一种基于LiDAR点云数据的灌区水利要素信息的提取及系统
本发明属于智慧灌区建设,具体涉及一种基于lidar点云数据的灌区水利要素信息的提取及系统。
背景技术:
1、智慧灌区是灌区现代化发展的主要方向和重要特征。灌区智慧化的实现,需要快速而精准地获取、更新水利要素空间信息,为灌区智慧化提供基础数据支撑,从而保障灌区水利要素信息的现势性。机载lidar技术能快速精准地获取灌区水利要素信息,可为灌区智能化提供技术支撑。
2、lidar技术可快速、全面、精准地获取灌区要素的空间坐标、光谱和激光回三种类型的信息,利用光谱信息生成点云正射影像,为人工智能的应用提供了条件,卷积神经网络的发展让目标识别和图像分割取得了革命性的突破。针对灌区水利要素收集大量的数字影像资料建立目标识别训练库,灌区水利要素类别主要有五类,田块、渠道、沟道、闸门和泵站,分别对应面状、线状和点状三类几何类型,具有较强的平面分布特征。同时也将点云生成的正射影像中的水利要素目标影像参与训练,提高卷积神经网络对水利要素目标的识别能力,完成水利要素对象准确地识别与分割,获取分割后水利要素对象的边界坐标范围。
3、在智慧灌区建设中需要快速精准获取不同水利要素空间分布和内部几何结构信息,通过人工智能技术对水利要素识别和分割仅获得水利要素对象的类别和坐标范围,缺乏水利要素对象的内部结构信息。水利要素对象的内部结构信息包含在点云的空间坐标信息中,直接从灌区全部点云数据中提取水利要素对象内部几何结构信息算法复杂度高,计算量大等困难。
4、目前,灌区智能化建设数据底座的生产方式主要有全站仪、rtk、和无人机摄影测量三种主要的方式,全站仪和rtk数字化测图难以获取全要素的地形图,而摄影测量方法技术复杂、计算量大、解算精度一致性差。机载lidar技术可获得灌区全要素信息且数据精度一致性强,有效弥补了传统测图手段的不足。点云数据信息类别非常丰富,可实现精细三维建模,目前该技术应用的主流方向是城市实景三维建模,在智慧灌区建设方向的应用和研究的报导文献不多,尚缺乏实质性的应用。
技术实现思路
1、为实现当前基于点云数据构建智慧灌区精细数据底座的技术问题,本发明提出一种基于lidar点云数据的灌区水利要素信息的提取方法及系统,可以解决水利要素信息提取过程中的一系列技术问题,通过卷积神经网络进行影像识别,获得水利要素的空间位置,进一步对点云数据进行分割得到水利要素点云数据块,再利用扫描面算法提取水利要素对象的内部结构信息。
2、为实现上述的技术特征,本发明包括如下技术方案:
3、一种基于lidar点云数据的灌区水利要素信息的提取方法,包括如下步骤:
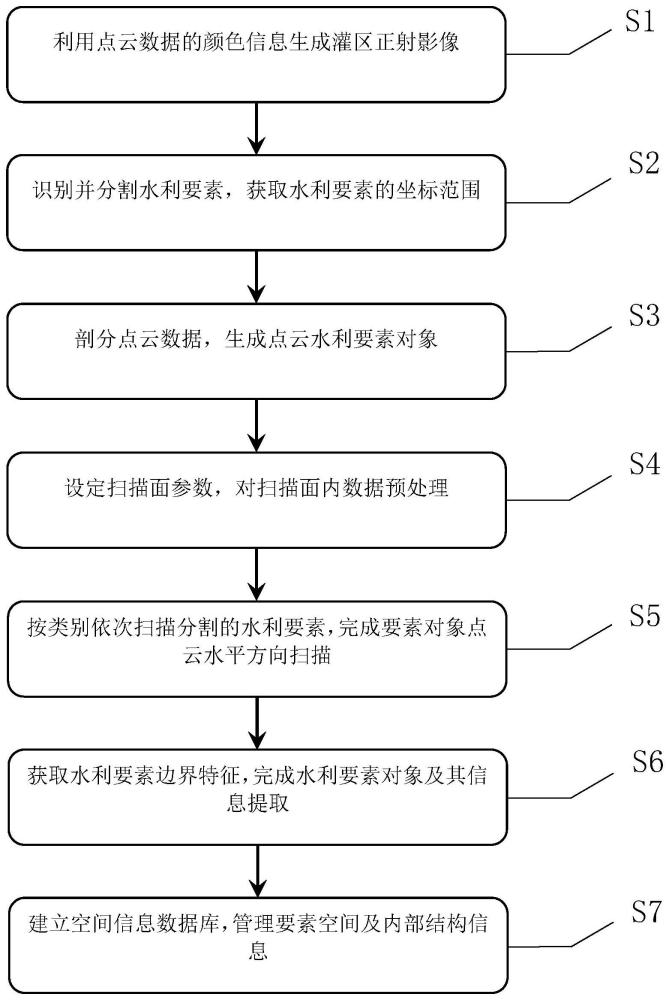
4、步骤s1:基于lidar点云数据生成灌区正射影像,并赋予正射影像空间坐标信息,确定每个像元对应的空间平面坐标;
5、步骤s2:基于正射影像,利用人工智能的方法识别出灌区不同水利要素类别的对象,并确定不同水利要素对象的坐标范围;
6、步骤s3:根据水利要素对象的坐标范围,对点云数据进行分割,建立不同类别对象对应的点云数据块;
7、步骤s4:根据灌区水利要素的几何特征,设定初始扫描面参数,在不同的扫描面中,对扫描得到的点云数据进行预处理操作;
8、步骤s5:依据水利要素类别特征,识别并确定扫描面生长方向,按生长方向完成水利要素点云数据水平方向上的扫描;
9、步骤s6:在扫描的同时依据水利要素几何形态特征和点云数据信息,提取水利要素精细的几何形态数据;
10、步骤s7:根据获取到的点云数据和水利要素几何特征建立属性数据库,统一管理灌区水利要素数据。
11、进一步地,所述步骤s1中利用lidar点云数据丰富的空间点位信息和光谱信息,生成正射影像,设定相应的图像分辨率和大小,计算确定正射影像的覆盖范围,且根据图像分辨率和图像覆盖范围边界计算出任意像元对应的像素坐标和空间坐标。
12、进一步地,步骤s2包括如下子步骤:
13、s21:建立灌区不同类别的水利要素影像训练库,利用人工智能方法对灌区正射影像中分布的不同类别的水利要素对象进行识别和分割,获得水利要素类别信息和要素对象对应的坐标范围;
14、s22:按照灌区水利要素类别建立对应的数据库结构,按类别存储水利要素对象的类别、边界及内部几何形态多种类型的数据。
15、进一步地,所述步骤s3中利用水利要素对象的坐标范围对整体点云数据进行分割获得水利要素对象的点云数据,然后利用扫描线算法,对要素对象点云数据进行特征识别和信息提取。
16、进一步地,所述步骤s4中用扫描面算法沿预设的方向对要素点云数据进行扫描,扫描前设定扫描面的初始参数,设定断面聚合参数,设定聚合到扫描面上的点云数据在扫描面前后的间距,设定断面点云数据滤波参数对断面点云数据进行预处理。
17、进一步地,首先设定扫描面全局初始参数,然后依据点云特征自适应地优化扫描面参数,确定扫描方向和扫描步长开展扫描工作。
18、进一步地,步骤s6具体为:
19、s61:以当前扫描面获得垂直方向上的水利要素对象点云切片数据并进行预处理后生成断面图形,结合水利要素类别信息调用相应的断面内部结构信息识别方法,一种类别的水利要素对应一种模式识别方法,对水利要素断面信息进行分析,获得当前断面的特征点信息,作为水利要素对象的垂向特征;
20、s62:进入下一次扫描,以扫描面获得当前水利要素对象的下一个断面数据,在预处理后,识别出该断面处对应的特征点信息,然后在水平方向内将前后断面中利用相似性匹配算法进行特征点匹配,进行扫描面前进方向上的水利要素内部特征信息的提取和表达;
21、s63:循环以上步骤,完成当前水利要素对象的空间信息提取。
22、进一步地,所述步骤s7中,更换不同类别的水利要素,对点云数据进行水利要素信息的提取,获得水利要素对象的精准的边界和几何形态数据,并存储到数据库中。
23、另一方面,本发明还提供一种基于lidar点云数据的灌区水利要素信息的提取系统,包括:
24、模块一:其用于基于lidar点云数据生成灌区正射影像,并赋予正射影像空间坐标信息,确定每个像元对应的空间平面坐标;
25、模块二:其用于基于正射影像,利用人工智能的方法识别出灌区不同水利要素类别的对象,并确定不同水利要素对象的坐标范围;
26、模块三:其用于根据水利要素对象的坐标范围,对点云数据进行分割,建立不同类别对象对应的点云数据块;
27、模块四:其用于根据灌区水利要素的几何特征,设定初始扫描面参数,在不同的扫描面中,对扫描得到的点云数据进行预处理操作;
28、模块五:其用于依据水利要素类别特征,识别并确定扫描面生长方向,按生长方向完成水利要素点云数据水平方向上的扫描;
29、模块六:其用于在扫描的同时依据水利要素几何形态特征和点云数据信息,提取水利要素精细的几何形态数据;
30、模块七:其用于根据获取到的点云数据和水利要素几何特征建立属性数据库,统一管理灌区水利要素数据;
31、所述基于lidar点云数据的灌区水利要素信息的提取系统用于执行上述的基于lidar点云数据的灌区水利要素信息的提取方法中的步骤。
32、与现有技术相比,本发明具有如下有益效果:
33、(1)本发明推进了机载lidar点云技术在智慧灌区建设领域内的应用,融合了人工智能、计算几何和空间数据库等多项高新技术,利用可覆盖灌区全要素的点云数据进行精准的信息提取,可快速高效完成精确的全要素灌区数据底座构建。
34、(2)本发明是在深刻分析灌区点云数据特点和灌区水利要素特征的基础上,设计完成的智能化水利要素空间和内部结构信息提取算法的。相对于传统的人工数据采集建模和无人机倾斜摄影测量解算而言,基于lidar技术获取点云数据并结合本发明的方法智能化深度提取水利要素信息可为智慧灌区建设提供更精细的空间信息,具有更广泛的应用潜力。
35、(3)本发明所提供的方法,经试验验证,解算结果稳定、解算效率高,体现出了基于lidar点云技术进行灌区水利要素提取的适用性和优越性。
- 还没有人留言评论。精彩留言会获得点赞!