一种面齿轮测量误差优化及计算方法、系统、设备及介质
本发明涉及面齿轮误差优化计算,尤其是涉及一种面齿轮测量误差优化及计算方法、系统、设备及介质。
背景技术:
1、面齿轮传动是一种圆柱齿轮和面齿轮相啮合的传动。面齿轮可以看作锥齿轮的一种特殊形式,其传动装置具有体积小、重合度大、质量轻、振动噪声小等优点,在航空领域的应用显得尤为突出。国内外对面齿轮的研究正在不断扩大,且面齿轮传动已经成功地应用到了军用领域和民用领域。
2、但是通过三坐标测量机的测量方法测量面齿轮时,不能兼顾测量面齿轮各项误差;同时三坐标测量机的测量方法对实测数据也没有相应的配套优化方法。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种面齿轮测量误差优化及计算方法、系统、设备及介质,能够优化面齿轮测量的实测数据得到修正数据,同时能够准确计算得到修正数据的测量误差,提高测量结果准确度的同时提供了误差数据。
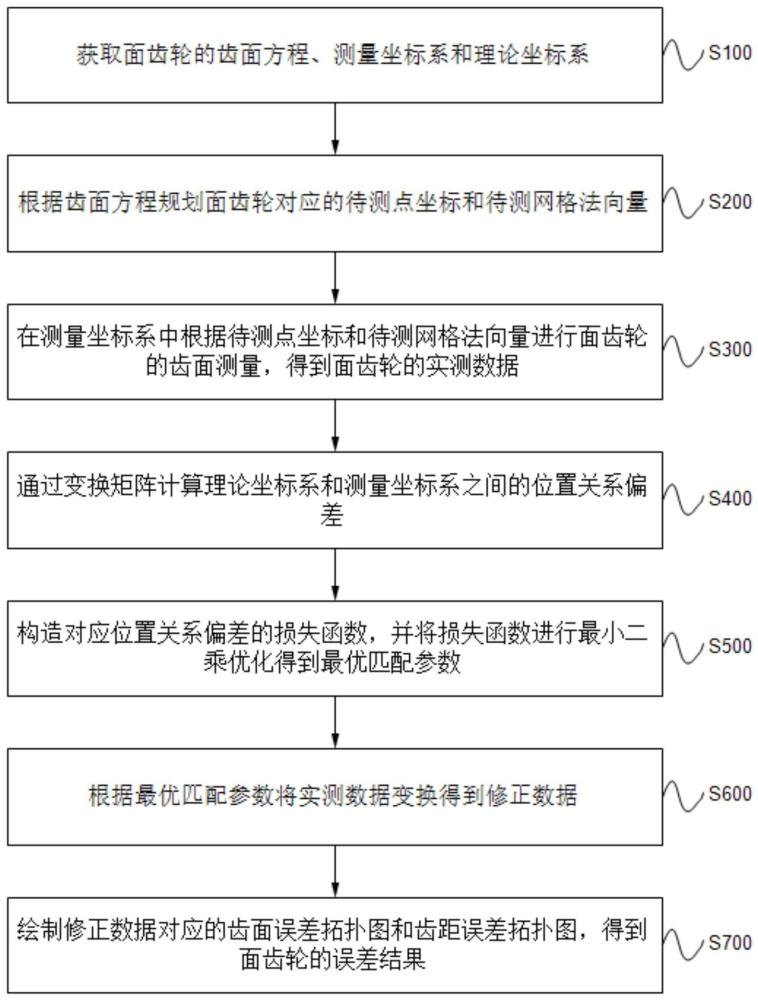
2、第一方面,本发明的实施例提供了一种面齿轮测量误差优化及计算方法,包括:
3、获取面齿轮的齿面方程、测量坐标系和理论坐标系;
4、根据所述齿面方程规划所述面齿轮对应的待测点坐标和待测网格法向量;
5、在所述测量坐标系中根据所述待测点坐标和所述待测网格法向量进行所述面齿轮的齿面测量,得到所述面齿轮的实测数据;
6、通过变换矩阵计算所述理论坐标系和所述测量坐标系之间的位置关系偏差;
7、构造对应所述位置关系偏差的损失函数,并将所述损失函数进行最小二乘优化得到最优匹配参数;
8、根据所述最优匹配参数将所述实测数据变换得到修正数据;
9、绘制所述修正数据对应的齿面误差拓扑图和齿距误差拓扑图,得到所述面齿轮的误差结果。
10、根据本发明实施例的方法,至少具有如下有益效果:
11、本方法首先通过齿面方程规划了待测点坐标和待测网格法向量,能够通过待测点坐标和待测网格法向量确定测量的理论路径,合理规划单侧齿面,提高测量效率;其次通过变换矩阵计算理论坐标系和测量坐标系之间的位置关系偏差,通过两个坐标系之间的位置关系偏差数据来优化实测数据,能够使得实测数据更靠近理论数据,提高实测数据的准确度;然后通过构造位置关系偏差的损失函数,并使用最小二乘优化得到最优匹配参数,能够简便求得最优匹配参数,同时也是最优的参数拟合结果;根据最优匹配参数将实测数据变换得到修正数据,提高了面齿轮测量的准确度,减小测量误差;最后通过拓扑图的方式绘制求得面齿轮的误差结果,能够适应三坐标测量机测量的任务场景,同时误差结果也更加直观有效。
12、根据本发明的一些实施例,所述根据所述齿面方程规划所述面齿轮对应的待测点坐标和待测网格法向量,包括:
13、获取所述面齿轮的单侧齿面部分;
14、将所述单侧齿面部分在预设的平面上投影,得到待测区域网格;
15、在所述待测区域网格上任取一旋转点,并将所述旋转点绕所述面齿轮的轴线旋转,得到所述旋转点与所述单侧齿面部分相交的待测点;
16、根据所述旋转点与所述单侧齿面部分相交的关系,计算得到所述待测点坐标和所述待测网格法向量;所述旋转点与所述单侧齿面部分相交的关系通过如下公式表示:
17、
18、其中,rf表示待测点的齿面方程表示,zj表示旋转点的数轴坐标,xi表示旋转点的横轴坐标,表示待测网格法向量。
19、根据本发明的一些实施例,所述通过变换矩阵计算所述理论坐标系和所述测量坐标系之间的位置关系偏差的计算公式包括:
20、m1=rx(δx)·ry(δy)·rz(δz)·t(dx,dy,dz)
21、=m(dx,dy,dz,δx,δy,δz)
22、其中,m1表示变换矩阵,rx、ry和rz分别表示绕横轴、纵轴和竖轴旋转的变换矩阵,t表示平移矩阵。
