一种融合动力学的飞行器GNC系统可视化建模方法
本发明涉及飞行器制导控制系统建模仿真,尤其涉及一种融合动力学的飞行器gnc系统可视化建模方法。
背景技术:
1、飞行器制导、导航与控制(guidance、navigation and control,gnc)系统是飞行器中负责导航、制导和控制的集成系统,通过传感器获取飞行器的状态和环境信息,根据预定的飞行任务计算出控制指令,再将这些指令传达给飞行器的各个执行机构,以实现飞行器的精准导航、稳定飞行和精确控制。实际上,由于飞行器处在高度动态和复杂环境中,飞行器系统通常要面临各种不确定性和非线性耦合的情况,而且飞行器本身的动力学模型也是非线性的,包括气动力学模型、惯性力和推力模型的非线性效应;此外,飞行器gnc系统中有多个传感器构成的分系统,这些分系统之间存在相互耦合的影响,这种多系统耦合效应增加了飞行器gnc系统的复杂性;飞行器gnc系统依赖于传感器获取环境信息,并通过执行器实现控制指令的执行,然而,传感器和执行器都受其自身限制且具有不确定性,如传感器噪声、采样频率限制、执行器动态响应等,上述因素均会导致飞行器gnc系统模型的不准确性和参数的不确定性,对建模和控制设计带来挑战。
2、解决gnc系统的建模问题需要综合运用数学建模、控制理论、传感器技术等多个学科的技术,为了在飞行器的总体设计阶段就尽可能真实地考虑制导控制系统性能在整体飞行过程中的影响,通常在设计初期进行数字实验验证和仿真分析,建立先进的数学仿真平台对控制系统进行充分的试验验证,这样可以在很大程度上优化控制系统的性能和鲁棒性,并在很大程度上加快型号研制速度,同时大幅减少型号的实弹试验次数。
3、现有的技术方案在进行飞行器gnc系统的设计建模时,由于gnc系统需要在不确定性、噪声、故障和干扰等条件下保持鲁棒性和可靠性,研究人员通常需要首先对各个分系统进行单独设计、开发鲁棒的控制算法及故障检测与恢复策略。同时,gnc系统设计又是一个十分依赖于飞行器上其他系统的过程,尤其是飞行器的总体设计以气动设计为初始点展开论证,gnc系统又作为分系统以气动设计为中心展开设计,这种设计思维忽略了气动总体和gnc分系统与单机之间的匹配关系。目前,现有的基于数学模型/半实物的仿真技术的制导系统,导引头、惯导和飞控系统之间在早期设计过程中偏向独立,缺少气动制导控制一体化的设计思想;现有的一般仿真过程均以简化独立模型为主,难以覆盖很多工程应用中的实际情况,仿真过程也相对繁杂,难以快速解决gnc系统设计中遇到的问题;目前尚未有一种包含制导飞行器的动力学、气动、制导控制、导引、决策模型的全面的可视化一体化建模方法。
技术实现思路
1、基于上述现状,本发明方法提供了一种融合动力学的飞行器gnc系统可视化建模方法,通过引入可视化建模仿真和动态数据表格,显式地考虑gnc系统中各个子系统与关联系统间的耦合影响,便于对不同构型的制导飞行器进行简化建模和仿真,使飞行器可以获得更好的飞行性能和制导精度。
2、为解决上述技术问题,本发明所采取的技术方案包括如下过程:
