一种基于卷积神经网络多鲁棒核容积卡尔曼滤波的焊接速度解算方法
本发明涉及卡尔曼滤波算法的,特别设计一种基于卷积神经网络多鲁棒核容积卡尔曼滤波的焊接速度解算方法。
背景技术:
1、在焊接的生产过程中,焊接速度是焊缝质量的重要保证。为提高焊接的准确性和可靠性,需要通过传感器把控焊接过程的焊接速度,而焊接速度无法通过传感器直接获取,需要进行多传感器数据融合解算焊接速度,但在许多实际问题中的运动状态空间方程为非线性方程,尤其是在环境复杂的情况下,大部分情况具有较高的非线性,而且参数较多维度较高,常用的卡尔曼滤波、扩展卡尔曼滤波和无迹卡尔曼滤波无法满足该种情形,而容积卡尔曼滤波不仅可以起到很好的滤波效果而且效率高,许多生产监测领域已经使用了容积卡尔曼滤波进行监测,如对水下潜艇的姿态监测、对卫星位姿的监测、对于发射导弹速度姿态的监测等。但是该算法仍然具有不足之处,一方面是针对于非高斯噪声,存在波动性较大的离群点时无法起到较好的作用,另一方面在时间上,下一时刻更新状态时,仅针对于上一时刻状态去更新下一状态,而对于之前的状态变化没有考虑,如果某一段时间内运动状态变化较大对后续本应产生较大影响,而在滤波过程中可能会忽略该影响。而且日常工业场景的焊接速度为几百毫米每分钟,位置监测误差需要保证在毫米级,测速精度要求较高,需要选择合适的传感器才能保证速度解算满足焊接工况需求。
2、申请号202111043585.1名称为一种提高弹载接收机定位、测速精度的方法、装置及设备,该专利由于最小二乘法提供初始值给卡尔曼滤波模型,加快卡尔曼滤波迭代运算快速收敛,并每轮计算都会进行卫星伪距的误差修正,从而使得定位、定速精度提高。但该定位、测速方法采用的卫星,而卫星定位精度都是米级精度,在硬件设备上限制了定位精度,因此测速精度不会太高,适用于航空航天、导弹等领域,但不适用于焊接测速领域。申请号202011642788.8,名称为基于单目视觉的目标测速方法,公布了一种基于单目视觉的目标测速方法,该方法解决外参数误差引起的测速精度损失和测距误差引起的测速精度损失,实现了较高精度的测速。但是焊接过程中,存在强光、烟雾等问题,无法拍摄清晰的图像,而且相机可能存在丢帧的情况,采用单一相机进行测速难以保证可以获取整个焊接过程的速度,无法保证速度解算的鲁棒性。
3、申请号202010483616.4名称为一种基于最大相关熵扩展卡尔曼滤波的雷达目标跟踪方法,对于非线性、非高斯滤波问题,可以获得误差二阶项信息,还可以捕捉滤波误差的高阶统计量,实现了对雷达的跟踪,但是仅采用了单一核函数和非自适应核带宽;申请号202110929287.6名称为一种基于中心误差熵准则容积卡尔曼滤波的航天器姿态确定方法,由线性回归方程确立由高斯核函数构成的代价函数,得到当前时刻航天器状态和状态协方差,但也为单一核函数和非自适应核带宽;申请号202110253991.4名称为基于卷积神经网络融合ekf的拖缆姿态解算方法及系统,该方法与系统能够实时监测拖缆的姿态数据,较精准地解算拖缆的姿态。但是,上述公开的技术方案仍然存在如下技术问题:(1)扩展卡尔曼滤波仅适用于高斯噪声的监测对象,针对非高斯噪声的外界干扰,难以进行识别,从而难以进行处理,不具有处理具有非高斯噪声的能力。(2)直接针对监测值与真实值的误差作为神经网络的输出值,会使得该网络仅适用于特定工况下的误差值预测,泛化性较差。(3)该技术方案主要针对拖缆姿态解算,在焊接速度解算领域还需要根据焊接的特性布置相应的传感器才可实现。
