彩色图像获取方法、系统、设备、介质及口内扫描装置与流程
本发明涉及图像处理,尤其涉及一种彩色图像获取方法、系统、电子设备、介质及口内扫描装置。
背景技术:
1、口内扫描仪采用的技术方法主要有结构光三维扫描法和共聚焦三维扫描法。共聚焦法因其需要复杂的光学系统设计以及超高速相机实现深度方向的层析扫描,技术门槛相对较高,产品开发难度大周期长。而结构光法结构简单,技术原理发展成熟,成为了口内扫描的主流技术方案。
2、但纵观现有的口内扫描技术,纹理数据获取一般采用多帧单色光或白光照明补偿、灰度相机或彩色相机采集的方式,由于光学设计为了控制产品尺寸以及投影照明的光利用率,难以保证照明亮度的均匀性,同时精密的结构设计和极高的公差要求,使得生产装配出来的设备在投影图案的亮度均匀性上难以达到设计标准,导致通过口内扫描得到的投影图案均匀性较差。
技术实现思路
1、本发明提供一种彩色图像获取方法、系统、电子设备、计算机可读存储介质及口内扫描装置,其主要目的在于解决进行口内扫描时获取的彩色图像点云纹理数据精确度较低的问题。
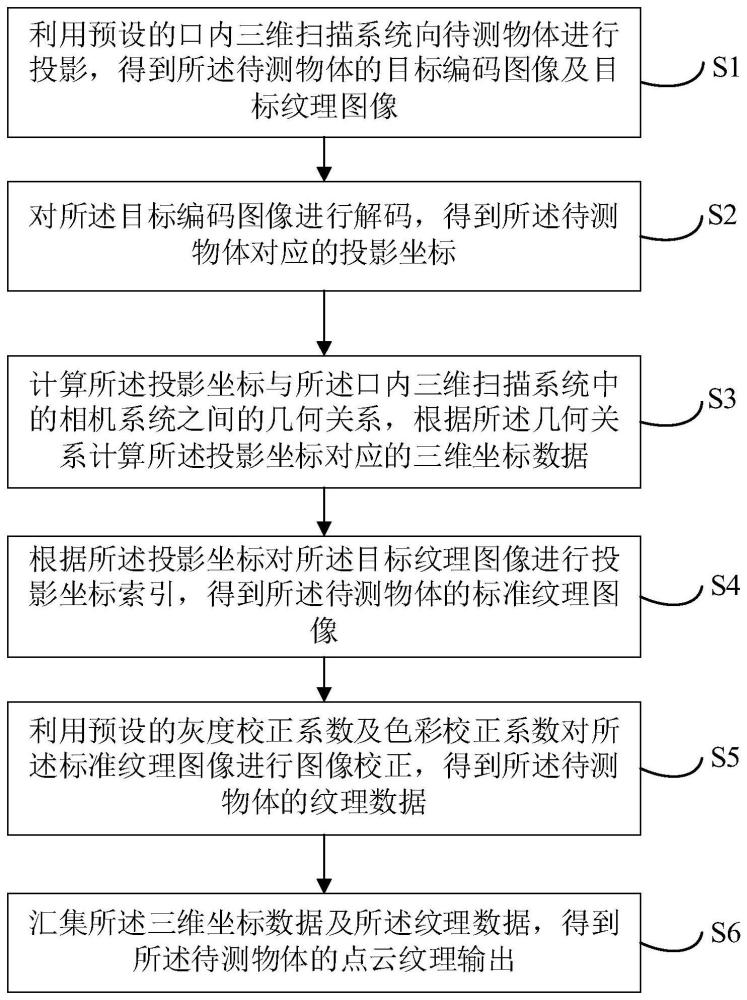
2、为实现上述目的,本发明提供的一种彩色图像获取方法,包括:
3、利用预设的口内三维扫描装置向待测物体进行投影,得到所述待测物体的目标编码图像及目标纹理图像;
4、对所述目标编码图像进行解码,得到所述待测物体对应的投影坐标;
5、计算所述投影坐标与所述口内三维扫描装置中的相机系统之间的几何关系,根据所述几何关系计算所述投影坐标对应的三维坐标数据;
6、根据所述投影坐标对所述目标纹理图像进行投影坐标索引,得到所述待测物体的标准纹理图像;
7、利用预设的灰度校正系数及色彩校正系数对所述标准纹理图像进行图像校正,得到所述待测物体的纹理数据;
8、汇集所述三维坐标数据及所述纹理数据,得到所述待测物体的点云纹理输出。
9、可选地,所述对所述目标编码图像进行解码,得到所述待测物体对应的投影坐标,包括:
10、对所述目标编码图像进行图像去噪及图像增强,得到标准图像;
11、提取所述标准图像的图像条纹,对所述图像条纹进行二值化,得到所述目标编码图像的二值条纹;
12、选取所述二值条纹中最小间隔二值条纹对应的二值条纹序列,对所述二值条纹序列进行二进制组合,得到所述待测物体对应的投影坐标。
13、可选地,所述计算所述投影坐标与所述口内三维扫描装置中的相机系统之间的几何关系,包括:
14、初始化世界坐标零平面,计算所述相机系统与所述世界坐标零平面之间的坐标距离;
15、获取所述相机系统的相机坐标系以及所述投影坐标的投影坐标系,计算所述相机坐标系的光轴与所述投影坐标系的中轴之间的夹角以及所述相机坐标系与所述投影坐标系之间的坐标系距离;
16、将所述坐标距离、所述夹角、所述坐标系距离、所述相机系统的焦距以及所述口内三维扫描装置的投影焦距作为所述投影坐标与所述口内三维扫描装置中的相机系统之间的几何关系。