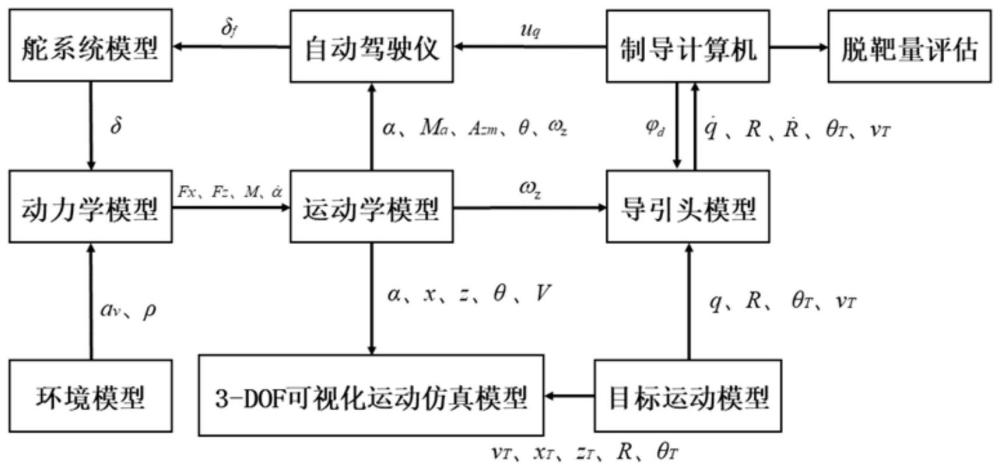
3、步骤1:设置飞行器的参数和气动系数,建立飞行器的动力学模型并确定动力学模型的输出参数,开放动力学模型的输入接口,利用动力学模型的输出参数建立运动学模型,输出飞行器的运动学参数;
4、步骤2:根据飞行器的使用需求建立环境模型、自动驾驶仪和舵系统模型,并将环境模型的输出接口和舵系统模型的输出接口均连接到动力学模型的输入接口,将飞行器的运动学参数输入自动驾驶仪,并将自动驾驶仪的输出接口连接到舵系统模型的输入接口,利用自动驾驶仪的输出控制舵系统模型;
5、步骤3:设置半实物指标,构建由探测器天线模块、雷达天线伺服框架模块和寄生回路组成的导引头模型,并将导引头模型与运动学模型连接;
6、步骤4:确定制导策略,搭建制导计算机,所述制导计算机输出导弹法向过载指令至自动驾驶仪模型,且所述制导计算机与步骤3中所搭建的导引头模型连接,制导计算机依据制导策略来调整导引头的工作模式,同时导引头根据跟踪目标的状态切换飞行器的飞行状态;此外,搭建引战系统的简化模型并设置起爆策略,计算脱靶量,飞行器的使用者根据脱靶量对制导过程进行脱靶量评估,并将该引战系统模型嵌套入制导计算机中;
7、步骤5:根据飞行器的任务需求,搭建目标运动模型,通过设置目标运动方位、目标过载限制和目标随机机动策略,解算弹目距离r和弹目视线角q,并输出给步骤3中所搭建的导引头模型;同时将目标弹道倾角θt和运动速度vt通过导引头模型输入到制导计算机中;构建3-dof可视化运动学模型,并将目标运动模型和运动学模型的输出作为3-dof可视化运动学模型的输入;
8、步骤6:连接上述所有模型,确定飞行器的任务条件和参数设置,模拟飞行器攻击目标的过程,实时解算弹道轨迹、需用过载和实际过载、瞬时脱靶量、飞行攻角、飞行马赫数、舵偏角参数;根据飞行器的任务需求检验飞行器gnc系统的性能,若飞行器gnc系统性能不达标,则需检查修改步骤1-5中的模型,并返回至步骤1,直至性能达标;
9、进一步的,所述步骤1包括:
10、步骤1.1:设置飞行器的参数和气动系数,并将飞行器的参数和气动系数转换到铅垂平面内,并形成数据表格;
11、所述飞行器的参数包括:飞行器的质量、飞行器的尺寸、飞行器绕各轴的转动惯量、弹体气动布局、弹体参考面积、舵面参考面积、飞行马赫数范围、飞行攻角范围、发动机推力曲线和大气环境参数、自动驾驶仪可调增益表的各项参数;
12、所述气动系数包括:弹体的气动力系数表和舵面的气动力系数表中的各项参数;
13、步骤1.2:对飞行器进行动力学建模,得到三自由度动力学模型,确定动力学模型的输出参数,包括:作用在弹体上的阻力、升力和俯仰力矩;
14、步骤1.3:根据动力学模型建立运动学模型,联立动力学模型和运动学模型,得到在惯性系下飞行器的运动学参数,包括:飞行器弹道倾角θ、姿态角速率ωz、质心位置(x,z)、速度v、马赫数ma、飞行攻角α、导弹法向过载azm;
15、所述三自由度动力学模型的数学模型表示为:
16、