4、本发明采用焊接强光相机获取焊点的位置避免了焊接强光的干扰,惯性传感器和焊接强光相机的数据进行融合可以保证速度解算的鲁棒性,基于卷积神经网络多鲁棒核容积卡尔曼滤波的方法的神经网络针对外界输入自适应使用不同核函数、核带宽及调节参数进行位置、速度等信息的监测,克服了焊接过程的非线性和噪声的非高斯性,因此采用基于卷积神经网络多鲁棒核容积卡尔曼滤波的方法对焊接强光相机和惯性传感器的数据解算速度,保证了焊接速度解算的鲁棒性和精确性,满足焊接工况的监测需求。
5、因此,由于工业环境的复杂性、噪声的多样性,监测过程焊接测速精度要求高,受到强光、烟雾等因素的干扰,需要将非线性运动过程的非高斯噪声的滤除,为了解决以上问题解算出高精度的焊接速度急需开发一种有效的焊接速度解算方法。
技术实现思路
1、本发明提供了一种基于卷积神经网络多鲁棒核容积卡尔曼滤波的焊接速度解算方法。在目标监测中,受到监测目标的非线性运动的影响、来自各传感器的非高斯噪声带来的累计误差的影响;监测过程焊接测速精度要求高;受到强光、烟雾等因素的干扰。因此提升测速精度,避免强光、烟雾干扰,并将非线性过程的非高斯噪声滤除是十分重要的。本发明提出的算法以在一定的工业环境下,采用惯性传感器和焊接强光专用相机采集数据进行解算,保证定位初始精度和鲁棒性,用训练好的神经网络,针对不同的输入自适应调节核函数、核带宽及相关调节参数以实现对非线性运动过程的非高斯噪声有效滤除,从而能够更为精确地监测目标的速度。利用多传感器数据融合、深度学习和卡尔曼滤波技术实现对目标的高精度监测,有效地解决了当下焊接测速精度要求高、受强光烟雾干扰、难以滤除非线性运动过程的非高斯噪声的问题,能够精确地监测焊接的速度。
2、本发明采用的技术方案如下:
3、一种基于卷积神经网络多鲁棒核容积卡尔曼滤波的焊接速度解算方法,其特征在于,包括以下步骤:
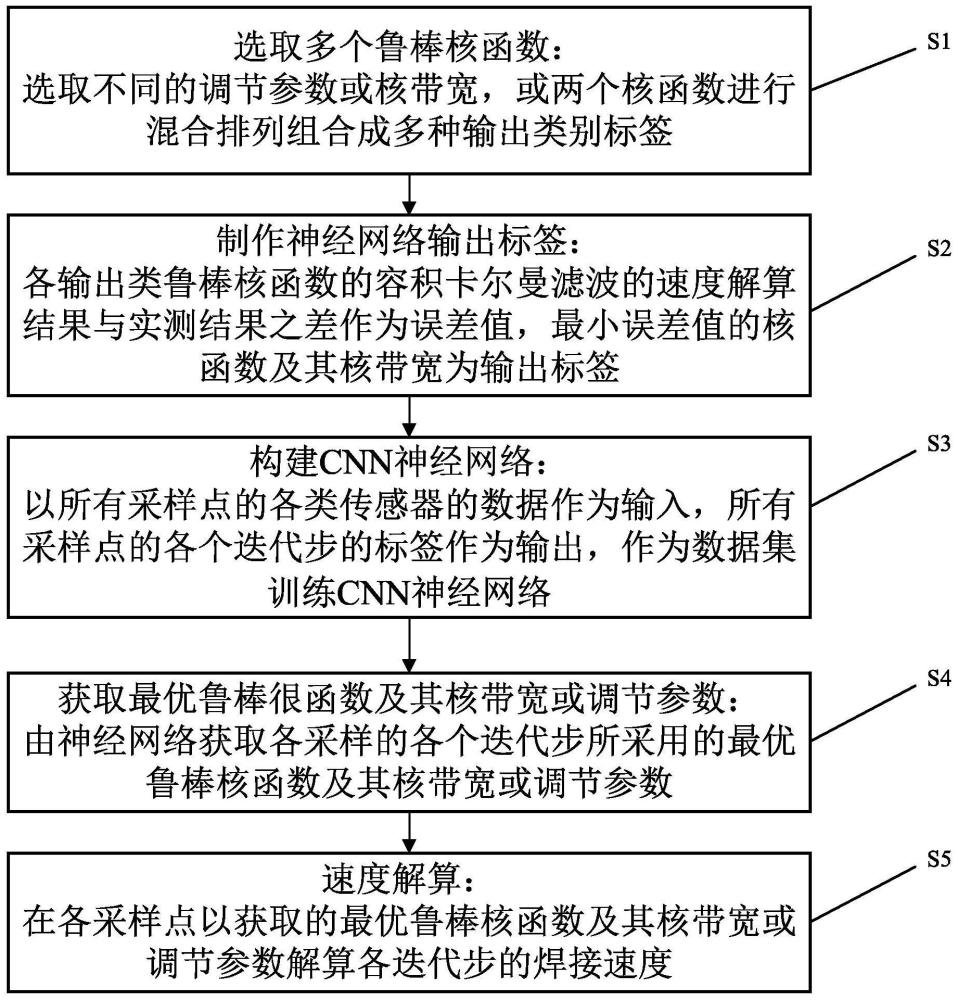
4、s1:选取多个鲁棒核函数:选取不同的调节参数或核带宽的核函数,或两个核函数进行混合排列组合成不同的鲁棒核函数;所述鲁棒核函数包括huber核函数、拉普拉斯核函数、高斯核函数、以及拉普拉斯核函数和高斯核函数的混合核函数;
5、s2:制作神经网络输出标签:各输出类鲁棒核函数的容积卡尔曼滤波的速度解算结果与实测结果之差作为误差值,最小误差值的核函数及其核带宽为输出标签;所述鲁棒核函数的容积卡尔曼滤波为基于最大相关熵准则、容积规则、所选核函数利用非线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计;所述速度实测结果xk由焊接机器人获取,速度解算结果x1kf、x2kf...xnkf(n为核函数的种类个数)通过传感器获得姿态、加速度、磁场、角速度和亮度最高点的坐标由基于最大相关熵准则的各类鲁棒核函数和不同核带宽的容积卡尔曼滤波求解;所述误差值为各个采样点其滤波估计值与实测值之差的二范数,n为迭代步数:
6、
7、比对各迭代步各核函数的解算估计值与实测值的误差值选出误差最小的核函数,并将其作为该迭代的标签;若出现多个核函数最优则优选huber核函数的标签;所述获取姿态、加速度、磁场、角速度的传感器为关系传感器;所述获取亮度最高点的坐标的传感器为焊接强光专用相机。
8、s3:构建cnn神经网络:以所有采样点的各类传感器的数据作为输入,所有采样点的各个迭代步的标签作为输出,作为数据集训练cnn神经网络。