17、可选地,所述根据所述几何关系计算所述投影坐标对应的三维坐标数据,包括:
18、利用如下公式计算所述投影坐标对应的三维坐标数据:
19、
20、其中,所述(x,y,z)为所述投影坐标对应的三维坐标数据,所述z0为所述几何关系中的坐标距离,fc为所述几何关系中相机系统的焦距,(u,v)为所述投影坐标在相机系统的成像平面的坐标,l为所述几何关系中的坐标系距离,θ为所述几何关系中的夹角,fp为所述几何关系中的投影焦距,w为所述几何关系中的投影坐标的横坐标。
21、可选地,所述利用预设的灰度校正系数及色彩校正系数对所述标准纹理图像进行图像校正之前,所述方法还包括:
22、从预设的多个标准灰度色卡中获取多个标准色块,从所述标准色块中采集标准灰度值;
23、利用所述标准灰度值及所述标准纹理图像的灰度值建立校正拟合关系式;
24、对所述校正拟合关系式进行最小二乘优化,得到所述灰度校正系数及所述色彩校正系数。
25、可选地,所述对所述校正拟合关系式进行最小二乘优化,得到所述灰度校正系数及所述色彩校正系数,包括:
26、对所述校正拟合关系式进行优化求解,得到所述灰度校正系数,利用所述灰度校正系数校正预设的标准色卡,得到标准校正色卡;
27、所述校正拟合关系式如下式所示:
28、
29、其中,ir1表示在r通道的标准灰度值,ir0表示所述标准纹理图像在r通道的灰度值,i1是校正拟合关系式中的方程幂次,表示在像素点(l,q)处的灰度校正系数;
30、获取所述标准校正色卡的标准校正色块,计算所述标准校正色块的均值矩阵及标准矩阵;
31、利用所述校正拟合关系式对所述均值矩阵及所述标准矩阵进行拟合,得到色彩矩阵方程,对所述色彩矩阵方程进行求解,得到初始色彩校正系数;
32、所述色彩矩阵方程表示为:
33、
34、其中,是所述标准矩阵,i,j,k分别为r、g、b三通道在校正拟合关系式中的方程幂次,a1i,j,k、a2i,j,k、a3i,j,k分别是r、g、b三通道的初始色彩校正系数,r1i、g1j、b1k分别是均值矩阵的在r、g、b三通道的通道值。
35、利用所述初始色彩校正系数对所述标准校正色块的测量值进行校正,得到所述标准校正色块的校正值,计算所述校正值与所述标准校正色块对应的标准值之间的误差和;
36、利用下式计算所述校正值与所述标准校正色块对应的标准值之间的误差和:
37、
38、其中,n是第n个标准校正色块,m是所述标准校正色块的总数,rn、gn、bn分别是第n个标准校正色块对应的r、g、b通道标准值,r1n、g1n、b1n分别是第n个标准校正色块对应的的r、g、b通道校正值,ergb是所述r、g、b通道标准值与所述r、g、b通道校正值之间的误差和。
39、选取所述误差值最小的初始色彩校正系数作为所述色彩校正系数。
40、为了解决上述问题,本发明还提供一种彩色图像获取系统,其特征在于,所述系统包括:
41、目标图像获取模块,用于利用预设的口内三维扫描装置向待测物体进行投影,得到所述待测物体的目标编码图像及目标纹理图像;
