一种基于机载LiDAR的杉木人工林标准地精准选设方法
本发明属于林业外业调查的标准地设计方法领域,具体涉及一种基于无人机机载lidar的杉木人工林标准地的选设方法。
背景技术:
1、标准地调查是全国森林资源连续清查、森林资源规划设计调查等森林资源调查中常用的用于调查林分整体生长情况的最重要技术手段,其通常是由经验丰富的林业技术人员经过全林分实地踏查后选定能代表整片林分或小班整体概况的固定大小的样地,通过实测标准地内的各种林分因子(如树高、胸径、冠幅、密度等)来调查整个林分或小班的森林资源、林分生长状况。标准地调查是一种由点推面的森林资源调查法,其林分代表精度的重要性不言而喻。对于立地条件、林分生长发育状况非常相近的平原森林,按传统方法调查的标准地对目标林分或小班的代表性相对较高。但是对于复杂山地上森林的标准地选设,其代表精度受限于以下2个因素:一是要求选设技术人员要具有丰富的调查经验,且调查人员的主观性亦会对标准地代表精度产生较大影响;二是在实际作业时无法全部测量目标林分的所有林木生长参数作为参照,踏查区域也仅占目标林分的一部分比例,且实地踏查出的标准地选设参照精度无法准确量化。而覆盖面广的森林资源调查工作更需耗费大量的人力、物力和财力,为节约成本、加快调查速度,调查人员设立标准地更多的会考虑其工作的便利性,而不注重标准地设立前的林分踏查。
2、上述限制主要是缺乏一种高效、节约的标准地和目标林分调查技术方法准确获取其林分生长参数,并量化2种尺度下的林分生长差距。随着科技的发展,无人机遥感技术广泛应用于林业,机载lidar可以快速提取不同尺度下的林分生长参数,并进行高精度定位匹配调查。为解决当前林业调查中快速选设出高代表精度标准地的问题,本发明充分考虑不同尺度下的林分生长状况调查时效和全面性,量化标准地与调查目标林分的林分参数差异,使用机载lidar的数据获取手段和计算机辅助决策,发明了一种更为高效和准确的标准地选设方案。
技术实现思路
1、本发明的目的在于提高林业调查中选设标准地的代表精度,降低标准地调查的成本投入,并提供一种基于机载lidar的杉木人工林标准地精准选设方法。本发明主要围绕标准地调查的三个关键点——标准地的整体林分高代表精度、整体林分参数获取的时效性、标准地选设的高效性,快速获取杉木林标准地选设前目标林分的整体生长发育参数,全面量化次选标准地群中每块标准地与整体林分参数的偏离情况,优选出代表精度高的标准地,为标准地选设提供一种新方法。
2、本发明所采用的具体技术方案如下:
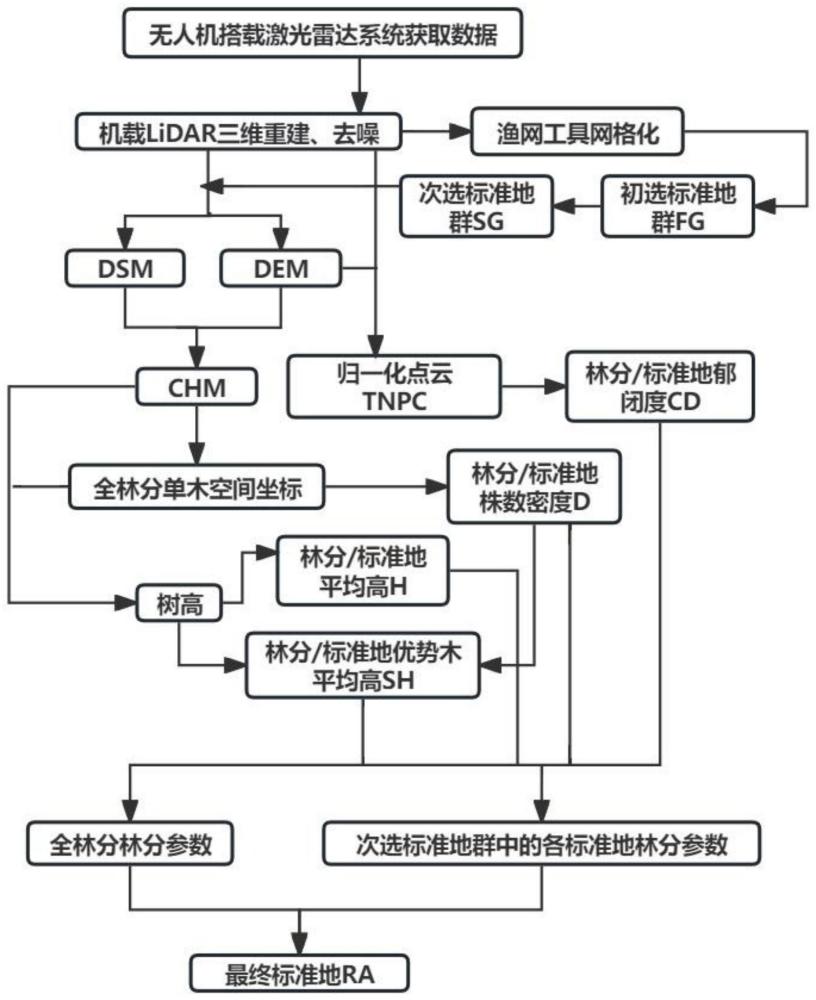
3、本发明提供了一种基于机载lidar的杉木人工林标准地精准选设方法,具体如下:
4、s1、对目标区域进行激光雷达点云数据采集;
5、s2、对s1中采集的目标区域点云数据进行三维重建和去噪,获得目标区域激光雷达点云数据;
