一种基于神经网络的农机轨迹时空特性提取与行为识别方法与流程
本发明属于基于特定计算模型的农机轨迹识别,更具体地,涉及一种基于神经网络的农机轨迹时空特性提取与行为识别方法。
背景技术:
1、随着农业现代化进程的不断推进,农业经营方式正在逐渐从个体种植向集体种植方式演变。在这一转变过程中,农业机械化作为关键因素之一,其作业轨迹产生了大量的数据资源,这些农机轨迹数据记录着农机在田间的具体运行路径、作业速度、时间和其他关键参数,成为了现代精准农业研究和管理的宝贵资产。通过深入分析这些数据,可以极大地提高农业生产的效率和可持续性,推动农业向更智能、高效的方向发展。有效的农机作业行为识别(即根据农机轨迹将农机作业分类为田间作业或道路运输)有助于准确估算农田面积,从而有效地对农业生产资料(如种子、肥料等)的投入量、农业机械的运行时间以及农业机械运行产生的成本进行预算,从而进一步降低农业生产成本。
2、随着全球导航卫星定位系统(gnss)技术的发展和应用,农业机械的自动化水平有了显著提升,gnss技术通过卫星信号定位和时间同步,使得农业机械能够在田间作业过程中实现精确定位和轨迹规划。因此,通过从全球导航卫星系统获取的农机gnss轨迹数据来区分机器是在道路上行驶还是在田地里工作的分类,对当前农业机械服务的有效管理至关重要。
3、目前,基于农机gnss轨迹数据的田间-道路作业行为识别研究主要分为传统机器学习方法和深度学习方法两种方法。首先是基于传统机器学习的方法,poteko从原始轨迹数据中提取运动特征(速度、加速度和方向变化等),然后输入至决策树(decision tree)算法中进行作业行为识别。该方法忽略了gnss轨迹的空间特征,使得识别准确率无法进一步提高。为此,陈瑛提出了一种基于运动特征和空间关系相结合的方法来进行田间-道路行为的识别。首先,通过dbscan算法来考虑点之间的空间关系实现运动行为的初步识别,然后再通过两个基于运动特征的推理规则(dbscan+rules)对前一步的结果进行纠正,以得到更准确的识别结果。
4、然而,上述方法在深层特征提取上具有困难,忽略轨迹数据间的空间与时间关系,并且调参复杂,捕获下文信息能力较低,难以实现。
技术实现思路
1、本发明旨在克服上述现有技术的至少一种缺陷,提供一种基于神经网络的农机轨迹时空特性提取与行为识别方法,以解决现有技术在深层特征提取上具有困难,忽略轨迹数据间的空间关系,并且调参复杂,难以实现准确且实时的田间-道路行为识别等问题。
2、本发明研究一种通过时间序列模型和改进的神经网络相结合的方法实现同时提取农机轨迹点间的时间特征和空间特征,从而进一步提高农机田间-道路划分的精度与效率,进而精准推算农田作业面积,降低农业生产成本,提高农机通过率。
3、本发明详细的技术方案如下:
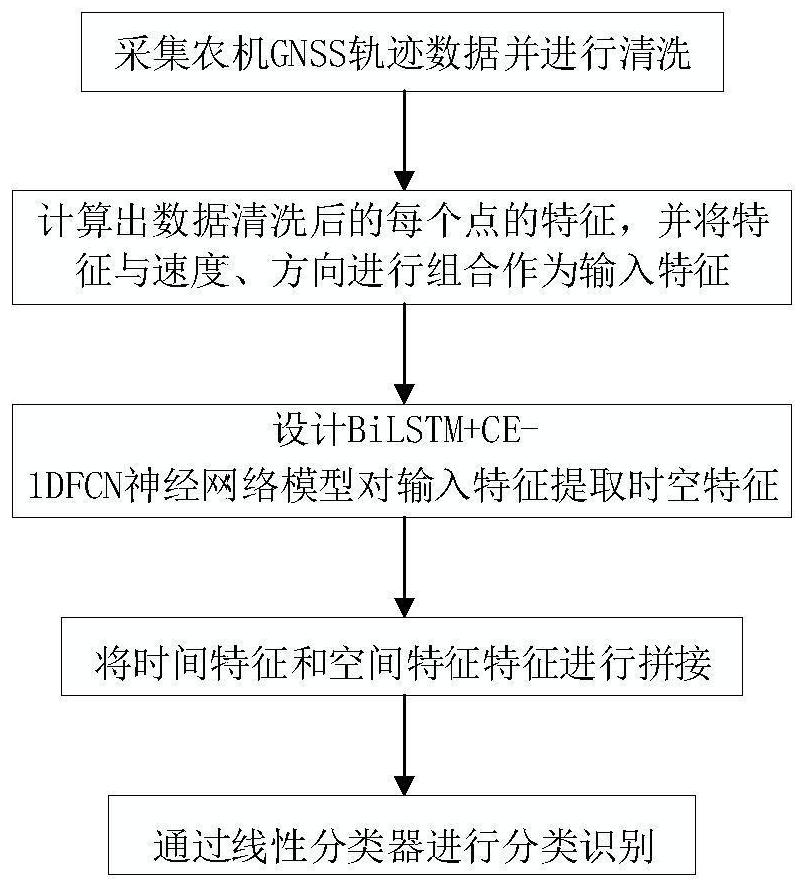
4、s1、采集农机gnss轨迹点得到轨迹数据集合,并对轨迹数据集合进行清洗操作;
5、s2、计算出清洗操作后的轨迹数据集合每个轨迹点的特征,并将特征与速度、方向进行组合作为输入特征;
6、s3、设计bilstm+ce-1dfcn神经网络模型对输入特征提取时间特征和空间特征;
7、s4、将提取的时间特征和空间特征通过特征拼接操作得到融合特征;
8、s5、基于特征拼接后的融合特征,通过线性分类器进行田间和道路的分类;