42、编码图像解码模块,用于对所述目标编码图像进行解码,得到所述待测物体对应的投影坐标;
43、三维坐标数据计算模块,用于计算所述投影坐标与所述口内三维扫描装置中的相机系统之间的几何关系,根据所述几何关系计算所述投影坐标对应的三维坐标数据;
44、投影坐标索引模块,用于根据所述投影坐标对所述目标纹理图像进行投影坐标索引,得到所述待测物体的标准纹理图像;
45、图像校正模块,用于利用预设的灰度校正系数及色彩校正系数对所述标准纹理图像进行图像校正,得到所述待测物体的纹理数据;
46、点云纹理输出模块,用于汇集所述三维坐标数据及所述纹理数据,得到所述待测物体的点云纹理输出。
47、为了解决上述问题,本发明还提供一种电子设备,所述电子设备包括:
48、至少一个处理器;以及,
49、与所述至少一个处理器通信连接的存储器;其中,
50、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述所述的彩色图像获取方法。
51、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个计算机程序,所述至少一个计算机程序被电子设备中的处理器执行以实现上述所述的彩色图像获取方法。
52、为了解决上述问题,本发明还提出一种口内扫描装置,应用于上述彩色图像获取方法,其特征在于,所述口内扫描装置包括:投影模块、图像采集模块、数据电路控制模块以及上位机,其中,
53、所述投影模块包括照明系统及光学结构,用于向待测物体投影编码图像及照明图像;
54、所述图像采集模块包括光学传感器及光学结构,用于采集待测物体以及待测物体所在场景反射的投影编码图像信息及照明图像信息;
55、所述电路控制模块包括存储及控制电路、数据处理模块、数据传输模块,其中,所述控制电路用于控制所述投影模块与所述图像采集模块的工作开始和停止时间,实现同步采集投影,所述存储用于采集图像信息的缓存、所述数据处理模块用于对图像信息进行基本处理及计算三维坐标数据,所述数据传输模块用于按照设定的数据传输协议向所述上位机传输图像信息数据;
56、所述上位机,用于对所述图像采集模块采集的图像信息进行预处理、解码、校正及图像信息数据的重建。
57、本发明实施例通过利用预设的口内扫描装置向待测物体投影编码图像能够对待测物体进行标记,并对编码图像进行解码,能够获取待测物体上各个点的投影坐标,从而得到准确的投影坐标对应的三维坐标数据;再通过对目标纹理图像进行坐标索引,能够消除投影产生的坐标偏差;得到更准确地标准纹理图像;再对标准纹理图像进行灰度校正以及颜色校正,能够得到最终的近似无偏差的纹理数据,从而汇集三维坐标数据集及纹理数据进行待测物体的点云纹理输出,得到更准确的待测物体的彩色图像点云纹理数据。因此本发明提出的彩色图像获取方法、系统、电子设备、计算机可读存储介质及口内扫描装置,可以解决进行口内扫描时获取的彩色图像点云纹理数据精确度较低的问题。
- 还没有人留言评论。精彩留言会获得点赞!