基于PSO-MCMC法的车辆行驶时间序列模拟方法及系统与流程
本发明主要涉及新能源汽车,具体涉及一种基于pso-mcmc法的车辆行驶时间序列模拟方法及系统。
背景技术:
1、目前,新能源汽车产业得到了迅速发展,越来越多的汽车制造公司倾向于细分市场、细分场景的定制化产品开发,这驱动企业需要收集大量的用户实际行驶时间序列数据来分析用户在不同使用场景的典型工况,来为汽车产品开发过程中的性能匹配、能耗优化及可靠性验证提供精准的工况输入。目前车辆行驶数据获取方式主要为车队的大规模数据采集,然而受到测试时间、成本及资源等因素的影响,往往只能对全寿命周期内的小部分行驶时间序列进行测试。如何根据小样本的实测数据预测出车辆全寿命周期的行驶时间序列是当前亟需解决的关键技术问题之一。
2、近年来,国内学者对时间序列模拟方面进行了一系列研究,现有的模拟预测方法都取得了一定的成果。相关研究如采用mcmc方法进行风光发电功率时间序列模拟(罗钢,石东源,陈金富,等.风光发电功率时间序列模拟的mcmc方法.电网技术,2014,38(2):321-327);通过持续与波动蒙特卡罗(persistence and variation-monte carlo,pv-mc)法,考虑风电功率状态的持续和波动特性,来进行风电功率序列建模(于鹏,黎静华,文劲宇,等.含风电功率时域特性的风电功率序列建模方法.中国电机工程学报,2014,34(22):3715-3723);基于车辆行驶大样本数据库和马尔科夫链进行车辆行驶工况构建(曹骞,李君,刘宇,等. 基于大数据和马尔科夫链的行驶工况构建.东北大学学报(自然科学版),2019,40(1):77-81)。
3、从目前的研究进展来看,对于时间序列模拟方法的研究大多集中在电力行业的电功率模拟,针对汽车行业车辆行驶工况模拟的研究应用极少;其次,主要以单变量的时间序列模拟研究较多,在多变量特别是多个因素耦合影响的多变量时间序列模拟研究较少。车辆的行驶时间序列不仅包含车速信息,同时也包含道路坡度信息,且二者具有一定的关联关系。考虑车辆行驶数据测试成本、测试周期等制约因素,现阶段迫切需要开发一种基于实际小样本数据测试与用户虚拟模拟预测相融合的方法,来降低企业对车辆运行工况数据的测试成本、节约测试资源和缩短测试周期。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种能够降低企业对车辆运行工况数据的测试成本、节约测试资源和缩短测试周期的基于pso-mcmc法的车辆行驶时间序列模拟方法及系统。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种基于pso-mcmc法的车辆行驶时间序列模拟方法,包括步骤:
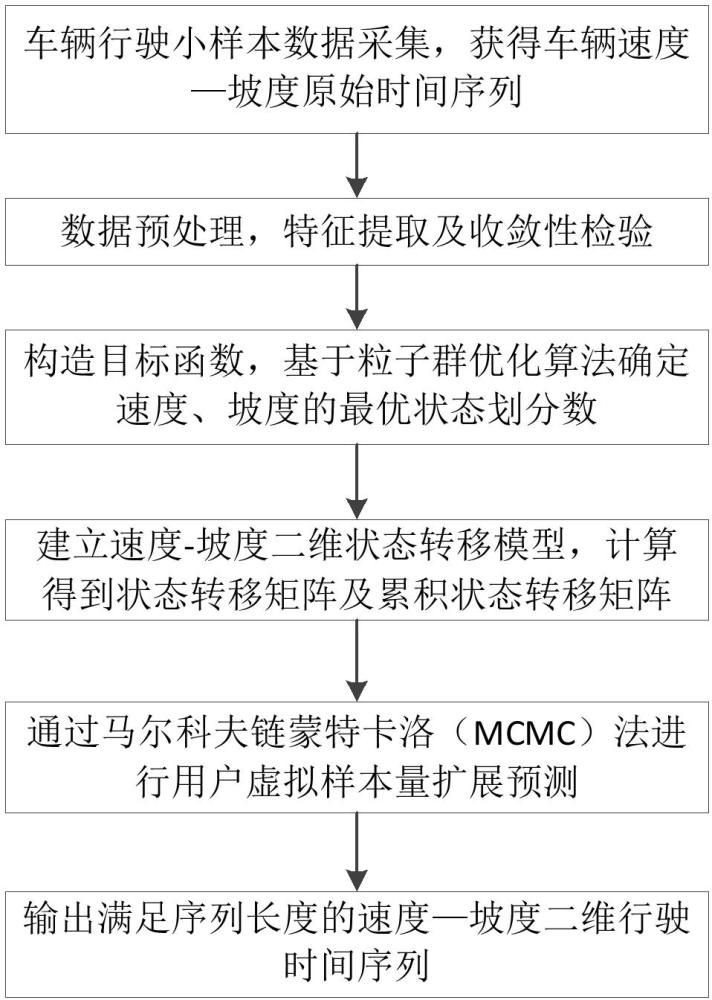
4、s1、获取车辆行驶小样本数据,得到原始车辆速度-坡度时间序列信息;
5、s2、依次对原始车辆速度-坡度时间序列信息进行预处理、特征参数提取及收敛性检验,得到满足要求的样本量;
6、s3、根据样本数据构造目标函数,再基于粒子群优化算法求解目标函数最小值,得到速度、坡度的最优划分状态数;
7、s4、根据速度、坡度的最优划分状态数,分别建立速度和坡度对应的二维状态转移模型,计算得到状态转移矩阵及累积状态转移矩阵;
8、s5、根据状态转移矩阵及累积状态转移矩阵,通过马尔科夫链蒙特卡洛法进行用户虚拟样本量扩展预测,直至输出满足序列长度的速度-坡度二维行驶时间序列。
9、优选地,步骤s2的具体过程为:
10、s21、对车辆速度-坡度原始时间序列信息短行程切割后进行同步预处理,包括数据清洗、离异点剔除和断点修复,再根据设定限值对时间序列的异常数据与异常片段进一步剔除;
11、s22、提取并计算预处理后的速度-坡度时间序列的特征参数;
12、s23、根据用户累计里程进行数据分段,计算特征参数并进行无量纲化;计算相对误差,检验其收敛情况,若不收敛,则增加小样本采集的时间序列长度,直至样本量满足要求。