17、其中fx、fz、m分别表示作用在弹体上的阻力、升力和俯仰力矩;cx、cz、cm均为无量纲的比例系数,分别表示阻力系数、升力系数和俯仰力矩系数,且上述三个比例系数均与飞行攻角α、舵偏角δ、飞行马赫数ma相关;sref为特征参考面积;dref为轴对称弹体的弹径;ρ为大气密度;v为飞行速度;
18、当飞行攻角和舵偏角满足不失速条件,同时在可控范围内,即-20°<α<20°,-30°<δ<30°且飞行马赫数ma<0.95时,cx、cz、cm如公式(2)所示:
19、
20、其中cx0为零升阻力系数;cz0为飞行器不对称时的升力系数项;cm0为零偏角俯仰力矩系数;为诱导阻力系数;为攻角升力系数;为攻角引起的俯仰力矩系数;为舵偏角阻力系数;为舵偏角升力系数;为俯仰操纵力矩系数;为弹体焦点到弹体质心的距离;
21、当飞行马赫数满足1.1<ma<4时,且飞行攻角和舵偏角满足-20°<α<20°,-30°<δ<30°时,用线性拟合曲线来逼近非线性气动系数,根据公式(3)将升力系数和俯仰力矩系数用飞行攻角和舵偏角的函数来表示:
22、
23、其中az、bz、cz、dz、am、bm、cm、dm均为无量纲系数;
24、进一步的,所述步骤2包括:
25、步骤2.1:构建环境模型,并将环境模型输出的当地声速av和大气密度ρ提供给动力学模型;
26、步骤2.2:根据运动学参数构建自动驾驶仪,得到三回路非线性自动驾驶仪的数学模型,并输出舵偏角指令δf;
27、步骤2.3:构建舵系统模型,利用舵偏角指令δf对舵系统模型进行控制,进而解算舵偏角δ并提供给动力学模型;
28、所述三回路非线性自动驾驶仪的数学模型表示为:
29、δf=k∫uqdt-kka∫azmdt+ki∫ωzdt+kgωz-kas(δf0-δl) (6)
30、其中δf为舵偏角指令;k、ka、ki、kg均为可变控制增益;kas为前馈抗饱和增益;uq为导弹法向过载指令;azm为导弹法向过载;ωz为姿态角速率;δf0-δl为指令超出最大舵偏角的量;
31、进一步的,所述步骤3包括:
32、步骤3.1:设置半实物指标,建立探测器天线模块,用以在导引头模型中模拟导引头的搜索和捕获过程,包括:弹目距离探测模块、相对速度探测滤波器和失调角滤波器模块;
33、其中所述弹目距离探测模块,用以解算弹目距离r;所述相对速度探测滤波器,用以对弹目距离r求微分并滤波输出,得到弹目相对速度所述失调角滤波器模块,用以对失调角信号进行滤波;
34、步骤3.2:设置导引头的跟踪回路时间常数t、回路交叉频率ts、稳定回路速率陀螺的自然频率ωng,在俯仰平面内构建雷达天线伺服框架模块,得到稳定回路和跟踪回路的数学模型;
35、步骤3.3:对导引头的寄生回路进行建模,将寄生回路引入稳定回路和跟踪回路的数学模型中,并通过调试跟踪回路时间常数t、回路交叉频率ts、稳定回路速率陀螺传递函数自然频率ωng和失调角滤波器带宽ωh以减小雷达天线伺服框架的运动中的干扰信号,得到构建好的导引头模型;
36、步骤3.4:根据导引头模型计算弹目视线角速率
37、进一步的,步骤3.2中所述的稳定回路和跟踪回路的数学模型表示为:
38、将导引头伺服角作为控制量,建立稳定回路和跟踪回路的传递函数模型:
39、
40、其中s为拉普拉斯算子;为导引头伺服框架角指令;为导引头伺服框架角的输出与输入的拉式变化之比;
41、进一步的,步骤3.3中所述的将寄生回路引入稳定回路和跟踪回路的数学模型中得到的模型为:
42、
43、其中kr为寄生回路增益;
44、进一步的,所述步骤4中还包括:在确定制导策略的过程中,将飞行器的飞行状态分为巡航阶段和末制导阶段,建立飞行器在末制导阶段的最优制导律为基于视线角速率设计的h∞制导律,所述基于视线角速率设计的h∞制导律数学模型表示为:
45、
46、其中r为弹目距离;q为弹目视线角;uq为导弹法向过载指令,并作为系统控制量对自动驾驶仪进行控制;wq为外部扰动项;
47、且有公式(12):
48、
49、其中vm为导弹速度;θ为飞行器弹道倾角;vt为目标速度;θt为目标弹道倾角;将vt-vm视为弹目相对速度也称为弹目距离的变化率;
50、进一步的,所述3-dof可视化运动学模型,用于接收目标运动模型中的目标位置(xt,zt)、目标运动速度vt、弹目距离r、目标弹道倾角θt,以及运动学参数中的姿态角θ、质心位置(x,z)、飞行速度v、飞行攻角α,以实时模拟制导飞行器打击目标的过程。
51、采用上述技术方案所产生的有益效果在于:
52、1、本发明方法可以快速有效及全面地对飞行器、导弹的gnc系统进行完善的建模并进行可视化数字仿真,为导弹设计过程中得到的动力学参数进行有效验证;在建模过程中构建了飞行器的动力学模型、运动学模型、环境模型、自动驾驶仪、舵系统模型、制导计算机、导引头模型、目标运动模型,并利用弹目间的三自由度可视化运动仿真模型进行可视化数字仿真,引入脱靶量来评估整体模型。该方法适用于对在大气层内飞行的各种制导飞行器、导弹的建模与仿真,以便在飞行器的早期设计阶段对其gnc系统进行充分的仿真验证。
53、2、本发明方法提出的设计与建模方法考虑全面,采用气动制导控制一体化的设计思想,应用简单,将飞行器的飞行与攻击过程简化到铅垂平面中,以三自由度的视角模拟飞行攻击过程,这样可以减轻整体系统仿真时庞大的运算压力,也便于对不同的制导飞行器进行快速建模仿真,同时便于发现设计过程中的问题,优化系统的性能和鲁棒性。
54、3、本发明方法使用仿真可视化的思想,在仿真过程中可以实时观测飞行器的飞行弹道与飞行姿态,并实时显示脱靶量、飞行攻角、法向过载数据,以便于解决在设计和仿真过程中的错误。
55、4、本发明方法使用了仿真数据可视化与制导控制一体化相结合的思想,能够有效进行快速建模,有效避免了部分非线性交叉耦合对gnc系统模型的影响。
56、5、本发明方法避免了分系统设计时接口封闭不兼容的问题,各模型的数据接口开放,可在仿真过程中随仿真评估效果在接口中实时动态调整各模型的数据,能对不同气动外形、不同制导体制的飞行器进行快速建模。
57、6、本发明方法提出的动态非线性自动驾驶仪适用于各种类型的制导飞行器,通过对飞行器动力学数据表格的控制响应反馈,能够动态调整控制增益,控制效果好,鲁棒性强。
- 还没有人留言评论。精彩留言会获得点赞!