建模网格确定方法、装置、电子设备及存储介质与流程
本技术涉及建模仿真,尤其涉及一种建模网格确定方法、装置、电子设备及存储介质。
背景技术:
1、当前,对终端设备的设备模型建模完成后,可以对设备模型应用cae(computeraided engineering,计算机辅助工程)技术,cae技术可以用于预知终端设备的风险及对已有风险进行分析,以解决终端设备的质量问题。而应用cae技术之前,需要手动提取设备模型中的各元件的建模网格,如芯片的建模网格、主板的建模网格等。而设备模型中的各元件的建模网格的工作通常由人工完成,效率较低。
技术实现思路
1、本技术实施例公开了一种建模网格确定方法、装置、电子设备及存储介质,能够提高提取建模网格的效率。
2、本技术实施例公开了一种建模网格确定方法,方法包括:
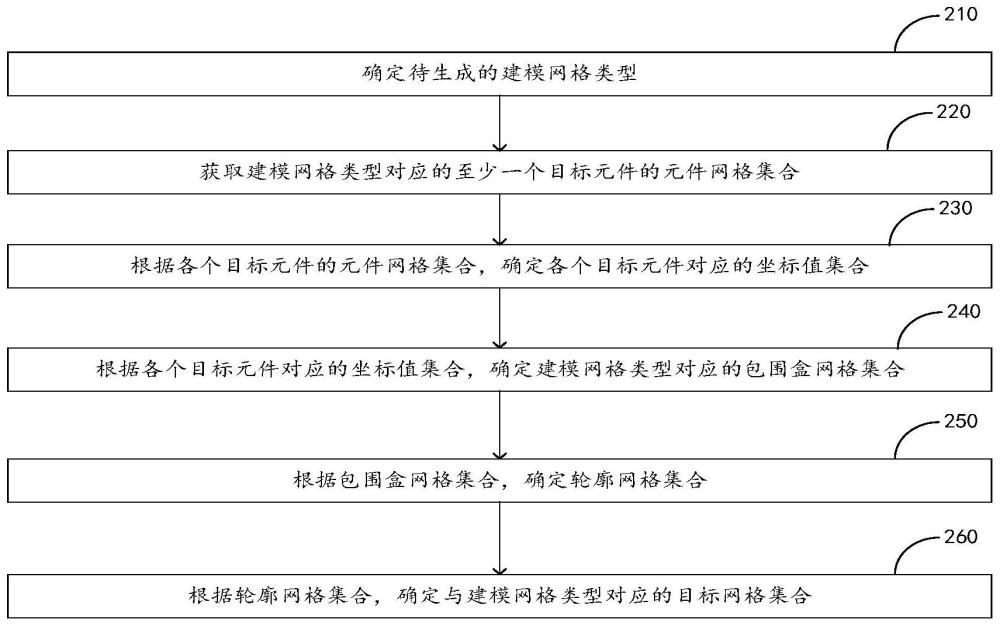
3、确定待生成的建模网格类型;
4、获取所述建模网格类型对应的至少一个目标元件的元件网格集合;
5、根据各个所述目标元件的元件网格集合,确定各个所述目标元件对应的坐标值集合;所述坐标值集合包括目标元件在三维坐标系包括的三个坐标轴上分别对应的坐标最大值以及坐标最小值;
6、根据各个所述目标元件对应的坐标值集合,确定所述建模网格类型对应的包围盒网格集合;
7、根据所述包围盒网格集合,确定轮廓网格集合;
8、根据所述轮廓网格集合,确定与所述建模网格类型对应的目标网格集合。
9、在一个实施例中,所述至少一个目标元件包括芯片元件;所述三维坐标系包括x轴、y轴及z轴,所述x轴、y轴分别与所述z轴垂直,所述z轴的方向用于指示所述芯片元件的厚度方向;
10、所述根据各个所述目标元件对应的坐标值集合,确定所述建模网格类型对应的包围盒网格集合,包括:
11、根据各个所述目标元件对应的坐标值集合,确定第一坐标值范围及第二坐标值范围;在所述建模网格类型为芯片本体模型网格的情况下,所述第一坐标值范围与第二坐标值范围分别对应不同z轴坐标值范围;和/或,在所述建模网格类型为芯片四角模型网格的情况下,所述第一坐标值范围与所述第二坐标值范围分别对应不同的x轴坐标值范围及y轴坐标值范围;
12、根据所述第一坐标值范围生成第一包围盒网格集合;
13、根据所述第二坐标值范围生成第二包围盒网格集合;
14、所述根据所述包围盒网格集合,确定轮廓网格集合,包括:
15、根据所述第一包围盒网格集合及所述第二包围盒网格集合,确定轮廓网格集合。
16、在一个实施例中,在所述建模网格类型为芯片本体模型网格的情况下,所述根据各个所述目标元件对应的坐标值集合,确定第一坐标值范围及第二坐标值范围,包括:
17、根据所述芯片元件对应的z轴坐标最大值确定第一z轴坐标值范围,并根据所述芯片元件对应的x轴坐标最大值、x轴坐标最小值、y轴坐标最大值及y轴坐标最小值及所述第一z轴坐标值范围确定第一坐标值范围;
18、根据所述芯片元件对应的z轴坐标最小值确定第二z轴坐标值范围,并根据所述芯片元件对应的x轴坐标最大值、x轴坐标最小值、y轴坐标最大值及y轴坐标最小值及所述第二z轴坐标值范围确定第二坐标值范围。
19、在一个实施例中,所述芯片元件至少包括第一表面、第二表面,所述第一表面、所述第二表面垂直于所述z轴,且所述第一表面与所述第二表面平行;在所述建模网格类型为芯片本体模型网格的情况下,所述根据所述第一包围盒网格集合及所述第二包围盒网格集合,确定轮廓网格集合,包括:
20、根据所述第一包围盒网格集合,确定所述第一表面的第一轮廓线;
21、根据所述第二包围盒网格集合,确定所述第二表面的第二轮廓线;
22、根据所述第一轮廓线确定所述第一包围盒网格集合中,与所述第一轮廓线相邻的网格,得到第一轮廓网格;
23、根据所述第二轮廓线所述第二包围盒网格集合中,与所述第二轮廓线接触的网格,得到第二轮廓网格;
24、根据所述第一轮廓网格以及所述第二轮廓网格,生成轮廓网格集合。
25、在一个实施例中,在所述建模网格类型为芯片四角模型网格的情况下,所述至少一个目标元件还包括所述芯片元件对应的主板元件,所述根据各个所述目标元件对应的坐标值集合,确定第一坐标值范围及第二坐标值范围,包括:
26、基于初始x轴坐标值范围,生成第一x轴坐标值范围以及第二x轴坐标值范围,所述初始x轴坐标值范围是根据芯片元件对应的x轴坐标最大值、x轴坐标最小值确定的,所述第一x轴坐标值范围包含所述初始x轴坐标值范围,所述初始x轴坐标值范围包含所述第二x轴坐标值范围;
27、基于初始y轴坐标值范围,生成第一y轴坐标值范围以及第二y轴坐标值范围,所述初始y轴坐标值范围是根据芯片元件对应的y轴坐标最大值、y轴坐标最小值确定的,所述第一y轴坐标值范围包含所述初始y轴坐标值范围,所述初始y轴坐标值范围包含所述第二y轴坐标值范围;
28、根据目标z轴坐标值,确定第三z轴坐标值范围;所述目标z轴坐标值是所述主板元件对应的z轴坐标最大值以及z轴坐标最小值中确定的一个值;
29、根据第一x轴坐标值范围、第一y轴坐标值范围以及所述第三z轴坐标值范围,确定第一坐标值范围;
30、根据第二x轴坐标值范围、第二y轴坐标值范围以及所述第三z轴坐标值范围,确定第二坐标值范围。
31、在一个实施例中,所述根据所述第一包围盒网格集合及所述第二包围盒网格集合,确定轮廓网格集合,包括:
32、将所述第一包围盒网格集合减去所述第二包围盒网格集合,得到轮廓网格集合。
33、在一个实施例中,所述根据所述轮廓网格集合,确定与所述建模网格类型对应的目标网格集合,包括:
34、获取所述轮廓网格集合中的每个网格对应的网格x轴坐标最大值、网格x轴坐标最小值、网格y轴坐标最大值以及网格y轴坐标最小值;
35、根据所述每个网格对应的网格x轴坐标最大值、网格x轴坐标最小值、网格y轴坐标最大值以及网格y轴坐标最小值,确定每个网格是否为所述芯片元件的四角位置对应的网格;
36、根据确定的所述芯片元件的四角位置对应的网格,确定所述芯片四角模型网格对应的目标网格集合。
37、本技术实施例公开了一种建模网格确定装置,所述装置包括:
38、类型确定模块,用于确定待生成的建模网格类型;
39、集合获取模块,用于获取所述建模网格类型对应的至少一个目标元件的元件网格集合;
40、坐标确定模块,用于根据各个所述目标元件的元件网格集合,确定各个所述目标元件对应的坐标值集合;所述坐标值集合包括目标元件在三维坐标系包括的三个坐标轴上分别对应的坐标最大值以及坐标最小值;
41、集合确定模块,用于根据各个所述目标元件对应的坐标值集合,确定所述建模网格类型对应的包围盒网格集合;
42、轮廓确定模块,用于根据所述包围盒网格集合,确定轮廓网格集合;
43、目标确定模块,用于根据所述轮廓网格集合,确定与所述建模网格类型对应的目标网格集合。
44、本技术实施例公开了一种电子设备,包括:
45、存储有可执行程序代码的存储器;
46、与所述存储器耦合的处理器;
47、所述处理器调用所述存储器中存储的所述可执行程序代码,执行上述任一实施例所述的方法。
48、本技术实施例公开了一种计算机可读存储介质,所述计算机可读存储介质存储计算机程序,其中,所述计算机程序在被处理器执行时,使得所述处理器执行上述任一实施例所述的方法。
49、通过本技术实施例公开的建模网格确定方法、装置、电子设备及存储介质,电子设备可以确定待生成的建模网格类型,并获取建模网格类型对应的至少一个目标元件的元件网格集合,电子设备可以根据各个目标元件的元件网格集合,确定各个目标元件对应的坐标值集合,该坐标值集合包括目标元件在三维坐标系包括的三个坐标轴上分别对应的坐标最大值以及坐标最小值,电子设备再根据各个目标元件对应的坐标值集合,确定建模网格类型对应的包围盒网格集合,根据包围盒网格集合,确定轮廓网格集合,根据轮廓网格集合,确定与建模网格类型对应的目标网格集合,通过实施该实施例,电子设备通过目标元件在各个坐标轴上的坐标最大值以及坐标最小值,从元件网格集合中筛选出包围盒中的包围盒网格,得到包围盒网格集合,再从包围盒网格集合中筛选出轮廓上的轮廓网格集合,最后通过轮廓网格集合确定目标网格集合,能够自动提取元件的建模网格,无需人工进行识别及手动提取,提高了提取元件的建模网格的效率。
- 还没有人留言评论。精彩留言会获得点赞!