23、根据本发明的一些实施例,所述构造对应所述位置关系偏差的损失函数,并将所述损失函数进行最小二乘优化得到最优匹配参数,包括:
24、根据所述位置关系偏差将所述待测点坐标变换到所述理论坐标系,得到理论待测点坐标;
25、通过所述理论待测点坐标构造所述损失函数;其中,所述损失函数的计算公式包括:
26、
27、其中,loss表示损失函数,m和n分别表示网格的长和宽,pt(i,j)表示测量坐标系下的待测点坐标,p′m(i,j)表示理论坐标系下的待测点坐标;
28、对所述损失函数进行最小二乘优化,得到最优匹配参数。
29、根据本发明的一些实施例,所述对所述损失函数进行最小二乘优化的计算公式包括:
30、
31、根据本发明的一些实施例,所述绘制所述修正数据对应的齿面误差拓扑图和齿距误差拓扑图,包括:
32、获取所述面齿轮的左右齿面中心点;所述左右齿面中心点作为齿面误差和齿距误差的基准;
33、根据所述修正数据和所述左右齿面中心点绘制所述齿面误差拓扑图;
34、根据所述左右齿面中心点计算理论圆弧距离,并根据所述修正数据计算实际圆弧距离;
35、通过所述理论圆弧距离和所述实际圆弧距离的差值绘制得到所述齿距误差拓扑图。
36、根据本发明的一些实施例,所述根据所述最优匹配参数将所述实测数据变换得到修正数据的计算公式包括:
37、m2=rx(δx*)·ry(δy*)·rz(δz*)·t(dx*,dy*,dz*)
38、psm(i,j)=[pm(i,j),1]tm2
39、其中,m2表示最优匹配参数对应的变换矩阵,δx*、δy*、δz*、dx*、dy*、dz*分别表示对应δx、δy、δz、dx、dy、dz的最优匹配参数,psm(i,j)表示修正数据,[pm(i,j),1]t表示实测数据。
40、第二方面,本发明的实施例提供了一种面齿轮测量误差优化及计算系统,包括:
41、面齿轮数据获取模块,用于获取面齿轮的齿面方程、测量坐标系和理论坐标系;
42、齿面方程规划模块,用于根据所述齿面方程规划所述面齿轮对应的待测点坐标和待测网格法向量;
43、实测数据计算模块,用于在所述测量坐标系中根据所述待测点坐标和所述待测网格法向量进行所述面齿轮的齿面测量,得到所述面齿轮的实测数据;
44、位置关系偏差计算模块,用于通过变换矩阵计算所述理论坐标系和所述测量坐标系之间的位置关系偏差;
45、最优匹配参数计算模块,用于构造对应所述位置关系偏差的损失函数,并将所述损失函数进行最小二乘优化得到最优匹配参数;
46、修正数据计算模块,用于根据所述最优匹配参数将所述实测数据变换得到修正数据;
47、误差结果计算模块,用于绘制所述修正数据对应的齿面误差拓扑图和齿距误差拓扑图,得到所述面齿轮的误差结果。
48、第三方面,本发明的实施例提供了一种电子设备,包括至少一个控制处理器和用于与所述至少一个控制处理器通信连接的存储器;所述存储器存储有可被所述至少一个控制处理器执行的指令,所述指令被所述至少一个控制处理器执行,以使所述至少一个控制处理器能够执行如第一方面所述的面齿轮测量误差优化及计算方法。
49、第四方面,本发明的实施例提供了一种计算机存储介质,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如第一方面所述的面齿轮测量误差优化及计算方法。
50、需要注意的是,本发明的第二方面至第四方面与现有技术之间的有益效果与第一方面的面齿轮测量误差优化及计算方法的有益效果相同,此处不再细述。
51、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
- 还没有人留言评论。精彩留言会获得点赞!