合,包括:
6.如权利要求4所述的图像最小外接多边形的获取方法,其特征在于,所述将所述旋转图像集合输入目标检测模型,获得与所述旋转图像集合对应的检测框集合,包括:
7.如权利要求5所述的图像最小外接多边形的获取方法,其特征在于,所述获取所述检测框集合在所述目标图像中的坐标集合,并根据所述坐标集合获得所述目标图像的最小外接多边形,包括:
8.如权利要求6所述的图像最小外接多边形的获取方法,其特征在于,所述获取所述检测框集合在所述目标图像中的坐标集合,并根据所述坐标集合获得所述目标图像的最小外接多边形,包括:
9.一种图像最小外接多边形的获取装置,其特征在于,所述图像最小外接多边形的获取装置包括:
10.一种终端,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至8任一项所述的图像最小外接多边形的获取方法的步骤。
11.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的图像最小外接多边形的获取方法的步骤。
技术总结
本申请适用于图像处理技术领域,提供了一种图像最小外接多边形的获取方法、装置、终端及存储介质,方法包括:通过先获取目标图像和旋转角度集合,旋转角度集合包括介于0度至90度之间的多个角度数据;然后根据旋转角度集合旋转目标图像,获得目标图像的旋转图像集合;再将旋转图像集合输入目标检测模型,获得与旋转图像集合对应的检测框集合;最后获取检测框集合在目标图像中的坐标集合,并根据坐标集合获得目标图像的最小外接多边形。本申请实施例可以有效获得更贴合目标检测物体的外形轮廓,解决现有技术中对形状不规则或颜色复杂的目标检测物体的外形轮廓识别效果不佳、识别效率低的问题。
技术研发人员:张浩
受保护的技术使用者:大连熵基科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!