9、进一步地,所述对数据进行清洗操作,由于gnss接收器存在信号差和断电等问题,这会造成所采集的数据中存在一些异常点,即漂移点和离散点;因此,我们对数据集合中的数据进行去除噪声点、离散点和漂移点操作,以提高数据的质量,具体包括:
10、s11、所述农机gnss轨迹数据的每个轨迹点包含经度、纬度、时间戳、速度和方向信息;
11、gnss信号噪声在gnss轨迹点采集过程中是不可避免的,为了减轻信号噪声的影响,检测噪声点并对每个噪声点使用最近邻平滑法,用相邻点的地理空间坐标均值替换原本地理空间坐标;
12、s12、农业机械停放在道路上或驶入/驶出车库时,轨迹点与农业机械的实际位置之间会存在轻微偏差,故需要将其中的离散点去除;通过z-score的统计方法,计算轨迹点的均值和标准差,对每个轨迹点使用以下公式计算z即z-score:
13、
14、公式(1)中,x代表轨迹点的位移;μ代表所有轨迹点位移的平均值;σ代表所有轨迹点位移的标准差,用于衡量数据点的离散程度或分散度;
15、z-score是一个标准化的分数,表示数据点相对于均值的偏离程度,设置z-score阈值,将z-score的绝对值超过z-score阈值的轨迹点标记为离散点,然后将标记的离散点选择从轨迹数据集合中移除;
16、s13、去除漂移点;
17、根据差分法,计算相邻轨迹点之间的速度差分和方向差分,得到差分数据;
18、对计算得到的差分数据使用指数加权平均来平滑数据:对按时间排序的轨迹数据中越新的轨迹点赋予越高权重;
19、将速度差分和方向差分分别乘以设置的权重并求和,然后除以权重的总和,得到最终差分值,以减少噪声和不必要的波动;
20、设定差分阈值,当最终差分值超过差分阈值时标记为漂移点,然后将漂移点从轨迹数据集合中移除。
21、所述s1还包括在进行数据清洗操作后进行数据分割:
22、将数据清洗操作后的轨迹数据集合随机划分为三个子集,80%作为训练集用于训练,10%作为验证集用于验证,10%作为测试集用于测试;
23、使用验证集对训练过程中的模型进行性能评估,使用以下四个评估指标:精确度precision,召回率recall,f1得分f1-score和准确率accuracy;
24、
25、
26、
27、
28、公式(11)-(14)中,“田间”点被视为“p,positive,正例”,“道路”点被视为“n,negative,负例”;tp代表被正确分类为“田间”的田间点;tn代表被正确分类为“道路”的道路点;fp代表被错误分类为“田间”的道路点;fn代表被错误分类为“道路”的田间点。
29、所述计算出数据清洗后的农机gnss轨迹每个轨迹点的特征,并将特征与速度、方向进行组合作为输入特征具体包括:
30、s21、基于清洗操作后的轨迹数据集合,计算出每个轨迹点的加速度、角速度、方向差、角速度差和位移五个特征:
31、
32、
33、δθi=θi-θi-1 (4);
34、
35、δlati=lati-lati-1,δloni=loni-loni-1 (6):
36、
37、
38、di=r×c,r=6371000 (9);
39、公式(2)-(9)中,α,v,ω,θ,a,lat,lon,d分别表示加速度,速度,角速度,方向,角速度差,纬度,经度,位移;下标i表示第i个轨迹点;δθi,δlati,δloni分别表示第i个轨迹点的方向差,纬度差,经度差;t为时间,b、c、r为计算过程中的变量符号;
40、s22、将每个轨迹点的加速度、角速度、方向差、角速度差和位移五个特征与速度、方向进行组合作为输入特征。
