一种雷电弧根滑行运动的仿真建模方法及系统
本发明属于运动建模,具体地说,涉及一种雷电弧根滑行运动的仿真建模方法及系统。
背景技术:
1、避雷线是防止输电导线遭受雷击的重要设备。雷击(包括多重回击)可能会对避雷线的线股造成损伤,轻则降低避雷线的机械强度,重则直接导致避雷线的断裂。目前,国内外对避雷线雷击损伤机理的研究都建立在雷电弧根在避雷线上固定不动的前提假设下。然而在风和电磁力等因素作用下,雷电弧根实际上会沿着避雷线发生滑行运动;由于避雷线具有绞线结构,运动的雷电弧根会比固定不动的雷电弧根造成更多线股的损伤,导致避雷线的机械强度更大幅度的下降,而且由于损伤裸露导致钢锈蚀和寿命降低。因此,有必要对雷电弧根的滑行运动机制开展研究,完善避雷线的雷击损伤机理。
2、为了研究雷电弧根的滑行运动机制,首先需对雷电弧根的滑行位移进行准确的评估。自然雷击属于长间隙的放电,通过实验模拟雷电弧根的滑行运动相当困难。对于电弧形态的模拟,通常采用链式模型来实现。但是目前链式模型的建模对象往往是在实验室中产生的小尺度电弧,例如绝缘子并联间隙的放电电弧,链式模型的建模空间边界通常不超过1m。然而,在自然雷击过程中,雷电弧的长度往往超过百米。在如此大的空间尺度上,如果直接基于原有的链式模型对雷电弧根滑行运动进行分析建模,建模工作量和计算量将是小尺度电弧建模的数百倍以上。
3、此外,雷电弧的运动会受到风的影响,在电弧的滑行运动建模中,以往的研究通常假设各处风速分布均匀一致。然而根据流体力学知识,当风掠过避雷线时,风速分布实际上不是均匀的,这被称之为边界层效应。这种边界层效应导致的风速不均匀特性会对雷电弧根滑行运动的分析产生较大影响。
技术实现思路
1、本发明的第一目的在于克服现有技术的缺点与不足,提供一种雷电弧根滑行运动的仿真建模方法,提高了多重回击作用下雷电弧根的滑行位移的计算精度,且减小了计算开销。
2、本发明的第二目的在于提供一种雷电弧根滑行运动的仿真建模系统。
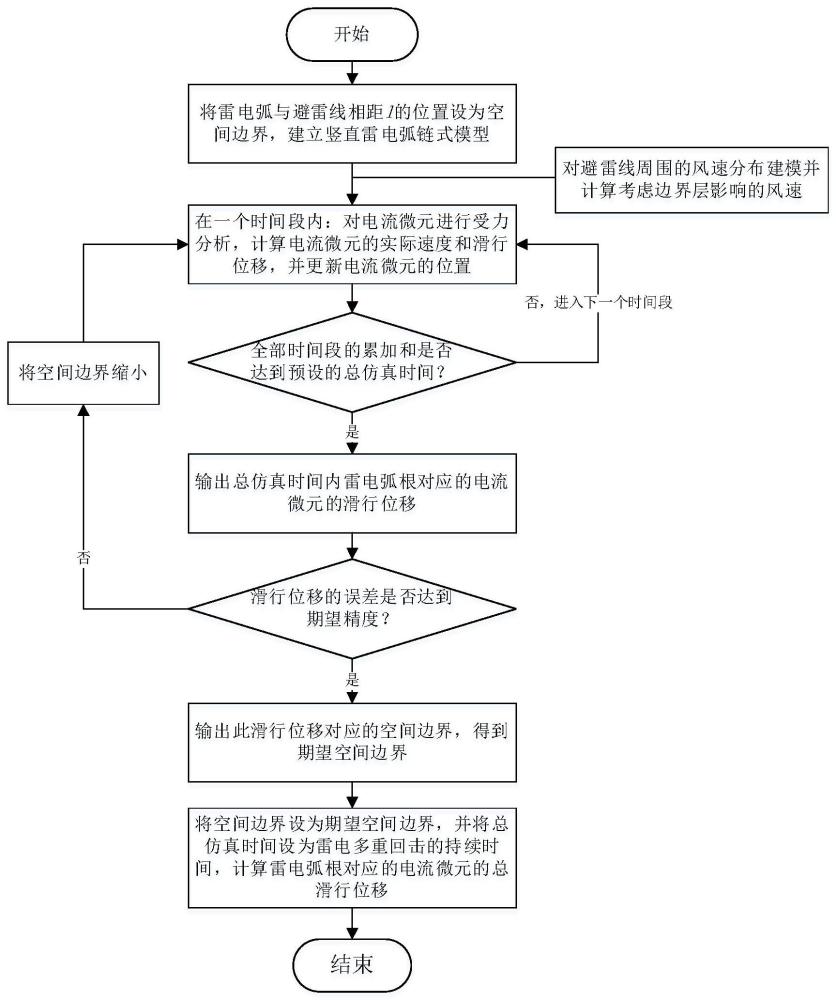
3、本发明的第一目的通过下述技术方案实现:一种雷电弧根滑行运动的仿真建模方法,包括步骤:
4、s1、对避雷线周围的风速分布建模,得到考虑边界层影响的风速,如下:
5、
6、其中,vw为考虑边界层影响的风速,vwind为预设的风速,d为电流微元与避雷线的距离,dwind为避雷线的边界层厚度;
7、s2、以避雷线为x轴,以垂直于地面的轴线为y轴,建立平面直角坐标系,将雷电弧均分为若干个圆柱形电流微元,雷电弧根对应的电流微元的位置为y=0,将雷电弧与避雷线相距l的位置设为空间边界,建立竖直雷电弧链式模型;
8、s3、设定总仿真时间,将总仿真时间平均划分为若干个时间段,在各个时间段依次进行迭代仿真:基于竖直雷电弧链式模型并结合所述考虑边界层影响的风速,对各电流微元进行受力分析,得到电流微元的实际速度和电流微元的滑行位移,并更新电流微元的位置,直至各个时间段的累加和达到总仿真时间,循环结束,汇总在总仿真时间内雷电弧根对应的电流微元的总滑行位移;