6、s3、将s2中获得的所述激光雷达点云数据进行地面点分离,再分别构建成数字高程模型、数字表面模型和冠层高度模型,并根据目标杉木林空间矢量范围提取目标杉木林的归一化点云数据;
7、s4、将s3中获得的所述冠层高度模型,采用基于resunet卷积神经网络的单木分割方式,获取全林分的单木空间坐标,利用arcgis软件可视化全林单木空间位置,根据目标林分矢量空间范围统计计算林分总株数密度dt,并统计全林分的单木株数;
8、s5、结合s3中获得的所述冠层高度模型和s4中获得的单木空间坐标,采用局部最大值算法,获取单木树高,并统计计算林分平均高ht;
9、s6、对s3中获得的所述归一化点云数据,分离出乔木层、灌草层和地面层点云,根据乔木层点云数量占目标林分范围内的总点云的比例,得到林分郁闭度cdt;
10、s7、根据s4和s5获得的全林分单木树高和全林分的单木株数,统计计算杉木人工林整体的优势木平均高sht;
11、s8、根据目标区域的目标杉木林分整体形状、标准地面积大小和标准地形状要求,网格化目标林分作为初选标准地群fg,剔除fg中存在边缘效应的标准地,获得次选标准地群sg,按照s4~s7的处理方式,获得sg内的所有标准地的林分参数;所述标准地的林分参数包括标准地株数密度ds、标准地林分平均高hs、标准地林分郁闭度cds和标准地优势木平均高shs;
12、s9、基于s8获取的各标准地的林分参数,计算其与全林分的林分参数的总体偏离系数p,并结合s3构建的数字高程模型和数字表面模型判断作业条件,选择偏离系数最小且作业条件较好的作为目标林分的最终标准地ra;所述全林分的林分参数包括林分总株数密度dt、林分平均高ht、林分郁闭度cdt和优势木平均高sht。
13、作为优选,所述步骤s1中,激光雷达点云数据采集是借助大疆经纬matrice300rtk飞行平台搭载禅思l1激光雷达系统实现的。
14、作为优选,所述归一化点云数据的提取方法具体如下:
15、(1)利用进阶版dji terra软件进行激光雷达点云的三维重建;
16、(2)利用lidar 360进行激光雷达点云数据的去噪及归一化,进而获得归一化点云数据。
17、作为优选,所述步骤s3具体如下:
18、(1)采用改进的渐进加密三角网滤波算法进行地面点分离;
19、(2)利用不规则三角网的插值方法生成数字高程模型,公式如下:
20、z=b0+b1x+b2y+b3xy
21、式中:x、y为平面坐标,z为高程,b0、b1、b2、b3均为未知系数;
22、(3)利用反距离权重的插值方法生成数字表面模型,公式如下:
23、
24、
25、式中:zj代表插值点的高程值,z0代表已知激光脚点的高程值,λj代表激光脚点的权重,n代表指定范围内的激光脚点数量,p代表幂指数,dj代表第j个插值点和激光脚点之间的距离;
26、(4)数字高程模型dem与数字表面模型dsm的空间位置模型差值即为杉木林地的冠层高度模型chm,公式如下:
27、chm=dsm-dem。
28、进一步的,所述地面点分离的方法具体如下:
29、初选lidar点云中的地面点,再以初选的地面点为基础构建三角网,遍历所有点云判断各激光点到三角面的角度和距离是否在分离地面点的阈值范围内,若是的话,则在阈值范围内的标记为新地面点,若不是的话,则不标记为新地面点,从而筛滤出lidar点云中的所有地面点。
30、作为优选,所述步骤s4具体如下:
31、(1)对s3生成的冠层高度模型通过基于resunet卷积神经网络的单株树冠分割模型进行单木分割,获取全林分单木的空间坐标;
32、(2)利用arcgis软件,根据s2获得的激光雷达点云数据矢量化目标林分的空间范围a,叠加矢量化的全林分单木坐标点,统计计算获得全林分株数密度dt。
33、作为优选,所述步骤s5中,对全林分单木进行树高大小排列,选择前20%作为目标树种的优势木,计算其优势木平均高ht。
34、作为优选,所述步骤s8具体如下:
35、(1)利用arcgis软件,根据标准地面积大小和目标杉木林分整体形状,设计标准地的形状要求,网格化s3中矢量化的目标杉木林地范围,获得包含目标林分全部范围的初选样地群fg,剔除fg中存在边缘效应、目标树种分布不全的标准地,获得次选标准地群sg;
36、(2)参照s4~s7的方式,提取sg中的每个标准地,统计计算次选标准地群中每个标准地的林分株数密度ds、林分平均高hs、林分郁闭度cds和优势木平均高shs。
37、作为优选,所述步骤s9具体如下:
38、(1)基于s8获取的sg中各标准地的林分参数,计算其与所述全林分的林分参数的总体偏离系数p,计算公式如下:
39、
40、式中:p为总体偏离系数,保留2位小数;i为林分参数指标数量;ai为sg中的标准地的林分参数;bi为对应的全林分的林分参数;
41、(2)根据sg中的各标准地的偏离系数p,选取p值最小的3个标准地,叠加s3中构建的数字高程模型和数字表面模型,分析作业条件,结合其是否可作业情况,按p值从小到大进行选取的优先级排列,获得目标林分的最终标准地ra。
42、进一步的,所述作业条件包括标准地的到达难易程度、地形起伏变化情况、坡度和灌草茂密程度。
43、本发明相对于现有技术而言,具有以下有益效果:
44、(1)全面科学。基于机载lidar数据以科学的数据全面呈现出目标区域全林分参数,弥补了传统人工踏查法仅能根据视域范围内的林分生长情况得到经验值的不足;
45、(2)量化代表。优选次选标准地群里与全林分生长参数偏离系数最小的地块作为标准地,量化标准地代表全林分的精度,解决了凭传统人工目视经验选取标准地的代表性问题;
46、(3)高效节约。叠加林地dem进行作业地形条件的初判,从标准地的选设到最终调查作业,有效的缩短了外业调查的时间,节约了人力、物力成本。
- 还没有人留言评论。精彩留言会获得点赞!