语义分割方法、装置、作业机械、设备及介质与流程
本发明涉及数据处理,尤其涉及一种语义分割方法、装置、作业机械、设备及介质。
背景技术:
1、在自动驾驶领域,对环境的正确感知非常重要,具体通过语义分割的技术手段,来感知作业机械的环境信息。
2、对于语义分割,现有技术更关注其分割的准确性和分割精度。具体通过深度模型进行训练,得到目标模型;在作业机械上安装多个传感器,将多个传感器采集的数据传输到目标模型中,得到目标模型输出的语义分割结果。
3、现有技术利用目标模型进行语义分割的方式,需要处理大量的数据和执行大量的算法操作,占用了大量的资源,并降低了语义分割的实时性。
技术实现思路
1、本发明实施例提供一种语义分割方法、系统、作业机械、设备及介质,用以解决现有技术中利用训练的深度模型进行语义分割时出现的资源被大量占用,以及语义分割实时性低的缺陷,实现快速、精准的完成语义分割。
2、本发明实施例提供一种语义分割方法,包括:
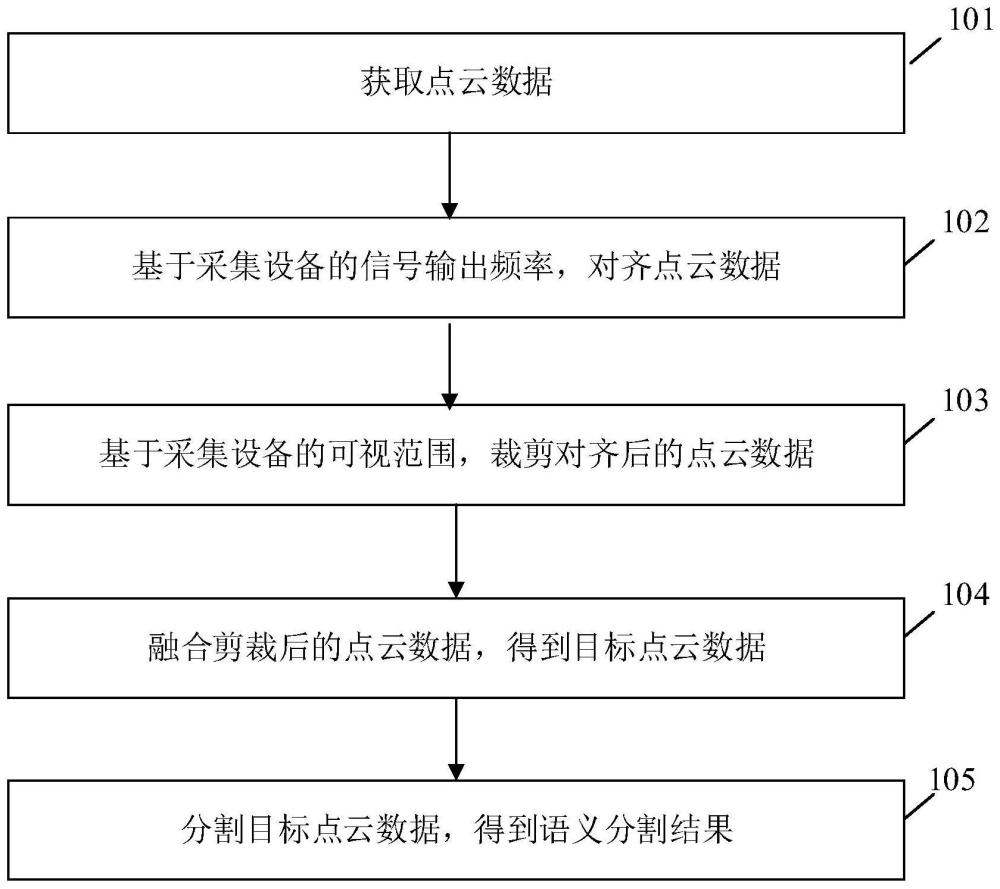
3、获取点云数据,其中,所述点云数据通过至少两个采集设备采集作业机械所在的作业场景得到;
4、基于所述采集设备的信号输出频率,对齐所述点云数据,其中,每个所述采集设备的所述信号输出频率一致;
5、基于所述采集设备的可视范围,裁剪对齐后的所述点云数据;
6、融合剪裁后的所述点云数据,得到目标点云数据;
7、分割所述目标点云数据,得到语义分割结果。
8、根据本发明实施例的语义分割方法,所述获取点云数据之后,还包括:
9、存储所述点云数据至存储结构;
10、所述基于所述采集设备的信号输出频率,对齐所述点云数据,包括:
11、在确定所述存储结构的元素位置写满的情况下,基于所述信号输出频率从所述存储结构中提取所述点云数据;
12、针对每次提取所述点云数据的提取操作执行以下处理过程:
13、记录提取操作的时间点,将所述时间点作为提取的所述点云数据的最终的时间点。
14、根据本发明实施例的语义分割方法,所述存储结构包括:队列,其中,一个所述采集设备对应一个所述队列;
15、所述在确定所述存储结构的元素位置写满的情况下,基于所述信号输出频率从所述存储结构中提取所述点云数据,包括:
16、在确定所述队列同时不为空的情况下,利用预先创建的调度算法,从所述队列中提取所述点云数据,其中,所述调度算法的调用频率和所述信号输出频率一致;
17、所述从所述队列中提取所述点云数据之后,还包括:
18、清空所述队列。
19、根据本发明实施例的语义分割方法,所述清空所述队列之后,还包括:
20、在预设时长内存在任意一个或多个队列为空的情况下,执行所述清空所述队列的操作;
21、其中,所述预设时长用户基于实际需求设置。
22、根据本发明实施例的语义分割方法,所述基于所述采集设备的可视范围,裁剪对齐后的所述点云数据,包括:
23、确定每个所述采集设备的可视范围;
24、基于每个所述可视范围,以及预先标定的所述采集设备的位置关系,对对齐后的所述点云数据进行拼接和去重操作,得到裁剪后的所述点云数据。
25、根据本发明实施例的语义分割方法,所述分割所述目标点云数据,得到语义分割结果之前,还包括:
26、确定当前设备部署的系统框架,其中,所述设备用于部署语义分割模型;
27、基于所述系统框架,部署所述语义分割模型。
28、根据本发明实施例的语义分割方法,所述分割所述目标点云数据,得到语义分割结果,包括:
29、将所述目标点云数据输入至预先创建的语义分割模型,得到所述语义分割模型输出的所述语义分割结果;
30、其中,所述语义分割模型基于目标点云数据样本和语义分割结果样本训练得到。
31、根据本发明实施例的语义分割方法,所述分割所述目标点云数据,得到语义分割结果之后,还包括:
32、在确定所述语义分割结果的准确度大于或等于预设值的情况下,输出所述语义分割结果;
33、在确定所述语义分割结果的准确度小于所述预设值的情况下,优化所述语义分割结果,得到最终的语义分割结果。
34、本发明实施例提供一种语义分割装置,包括:
35、获取模块,用于获取点云数据,其中,所述点云数据通过至少两个采集设备采集作业机械所在的作业场景得到;
36、对齐模块,用于基于所述采集设备的信号输出频率,对齐所述点云数据,其中,每个所述采集设备的所述信号输出频率一致;
37、裁剪模块,用于基于所述采集设备的可视范围,裁剪对齐后的所述点云数据;
38、融合模块,用于融合剪裁后的所述点云数据,得到目标点云数据;
39、分割模块,用于分割所述目标点云数据,得到语义分割结果。
40、本发明实施例还提供一种作业机械,用于实现所述语义分割方法的步骤。
41、本发明实施例还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现所述语义分割方法的步骤。
42、本发明实施例还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述语义分割方法的步骤。
43、本发明实施例提供的语义分割方法、装置、作业机械、设备及介质,通过获取点云数据,该点云数据为至少两个采集设备采集的作业机械所在的作业场景得到;基于采集设备的信号输出频率对齐点云数据,每个采集设备的信号输出频率一致,本发明利用采集设备的信号输出频率的一致性,快速的完成点云数据的时间戳对齐;基于采集设备的可视范围,裁剪对齐后的点云数据,本发明利用采集设备的可视范围裁剪对齐后的点云数据,大大的减少了后期数据处理的数据量,提高了数据处理速度,减少了数据处理时的资源占用;融合剪裁后的点云数据,得到目标点云数据;分割目标点云数据,得到语义分割结果,本发明基于采集设备的信号输出频率和可视范围进行点云数据的处理,解决了现有技术中在利用目标模型进行语义分割时,产生的资源占用,和处理速度慢的问题,有效的提高了语义分割的实时性。
技术特征:
1.一种语义分割方法,其特征在于,包括:
2.根据权利要求1所述的语义分割方法,其特征在于,所述获取点云数据之后,还包括:
3.根据权利要求2所述的语义分割方法,其特征在于,所述存储结构包括:队列,其中,一个所述采集设备对应一个所述队列;
4.根据权利要求3所述的语义分割方法,其特征在于,所述清空所述队列之后,还包括:
5.根据权利要求1-4任一项所述的语义分割方法,其特征在于,所述基于所述采集设备的可视范围,裁剪对齐后的所述点云数据,包括:
6.根据权利要求1-4任一项所述的语义分割方法,其特征在于,所述分割所述目标点云数据,得到语义分割结果之前,还包括:
7.根据权利要求6所述的语义分割结果,其特征在于,所述分割所述目标点云数据,得到语义分割结果,包括:
8.根据权利要求1-4任一项所述的语义分割方法,其特征在于,所述分割所述目标点云数据,得到语义分割结果之后,还包括:
9.一种语义分割装置,其特征在于,包括:
10.一种作业机械,其特征在于,用于实现如权利要求1至8任一项所述的语义分割方法的步骤。
11.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至8任一项所述的语义分割方法的步骤。
12.一种非暂态计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8任一项所述的语义分割方法的步骤。
技术总结
本发明实施例提供一种语义分割方法、装置、作业机械、设备及介质,包括:获取点云数据,其中,点云数据通过至少两个采集设备采集作业机械所在的作业场景得到;基于采集设备的信号输出频率,对齐点云数据,其中,每个采集设备的信号输出频率一致;基于采集设备的可视范围,裁剪对齐后的点云数据;融合剪裁后的点云数据,得到目标点云数据;分割目标点云数据,得到语义分割结果。本发明用以解决现有技术中利用训练的深度模型进行语义分割时出现的资源被大量占用,以及语义分割实时性低的缺陷,实现快速、精准的完成语义分割。
技术研发人员:邓加成,许志坤,胡文斌
受保护的技术使用者:三一重机有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!