图像分割方法及装置与流程
本发明涉及图像处理,尤其涉及一种图像分割方法及装置。
背景技术:
1、作为主要的公共交通工具,轨道交通的安全性不可忽视,而影响轨道交通安全的主要问题之一为沿线环境异物入侵。
2、为了有效轨道交通中列车的运行安全,并提高在信号系统故障下的运营效率,当前轨道交通中的多数列车均配备了车载感知系统,基于雷达、红外、机器视觉等各种方式融合检测轨道障碍物。主流的感知框架是通过图像分割算法预先分割出轨道图像,然后通过雷达探测已分割的轨道区域,检测列车前行轨道是否有障碍物。因此,图像分割的效果将直接影响到感知系统的感知结果。为了保障安全性,亟需一种可靠且精准的图像分割方案为感知系统提供支撑。
技术实现思路
1、针对现有技术存在的问题,本发明实施例提供一种图像分割方法及装置。
2、本发明提供一种图像分割方法,包括:
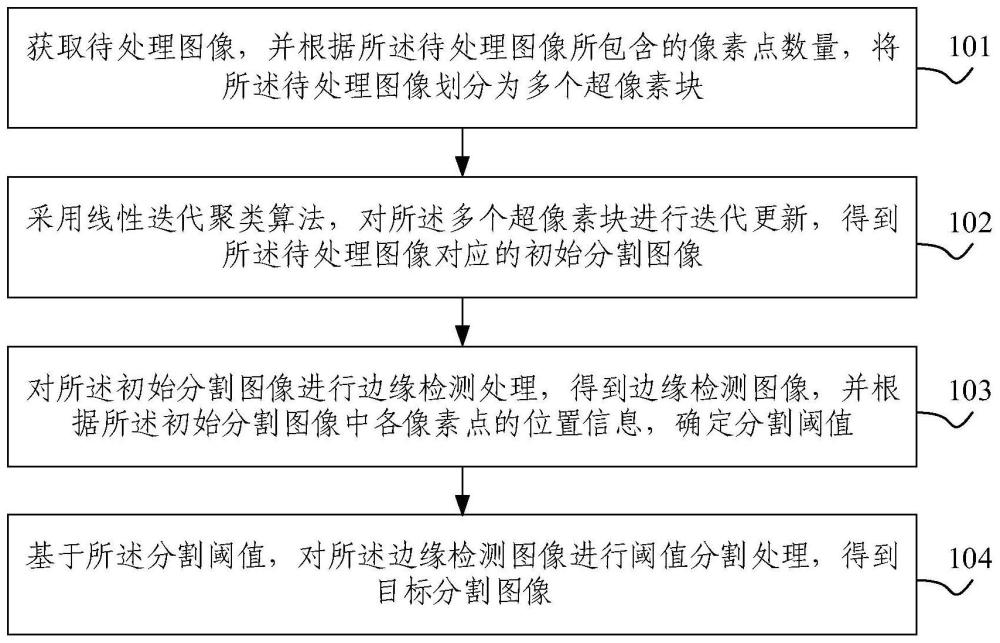
3、获取待处理图像,并根据所述待处理图像所包含的像素点数量,将所述待处理图像划分为多个超像素块;
4、采用线性迭代聚类算法,对所述多个超像素块进行迭代更新,得到所述待处理图像对应的初始分割图像;
5、基于所述分割阈值,对所述边缘检测图像进行阈值分割处理,得到目标分割图像。
6、根据本发明提供的一种图像分割方法,所述采用线性迭代聚类算法,对所述多个超像素块进行迭代更新,得到所述待处理图像对应的初始分割图像,包括:
7、获取所述待处理图像中各像素点的位置信息和色彩信息,并设置各所述像素点对应的距离和标签值;
8、遍历每个所述超像素块的聚类中心点,根据所述位置信息和所述色彩信息,计算各关联像素点分别与所述聚类中心点的相似度,根据各所述相似度,分别更新各所述关联像素点对应的距离和标签值;所述关联像素点为所述聚类中心点对应的搜索区域内的任一像素点;
9、在遍历次数小于次数阈值的情况下,继续执行所述遍历每个所述超像素块的聚类中心点,根据所述位置信息和所述色彩信息,计算所述聚类中心点与各关联像素点的相似度,根据各所述相似度,分别更新各所述关联像素点对应的距离和标签值的步骤;
10、在所述遍历次数等于所述次数阈值的情况下,根据各所述像素点对应的所述距离和所述标签值,确定初始分割图像。
11、根据本发明提供的一种图像分割方法,所述根据所述位置信息和所述色彩信息,计算各关联像素点分别与所述聚类中心点的相似度,包括:
12、对于每个所述关联像素点执行以下步骤:
13、根据所述聚类中心点的色彩信息和所述关联像素点的色彩信息,计算所述聚类中心点与所述关联像素点的色彩空间距离;根据所述聚类中心点的位置信息和所述关联像素点的位置信息,计算所述聚类中心点与所述关联像素点的空间坐标距离;
14、根据所述色彩空间距离和所述空间坐标距离,计算所述聚类中心点与所述关联像素点的相似度。
15、根据本发明提供的一种图像分割方法,所述距离的初始值为无穷大,所述标签值的初始值为负数;
16、相应地,所述根据各所述相似度,分别更新各所述关联像素点对应的距离和标签值,包括:
17、针对每个所述关联像素点,若所述关联像素点对应的所述相似度小于所述关联像素点对应的距离,则将所述相似度作为所述关联像素点对应的距离,并将所述聚类中心点的序号作为所述关联像素点对应的标签值。
18、根据本发明提供的一种图像分割方法,所述对所述初始分割图像进行边缘检测处理,得到边缘检测图像,包括:
19、对所述初始分割图像进行高斯滤波平滑处理,得到平滑分割图像;
20、计算所述平滑分割图像中各像素点对应的图像梯度,并根据所述图像梯度确定所述平滑分割图像中的各初始区域边缘像素点;
21、对各所述初始区域边缘像素点进行过滤、筛选和边界跟踪处理,得到包含各目标区域边缘像素点的边缘检测图像。