9、s4、将步骤s2中的空间边界不断缩小,重复步骤s2至步骤s3,得到各空间边界对应的滑行位移,当滑行位移的误差达到期望精度,得到期望空间边界,所述误差δ的计算公式如下:
10、
11、s′为当空间边界设为期望空间边界时雷电弧根对应的电流微元的滑行位移;s为当空间边界设为初始值时雷电弧根对应的电流微元的滑行位移;
12、s5、将步骤s2中的空间边界设为所述期望空间边界,将步骤s3的总仿真时间设为雷电多重回击的持续时间,重复步骤s2至步骤s3,当时间段的累加和达到雷电多重回击的持续时间,得到多重回击作用下雷电弧根对应的电流微元的总滑行位移,仿真结束。
13、优选的,步骤s3具体包括步骤:
14、s31、设定时间段δt,在时间段内,对电流微元受力分析得到电流微元的受力方程,根据受力方程计算电流微元与空气的相对速度δv:
15、fm+ft+fair=0,
16、fm=bil,
17、ft=ρgπr2l,
18、fair=cdrlρ△v2,
19、
20、其中,fm为电磁力,ft为热浮力,fair为空气阻力,b为电磁感应强度,l为电流微元的长度,ρ为空气密度,g为重力加速度,r为电流微元的半径,cd为空气阻力系数,u0为真空中的磁导率,r为电流微元之间的距离,dl为电流微元的长度微分,i为雷电流;
21、s32、结合所述电流微元与空气的相对速度δv及步骤s1的考虑边界层影响的风速v w,计算电流微元的实际速度v:
22、v=△v+vw(d);
23、s33、各电流微元在时间段δt内做匀速运动,计算在时间段δt内各电流微元的滑行位移δx并更新各电流微元的位置,
24、
25、
26、其中,(xi,yi)为第i个电流微元的坐标,δxi为第i个电流微元在时间段δt内的滑行位移,δxi,x为δxi在x轴上的投影,δxi,y为δxi在y轴上的投影,各符号的上标“t”和“t+1”分别代表t时刻和t+δt时刻;
27、s34、设定总仿真时间t,判断各时间段的累加和是否达到总仿真时间t:
28、若否,则重复步骤s31至步骤s33;
29、若是,则汇总在总仿真时间内雷电弧根对应的电流微元的总滑行位移:
30、
31、其中,xroot为雷电弧根对应的电流微元的总滑行位移,δxtroot为雷电弧根对应的电流微元从t时刻到t+δt时刻过程中的滑行位移,δxtroot,x为δxroot在x轴上的投影。
32、优选的,步骤s4中,所述将步骤s2中的空间边界不断缩小具体包括用竖直雷电流等效距离避雷线最远的雷电弧柱,使得空间边界缩小。
33、优选的,步骤s4中,所述期望精度小于或者等于1%。
34、优选的,步骤s31中,所述雷电流i包括脉冲分量电流ip和持续分量电流icc,一个脉冲分量电流ipc为:
35、
