锚泊辅助动力定位作业时的能力评估方法与流程
本发明涉及船舶动力定位控制,尤其涉及一种锚泊辅助动力定位作业时的能力评估方法。
背景技术:
1、动力定位系统能够依靠船舶自身的推进器,抵御外部海洋环境的干扰,实现船舶的位置、艏向的保持,其机动性强,不受水深限制的特点,逐渐成为海工作业配套设备的发展趋势。动力定位系统主要由控制系统、测量系统、推进系统与动力系统。控制系统是动力定位系统的核心,结合船舶运动状态信息,计算保持船舶预定位置或艏向所需的控制力和力矩;测量系统用于提供实时、精确的船舶位置、姿态信息;推进系统主要包括各类执行机构,响应控制指令产生推力,以抵御外界环境;动力系统负责提供电力分配与管理,满足各类作业工况的需求。
2、锚泊定位是一种被动式的定位结构,其原理是利用锚缆的反向张力来平衡环境力,达到限制船舶漂移的目的,从而使它保持在一定范围内。锚泊辅助动力定位是动力定位应用的一种方式,它将被动式的锚泊系统和主动式的动力定位系统两者有效地结合在一起,兼顾了两者优点。在相对恶劣的海况下,锚泊辅助动力定位系统可以更好地实现定位要求。
3、动力定位能力分析是通过计算动力定位系统所产生的推力所能抵抗不同角度的最大环境载荷进而分析船舶是否具备在当前环境条件下定位的能力。在动力定位作业过程中,结合当前船舶推进系统、电力系统的工作状态来开展动力定位能力分析,能够为操作人员在当前环境下是否继续开展作业提供决策依据。
4、现有的技术方案均为单一动力定位系统的能力计算方法,并无锚泊辅助动力定位作业时的能力计算方法。
技术实现思路
1、本发明旨在至少解决相关技术中存在的技术问题之一。为此,本发明提供一种锚泊辅助动力定位作业时的能力评估方法,实现提高对锚泊辅助动力定位作业时的能力评估的准确性和可靠性,提高作业的安全性。
2、本发明提供一种锚泊辅助动力定位作业时的能力评估方法,包括如下步骤:
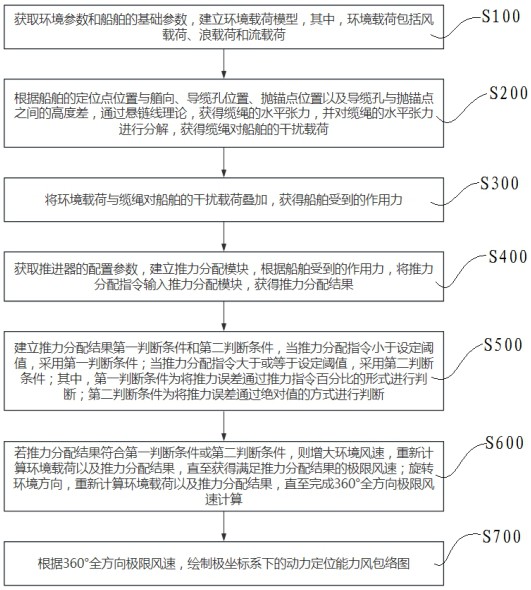
3、s100、获取环境参数和船舶的基础参数,建立环境载荷模型,其中,环境载荷包括风载荷、浪载荷和流载荷;
4、s200、根据船舶的定位点位置与艏向、导缆孔位置、抛锚点位置以及导缆孔与抛锚点之间的高度差,通过悬链线理论,获得缆绳的水平张力,并对缆绳的水平张力进行分解,获得缆绳对船舶的干扰载荷;
5、s300、将环境载荷与缆绳对船舶的干扰载荷叠加,获得船舶受到的作用力;
6、s400、获取推进器的配置参数,建立推力分配模块,根据船舶受到的作用力,将推力分配指令输入推力分配模块,获得推力分配结果;
7、s500、建立推力分配结果第一判断条件和第二判断条件,当推力分配指令大于或等于设定阈值,采用第一判断条件;当推力分配指令小于设定阈值,采用第二判断条件;
8、其中,第一判断条件为将推力误差通过推力指令百分比的形式进行判断;第二判断条件为将推力误差通过绝对值的方式进行判断;
9、s600、若推力分配结果符合第一判断条件或第二判断条件,则增大环境风速,重新计算环境载荷以及推力分配结果,直至获得满足推力分配结果的极限风速;
10、旋转环境方向,重新计算环境载荷以及推力分配结果,直至完成360°全方向极限风速计算;
11、s700、根据360°全方向极限风速,绘制极坐标系下的动力定位能力风包络图。
12、根据本发明提供的一种锚泊辅助动力定位作业时的能力评估方法,所述s100步骤中,风载荷的计算式为:
13、
14、
15、
16、其中,为纵向风载荷力;为横向风载荷力;为艏向风载荷力矩;为纵向风载荷系数;为横向风载荷系数;为艏向风载荷系数;为空气密度;为风速;为正向风投影面积;为侧向风投影面积;为船舶长度。
17、根据本发明提供的一种锚泊辅助动力定位作业时的能力评估方法,所述s100步骤中,浪载荷的计算式为:
18、
19、
20、
21、其中,为纵向浪载荷力;为横向浪载荷力;为艏向浪载荷力矩;为纵向浪载荷系数;为横向浪载荷系数;为艏向浪载荷系数;为海水密度;为波幅;为船舶垂线间长。
22、根据本发明提供的一种锚泊辅助动力定位作业时的能力评估方法,所述s100步骤中,流载荷的计算式为:
23、
24、
25、
26、其中,为纵向流载荷力;为横向流载荷力;为艏向流载荷力矩;为纵向流载荷系数;为横向流载荷系数;为艏向流载荷系数;为流速;为船舶宽度;为船舶吃水。
27、根据本发明提供的一种锚泊辅助动力定位作业时的能力评估方法,所述s200步骤包括:
28、s210、获取导缆孔在大地坐标系下的位置;
29、
30、其中,为导缆孔在大地坐标系下的北向位置;为导缆孔在大地坐标系下的东向位置;、、分别依次表示船舶当前定位作业点的北向位置、东向位置以及作业艏向;为导缆孔相对于船舶中心的纵向位置;为导缆孔相对于船舶中心的横向位置;
31、s220、获取导缆孔与抛锚点之间的水平距离和垂直距离;
32、
33、
34、其中,为导缆孔位置与抛锚点的水平距离;为导缆孔位置与抛锚点的垂直距离;为抛锚点在大地坐标系下的北向位置;为抛锚点在大地坐标系下的东向位置;为导缆孔至船底的垂向距离;为水深;
35、s230、设定水平张力、缆绳顶端倾角以及缆绳底部倾角初始值,计算缆绳的水平张力与垂直张力;
36、
37、其中,为触地点处缆绳张力的垂直分量;为缆绳垂直方向的投影距离;为缆绳水平方向的投影距离;为系泊缆绳的单位重量,为缆绳弹性模量,为横截面积;
38、s240、设定收敛条件;
39、
40、若满足,则停止迭代计算;若不满足,则执行s350步骤,更新缆绳的水平张力、垂直张力并返回s330步骤开展迭代计算;
41、其中,、为水平方向的距离收敛阈值;为垂直方向的距离收敛阈值;
42、s250、若,则判断缆绳无触地部分,,,更新公式为:
43、
44、若,更新公式为:
45、
46、其中,为水平方向的距离收敛系数;为垂直方向的距离收敛系数;与分别依次代表横向分力与垂向分力迭代步长系数;为缆绳长度;
47、s260、分解缆绳的水平张力,获得船舶坐标系下,缆绳对船舶的干扰载荷;干扰载荷的计算式为:
48、
49、其中,为纵向干扰载荷力;为横向干扰载荷力;为艏向干扰载荷力矩;为缆绳的水平张力方向与艏向的夹角。
50、根据本发明提供的一种锚泊辅助动力定位作业时的能力评估方法,所述s300步骤中,船舶受到的作用力的计算式为:
51、
52、其中,为船舶受到的纵向作用力;为船舶受到的横向作用力;为船舶受到的艏向作用力;为锚缆数量;为第根锚缆。
53、根据本发明提供的一种锚泊辅助动力定位作业时的能力评估方法,所述s400步骤中,推力分配指令为:
54、。
55、根据本发明提供的一种锚泊辅助动力定位作业时的能力评估方法,所述s500中,第一判断条件为:
56、
57、第二判断条件为:
58、
59、其中,为推力分配模块的反馈值;为对应第一判断条件的对应判断条件的阈值参数;为对应第二判断条件的阈值参数。
60、本发明实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
61、本发明提供的锚泊辅助动力定位作业时的能力评估方法,包括如下步骤:
62、s100、获取环境参数和船舶的基础参数,建立环境载荷模型,其中,环境载荷包括风载荷、浪载荷和流载荷;
63、s200、根据船舶的定位点位置与艏向、导缆孔位置、抛锚点位置以及导缆孔与抛锚点之间的高度差,通过悬链线理论,获得缆绳的水平张力,并对缆绳的水平张力进行分解,获得缆绳对船舶的干扰载荷;
64、s300、将环境载荷与缆绳对船舶的干扰载荷叠加,获得船舶受到的作用力;
65、s400、获取推进器的配置参数,建立推力分配模块,根据船舶受到的作用力,将推力分配指令输入推力分配模块,获得推力分配结果;
66、s500、建立推力分配结果第一判断条件和第二判断条件,当推力分配指令大于或等于设定阈值,采用第一判断条件;当推力分配指令小于设定阈值,采用第二判断条件;
67、其中,第一判断条件为将推力误差通过推力指令百分比的形式进行判断;第二判断条件为将推力误差通过绝对值的方式进行判断;
68、s600、若推力分配结果符合第一判断条件或第二判断条件,则增大环境风速,重新计算环境载荷以及推力分配结果,直至获得满足推力分配结果的极限风速;
69、旋转环境方向,重新计算环境载荷以及推力分配结果,直至完成360°全方向极限风速计算;
70、s700、根据360°全方向极限风速,绘制极坐标系下的动力定位能力风包络图;通过对船舶在当前位置抛锚开展定位作业时的能力分析计算,即作业位置与抛锚点位置均已确定情况下的动力定位能力计算方法,可以为操作人员在当前环境下是否能开展作业提供辅助决策,提高了对锚泊辅助动力定位作业时的能力评估的准确性和可靠性,提高作业的安全性。
71、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!