22、根据本发明提供的一种图像分割方法,所述对各所述初始区域边缘像素点进行过滤、筛选和边界跟踪处理,得到包含各目标区域边缘像素点的边缘检测图像,包括:
23、采用非极大值抑制策略,对各所述初始区域边缘像素点进行非边缘过滤处理,得到各备用区域边缘像素点;
24、基于预设的双阈值,对各所述备用区域边缘像素点进行边缘筛选处理,得到各候选区域边缘像素点;
25、采用滞后边界跟踪算法,对各所述候选区域边缘像素点进行边界跟踪处理,得到各目标区域边缘像素点;
26、根据各所述目标区域边缘像素点和所述平滑分割图像,得到边缘检测图像。
27、根据本发明提供的一种图像分割方法,所述图像梯度包括梯度幅值和梯度方向;
28、相应地,所述采用非极大值抑制策略,对各所述初始区域边缘像素点进行非边缘过滤处理,得到各备用区域边缘像素点,包括:
29、针对各所述初始区域边缘像素点执行以下步骤:
30、确定所述初始区域边缘像素点对应的至少一个目标像素点,所述目标像素点与所述初始区域边缘像素点相邻,且所述目标像素点对应的梯度方向与所述初始区域边缘像素点的梯度方向相同;
31、若各所述目标像素点对应的梯度幅值均小于或等于所述初始区域边缘像素点对应的梯度幅值,则将所述初始区域边缘像素点作为备用区域边缘像素点。
32、根据本发明提供的一种图像分割方法,所述根据所述初始分割图像中各像素点的位置信息,确定分割阈值,包括:
33、针对所述初始分割图像中的每个超像素分割区域执行以下步骤:
34、对所述超像素分割区域中各像素点的位置信息进行均值计算和方差计算,得到所述超像素分割区域对应的均值和方差;
35、将所述超像素分割区域对应的均值和方差进行加权求和,得到所述超像素分割区域对应的分割阈值。
36、根据本发明提供的一种图像分割方法,所述基于所述分割阈值,对所述边缘检测图像进行阈值分割处理,得到目标分割图像,包括:
37、针对所述边缘检测图像中的各超像素分割区域,根据所述超像素分割区域的分割阈值,对所述超像素分割区域进行阈值分割处理,得到目标分割图像。
38、本发明还提供一种图像分割装置,包括:
39、获取模块,被配置为获取待处理图像,并根据所述待处理图像所包含的像素点数量,将所述待处理图像划分为多个超像素块;
40、更新模块,被配置为采用线性迭代聚类算法,对所述多个超像素块进行迭代更新,得到所述待处理图像对应的初始分割图像;
41、检测模块,被配置为对所述初始分割图像进行边缘检测处理,得到边缘检测图像,并根据所述初始分割图像中各像素点的位置信息,确定分割阈值;
42、分割模块,被配置为基于所述分割阈值,对所述边缘检测图像进行阈值分割处理,得到目标分割图像。
43、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述图像分割方法。
44、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述图像分割方法。
45、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述图像分割方法。
46、本发明提供的图像分割方法及装置,通过获取待处理图像,并根据所述待处理图像所包含的像素点数量,将所述待处理图像划分为多个超像素块;采用线性迭代聚类算法,对所述多个超像素块进行迭代更新,得到所述待处理图像对应的初始分割图像;对所述初始分割图像进行边缘检测处理,得到边缘检测图像,并根据所述初始分割图像中各像素点的位置信息,确定分割阈值;基于所述分割阈值,对所述边缘检测图像进行阈值分割处理,得到目标分割图像。本发明通过线性迭代聚类算法,可以精准地对待处理图像进行图像分割,同时,为了进一步提高图像分割的效果,保障分割精度,利用基于阈值的图像分割和基于边缘的图像分割优化了分割图像的效果,以减少线性迭代聚类算法带来的超像素过割。
- 还没有人留言评论。精彩留言会获得点赞!