41、所述设计bilstm+ce-1dfcn神经网络模型对gnss轨迹提取时间特征和空间特征,设计了一种bilstm+ce-1dfcn神经网络模型以提升对gnss轨迹时空特征提取的能力,该模型融合了双向长短期记忆网络(bilstm)和经过增强ui改进的一维卷积的全卷积网络(ce-1dfcn),ce-1dfcn网络通过引入标准卷积残差块和自注意力机制,专门用于挖掘轨迹数据的空间特征;
42、这种结合不仅提高了模型对时间和空间特征的捕捉能力,也显著增强了对复杂gnss轨迹数据的理解和分析能力,通过将轨迹数据分别输入到这两个网络,模型能够全面地分析并综合时间和空间维度的信息,从而实现对gnss轨迹数据更深层次的理解;
43、双向长短期记忆网络(bilstm)作为一种时间序列模型,能够捕捉轨迹数据中的过去和未来时间依赖关系,从而提供更深入的信息;全卷积网络(fcn)作为一种深度学习神经网络,对图像数据进行局部的空间特征的提取,然而传统的fcn网络是基于二维卷积设计的,这种二维卷积难以提取时间序列数据的局部空间特征,因此,本发明研究一种基于一维卷积(1d-cnn)的fcn网络,即1dfcn,并在1dfcn中加入标准卷积残差块和自注意力机制(ce-1dfcn),用于从轨迹数据中提取局部空间特征;具体包括:
44、s31、基于bilstm网络的时间特征提取:
45、所述bilstm网络包括两个lstm模块即前向lstm和后向lstm,对时间序列数据进行双向建模,并且对输入特征进行时间特征的提取;
46、s32、基于ce-1dfcn网络的空间特征提取:
47、全卷积网络(fcn)是一种基于二维卷积(2d-cnn)设计的深度学习模型,广泛应用于图像的特征提取任务,然而该网络中的二维卷积难以提取时间序列数据的空间特征;ce-1dfcn网络以fcn网络的框架为基础,将fcn网络中的二维卷积替换为一维卷积;
48、所述ce-1dfcn网络包括编码器部分和解码器部分,编码器部分经过卷积和池化操作,用于压缩和提取特征,解码器对编码器部分压缩和提取特征进行上采样和重构;
49、为了进一步提高模型提取特征的能力,在解码器中每进行一次上采样时,添加一个自注意力层后,再加入一个标准卷积残差块,有助于在扩大数据维度的同时保留和增强特征信息;并且在解码器中进行上采样后,有助于模型在融合残差信息之前,首先关注到重要的特征,丰富底层特征图的语义信息,提高模型捕获全文上下文信息的能力,防止过拟合,提高模型的鲁棒性。
50、所述通过线性分类器进行田间和道路的分类具体包括:
51、基于融合特征,通过softmax将输出的原始分数转化为每个类别的概率最终选择概率最高的类别作为预测结果,即田间或道路;
52、
53、公式(10)中,w为可训练权值,b为偏置。
54、与现有技术相比,本发明的有益效果为:
55、(1)本发明提供的一种基于神经网络的农机轨迹时空特性提取与行为识别方法,通过改进的深度神经网络模型(bilstm+ce-1dfcn)从gnss轨迹数据中分别提取数据的时间特征和空间特征,并进行融合用于田间-道路分类,实现农机作业行为识别准确率的提高。
56、(2)本发明提供的一种基于神经网络的农机轨迹时空特性提取与行为识别方法,本发明将传统fcn网络设计为基于一维卷积的结构,使其能够实现对gnss轨迹数据进行空间特征的提取,此外,我们在网络中引入了标准卷积残差块和自注意力机制,以增强底层特征图的语义信息,并提高模型捕获全文上下文信息的能力。
- 还没有人留言评论。精彩留言会获得点赞!