13、优选地,在步骤s22中,与速度相关特征参数包括平均车速、速度标准差、加速段平均加速度、减速段平均减速度、加速度标准差及相对正加速度;与坡度相关的特征参数包括平均坡度、坡度标准差、平均上坡坡度、平均上坡正速率、平均上坡负速率、平均下坡坡度、平均下坡正速率和平均下坡负速率。
14、优选地,步骤s3的具体过程为:
15、s31、采用核密度估计法分别计算样本数据中速度、坡度时间序列的概率密度函数pdf曲线;设定滞后步长,计算速度和坡度的自相关函数acf曲线,并构造目标函数;
16、s32、根据粒子群优化算法求解目标函数最小值,得到速度、坡度的最优划分状态数n、m。
17、优选地,在步骤s31中,目标函数:
18、其中,为速度或坡度的pdf曲线残差平方和;为速度或坡度的acf曲线残差平方和;=1或2,当取1时为速度,取2时为坡度;
19、残差平方和为:
20、其中,为函数的自变量,acf曲线计算中为滞后步长,pdf曲线计算中为速度或坡度随机变量;为自变量的可能取值的样本个数;为生成的虚拟序列处对应的函数值;为原测试时间序列处对应的函数值;值越小即表示2条函数曲线越接近。
21、优选地,步骤s4的具体过程为:
22、s41、根据速度最优划分状态数n和坡度最优划分状态数m,将时间序列转换成离散状态点;
23、s42、基于离散状态点建立速度状态转移概率模型,计算速度累计概率转移矩阵;
24、s43、基于离散状态点建立考虑速度的坡度状态转移概率模型,计算速度累计概率转移矩阵。
25、优选地,在步骤s42中,
26、
27、其中,表示时刻状态转移到时刻状态的概率;表示概率函数;和分别表示和时刻的状态;表示顺序相继过程的转移次数;
28、
29、其中,。
30、优选地,在步骤s43中,
31、
32、其中,,为车速离散状态数;为坡度离散状态数;表示车速为状态下,坡度在时刻状态转移到时刻状态的概率;坡度在某车速状态下的累积状态转移矩阵参照同理求得。
33、优选地,步骤s5的具体过程为:
34、s51、初始化车速和坡度的状态、,选取模拟序列的初始车速和初始坡度均为0;
35、s52、由当前状态抽样下一时刻状态,生成虚拟状态序列;
36、s53、将生成的虚拟状态序列进行状态解码,生成虚拟速度-坡度时间序列。
37、优选地,步骤s52具体为:由蒙特卡洛法产生均匀分布随机数,,将与速度累计概率转移矩阵的第行进行比较;若,则选取为车速下一时刻的状态;将与矩阵的第行进行比较;若,则选取为坡度下一时刻的状态;通过和生成虚拟状态序列。
38、优选地,步骤s53中,状态解码计算公式如下:
39、
40、其中,为该时刻的模拟车速;与分别为状态所覆盖的车速区间的上限和下限;为该时刻的模拟坡度;与分别为状态所覆盖的坡度区间的上限和下限。
41、本发明还公开了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器运行时执行如上所述方法的步骤。
42、本发明还公开了一种基于pso-mcmc法的车辆行驶时间序列模拟系统,包括相互连接的存储器和处理器,所述存储器上存储有计算机程序,所述计算机程序在被处理器运行时执行如上所述方法的步骤。
43、与现有技术相比,本发明的优点在于:
44、本发明以实际测试数据为基础,来确定考虑多个变量之间关联的速度-坡度的二维状态转移模型,通过粒子群优化算法来进行最优状态数的选取,基于马尔科夫链蒙特卡洛方法进行用户虚拟多维耦合样本量的扩展,既保留了测试样本实际的时序特性,在虚拟样本幅值上也有一定程度的外推估计作用,能够有效预测小样本用户行驶数据采集中难以覆盖小概率的极端工况。
45、本发明可以根据需求模拟产生任意长度的时间序列,有效解决车辆工况研究过程中样本不足的问题,能够降低企业对车辆运行工况数据的测试成本、节约测试资源和缩短测试周期;并且为汽车产品在开发过程中典型使用场景识别、系统性能或可靠性验证工况开发提供可靠的数据支撑。
- 还没有人留言评论。精彩留言会获得点赞!