9、s4:获取最优鲁棒核函数及其核带宽或调节参数:由神经网络获取各采样的各个迭代步所采用的最优鲁棒核函数及其核带宽或调节参数;
10、s5:速度解算:在各采样点以获取的最优鲁棒核函数及其核带宽或调节参数解算各迭代步的焊接速度;所述解算过程中上一迭代步的输出为下一迭代步的输入,所述解算过程为s2解算过程中替换相应的核函数为所获取最优鲁棒核函数及其核带宽或调节参数。
11、进一步地,步骤s1中所述鲁棒核函数公式如下,所述huber核函数的计算公式为:
12、
13、所述拉普拉斯核函数的计算公式为:
14、
15、所述高斯核函数的计算公式为:
16、
17、所述拉普卡斯核函数和高斯核函数的混合核函数为:
18、
19、ζ为观测值与估计值的误差,ζi为ζ矩阵上的各个元素,γ为调节参数,σ为核带宽,α为比例调节参数,0<α<1;
20、进一步地,步骤s2中所述鲁棒核函数公式如下,所述解算各输出类鲁棒核函数的容积卡尔曼滤波的速度解算过程如下:
21、初始化初始状态噪声矩阵qk-1、初始观测噪声矩阵rk-1、初始误差协方差矩阵pk-1|k-1、容积点ξi、初始状态容积权重ωi。容积点ξi计算公式如下:
22、
23、容积权重ωi计算公式如下:
24、
25、ei为其中n×n单位矩阵的第i列,并且n=2n为采样频率,利用容积卡尔曼滤波状态预测得到状态一步预测和预测方差pk|k-1,进行状态更新获得量测预测针对不同的核函数进计算,误差值ζ的计算公式为:
26、
27、huber核函数的容积卡尔曼滤波的观测噪声矩阵rk的状态更新计算公式为:
28、rk=chol(rk-1)'*inv(ρ(ζ))*chol(rk-1)
29、ρ(ζ)为huber核函数的概率密度函数矩阵;
30、拉普拉斯函数、混合核函数与高斯函数的容积卡尔曼滤波的误差协方差矩阵的pk|k-1状态和观测噪声矩阵的rk的状态更新计算公式为:
31、
32、
33、cy、cx为拉普拉斯函数、混合核函数与高斯函数计算出的相关熵矩阵;
34、进行状态更新,计算出状态与量测的互协方差矩阵量测预测协方差矩阵伪测量矩阵hk、卡尔曼滤波增益kk;
35、完成状态更新,计算出更新后的状态更新后的误差协方差矩阵pk|k。
36、本发明具有以下有益效果:
37、1、采用焊接强光专用相机像素级的定位精度和惯性传感器进行融合,惯性传感器可以捕获整个运动过程的加速度、角速度、磁场、姿态,相机可以保证定位误差为毫米级的定位误差,由基于最大相关熵准则的鲁棒卡尔曼滤波对以上传感器采集的数据进行速度解算,保证速度解算精度满足焊接工况的需求。
38、2、本发明采用的基于最大相关熵准则的鲁棒卡尔曼滤波为基准,可有效滤除非线性运动过程的非高斯噪声,满足了对焊接速度实时监测的需求。
39、3、本发明使用训练好的卷积神经网络根据输入的不同选取最合适的鲁棒核进行噪声的滤除,提升了噪声的滤除效果,保证了焊接速度解算的精确性。
40、4、本发明使用训练好的卷积神经网络根据输入的不同选择不同的核带宽和调节参数,实现了自适应选取核带宽和调节参数,提升了算法的稳定性,提升了噪声滤除的能力,保证了焊接速度解算具有良好的精度和鲁棒性。
41、5、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照附图,对本发明作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!