36、其中,ia为雷电流的幅值、tα为脉冲分量的波尾时间、tβ为脉冲分量电流的波头时间;一个持续分量电流icc保持恒定,取值范围为:0a≤icc≤100a;
37、当雷电流处于脉冲分量阶段时,所述时间段δt的取值范围为:1us≤δt≤5us,当雷电流处于持续分量阶段时,所述时间段δt取值范围为:1us≤δt≤5ms。
38、本发明的第二目的通过下述技术方案实现:一种雷电弧根滑行运动的仿真建模系统,包括:
39、风速建模模块,用于对避雷线周围的风速分布建模,得到考虑边界层影响的风速,如下:
40、
41、其中,v w为考虑边界层影响的风速,v wind为预设的风速,d为电流微元与避雷线的距离,dwind为避雷线的边界层厚度;
42、雷电弧链式模型建立模块,用于以避雷线为x轴,以垂直于地面的轴线为y轴,建立平面直角坐标系,将雷电弧均分为若干个圆柱形电流微元,雷电弧根对应的电流微元的位置为y=0,将雷电弧与避雷线相距l的位置设为空间边界,建立竖直雷电弧链式模型;
43、第一位移求解模块,用于第一位移求解模块,用于设定总仿真时间,将总仿真时间平均划分为若干个时间段,在各个时间段依次进行迭代仿真:基于竖直雷电弧链式模型并结合所述考虑边界层影响的风速,对各电流微元进行受力分析,得到电流微元的实际速度和电流微元的滑行位移,并更新电流微元的位置,直至各个时间段的累加和达到总仿真时间,循环结束,汇总在总仿真时间内雷电弧根对应的电流微元的总滑行位移;
44、空间边界压缩模块,用于将雷电弧链式模型建立模块中的空间边界不断缩小,重复运行雷电弧链式模型建立模块至第一位移求解模块,得到各空间边界对应的滑行位移,当滑行位移的误差达到期望精度,得到期望空间边界,所述误差δ的计算公式如下:
45、
46、s′为当空间边界设为期望空间边界时雷电弧根对应的电流微元的滑行位移;s为当空间边界设为初始值时雷电弧根对应的电流微元的滑行位移;
47、第二位移求解模块,用于将雷电弧链式模型建立模块中的空间边界设为所述期望空间边界,将第一位移求解的总仿真时间设为雷电多重回击的持续时间,当时间段的累加和达到雷电多重回击的持续时间,得到多重回击作用下雷电弧根对应的电流微元的总滑行位移,仿真结束。
48、优选的,所述第一位移求解模块具体包括:
49、受力分析模块,用于设定时间段δt,在时间段内,对电流微元受力分析得到电流微元的受力方程,根据受力方程计算电流微元与空气的相对速度δv:
50、fm+ft+fair=0,
51、fm=bil,
52、ft=ρgπr2l,
53、fair=cdrlρ△v2,
54、
55、其中,fm为电磁力,ft为热浮力,fair为空气阻力,b为电磁感应强度,l为电流微元的长度,ρ为空气密度,g为重力加速度,r为电流微元的半径,cd为空气阻力系数,u0为真空中的磁导率,r为电流微元之间的距离,dl为电流微元的长度微分,i为雷电流;
56、速度计算模块,用于结合所述电流微元与空气的相对速度δv及所述考虑边界层影响的风速vw,计算电流微元的实际速度v:
57、v=△v+vw(d);
58、位移计算模块,用于计算在时间段δt内各电流微元的滑行位移δx并更新各电流微元的位置,各电流微元在时间段δt内做匀速运动,
59、
60、
61、其中,(xi,yi)为第i个电流微元的坐标,δxi为第i个电流微元在时间段δt内的滑行位移,δxi,x为δxi在x轴上的投影,δxi,y为δxi在y轴上的投影,各符号的上标“t”和“t+1”分别代表t时刻和t+δt时刻;
62、循环判断模块,用于设定总仿真时间t,判断各时间段的累加和是否达到总仿真时间t:
63、若否,则重复运行受力分析模块、速度计算模块至位移计算模块;
64、若是,则汇总在总仿真时间内雷电弧根对应的电流微元的总滑行位移:
65、
66、其中,xroot为雷电弧根对应的电流微元的总滑行位移,δxtroot为雷电弧根对应的电流微元从t时刻到t+δt时刻过程中的滑行位移,δxtroot,x为δxroot在x轴上的投影。
67、优选的,空间边界压缩模块中,所述将雷电弧链式模型建立模块中的空间边界不断缩小,具体包括用竖直雷电流等效距离避雷线最远的雷电弧柱,使得空间边界缩小。
68、优选的,空间边界压缩模块中,所述期望精度小于或者等于1%。
69、优选的,受力分析模块中,所述雷电流i包括脉冲分量电流ip和持续分量电流icc,一个脉冲分量电流ipc为:
70、
71、其中,ia为雷电流的幅值、tα为脉冲分量的波尾时间、tβ为脉冲分量电流的波头时间;一个持续分量电流icc保持恒定,取值范围为:0a≤icc≤100a;
72、当雷电流处于脉冲分量阶段时,所述时间段δt的取值范围为:1us≤δt≤5us,当雷电流处于持续分量阶段时,所述时间段δt取值范围为:1us≤δt≤5ms。
73、本发明相对于现有技术具有如下的优点及效果:
74、(1)本发明的一种雷电弧根滑行运动的仿真建模方法,通过对避雷线周围的风速建模得到考虑边界层影响的风速,基于竖直雷电弧链式模型并结此考虑边界层影响的风速,得到更贴合实际雷击过程的电流微元的实际速度,并计算雷电弧根的滑行位移,提高了计算的精准性;同时,通过不断缩小竖直雷电弧链式模型的空间边界、并计算不同空间边界下对应的滑行位移,筛选出滑行位移的误差达到期望精度时的期望空间边界,结合此期望空间边界及上述滑行位移计算方法,计算得到多重回击作用下的雷电弧根的滑行位移,实现了在保证计算精度的前提下尽可能地缩小了建模的空间边界,减小了模型的计算开销。
75、(2)本发明中用竖直雷电流等效距离避雷线最远的雷电弧柱,使得空间边界缩小,能够对达到百米的雷电弧进行研究,为雷电弧根的滑行运动机制研究提供依据,对于避雷线的损伤评估和设备选型具有重要意义。
76、(3)本发明针对雷电流处于不同的阶段,对应的时间段设为不同的数值范围,提高了对各电流阶段的滑行位移的计算精度和计算效率。
- 还没有人留言评论。精彩留言会获得点赞!