非接触式目标对象手纹的采集方法及其设备与流程
本发明涉及手纹采集,具体地,涉及一种非接触式目标对象手纹的采集方法和非接触式手纹采集设备。
背景技术:
1、随着信息化大数据的发展,依靠生物特征进行身份认证的技术应用到越来越多的行业。应用较广的为人脸识别和指纹识别等生物特征识别技术。
2、现有的手纹识别技术通常采用接触式手纹采集设备实现。接触式手纹采集设备需要接触后才能采集,故而采集的区域受限,采集的范围较小且对手纹采集位置点要求较为严格,并且手纹图像的清晰度容易受到按压手纹时的力度影响,经常需要多次采集才可识别出手纹,采集清晰度不高,采集过程复杂,而且接触采集会存在一定的卫生风险。
3、因此,亟需一种新的技术方案,以至少部分地解决上述问题。
技术实现思路
1、为了至少部分地解决现有技术中存在的问题,提供一种非接触式目标对象手纹的采集方法和非接触式手纹采集设备。
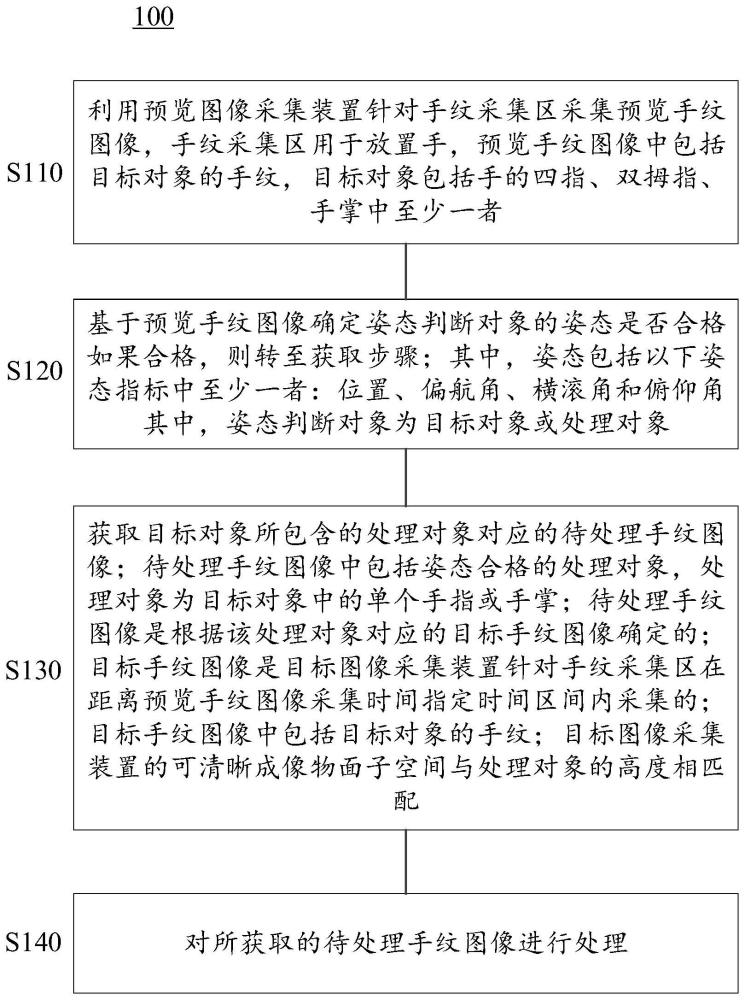
2、根据本发明一个方面,提供一种非接触式目标对象手纹的采集方法,包括:采集步骤:利用预览图像采集装置针对手纹采集区采集预览手纹图像,手纹采集区用于放置手,预览手纹图像中包括目标对象的手纹,目标对象包括手的四指、双拇指、手掌中至少一者;姿态判断步骤:基于预览手纹图像确定姿态判断对象的姿态是否合格,如果合格,则转至获取步骤;其中,姿态包括以下姿态指标中至少一者:位置、偏航角、横滚角和俯仰角;获取步骤:获取目标对象所包含的处理对象对应的待处理手纹图像;待处理手纹图像中包括姿态合格的处理对象,处理对象为目标对象中的单个手指或手掌;待处理手纹图像是根据该处理对象对应的目标手纹图像确定的;目标手纹图像是目标图像采集装置针对手纹采集区在距离预览手纹图像采集时间指定时间区间内采集的;目标手纹图像中包括目标对象的手纹;目标采集装置的可清晰成像物面子空间与处理对象的高度相匹配;处理步骤:对待处理手纹图像进行处理;其中,姿态判断对象为目标对象或处理对象。
3、示例性地,目标图像采集装置选自可清晰成像物面子空间部分重叠的多个图像采集装置,方法还包括:基于预览手纹图像确定处理对象的高度;根据处理对象的高度从多个图像采集装置中选择可清晰成像物面子空间与高度匹配的图像采集装置,作为处理对象对应的目标图像采集装置;获取步骤包括:利用目标图像采集装置针对手纹采集区在距离预览手纹图像采集时间指定时间区间内采集目标手纹图像,根据目标手纹图像确定待处理手纹图像;或者,获取目标图像采集装置针对手纹采集区与预览手纹图像同时采集的目标手纹图像,根据目标手纹图像确定待处理手纹图像;或者,获取待处理手纹图像;其中,待处理手纹图像是根据预览手纹图像确定的,预览手纹图像为目标手纹图像。
4、示例性地,预览图像采集装置是预览图像采集装置和多个图像采集装置组成的图像采集装置集合中焦距最短的图像采集装置。
5、示例性地,目标手纹图像是在结构光光源和非结构光光源照射下采集的,待处理手纹图像包括结构光通道和非结构光通道,处理步骤包括:对于每个处理对象,根据该处理对象对应的待处理手纹图像的结构光通道确定该处理对象的三维信息,根据三维信息对该处理对象对应的待处理手纹图像的非结构光通道进行展开变换,得到该处理对象对应的展开图像;根据展开图像得到该处理对象对应的模拟捺印图像。
6、示例性地,基于预览手纹图像确定姿态判断对象的姿态是否合格包括:基于预览手纹图像确定姿态判断对象中包含的处理对象的第一姿态指标,第一姿态指标包括以下姿态指标中至少一者:位置、偏航角、横滚角和俯仰角。
7、示例性地,基于预览手纹图像确定姿态判断对象中包含的处理对象的第一姿态指标,包括以下至少一者:根据预览手纹图像结构光通道中处理对象所对应的第一结构光重复单元和第二结构光重复单元,确定处理对象的俯仰角或横滚角;预览手纹图像是在结构光光源照射下采集的,预览手纹图像包括结构光通道;根据预览手纹图像结构光通道中处理对象所对应的第三结构光重复单元的两个条带点的高度,确定处理对象的横滚角或俯仰角;预览手纹图像是在结构光光源照射下采集的,预览手纹图像包括结构光通道;根据预览手纹图像非结构光通道中处理对象的位置和/或形状,确定该处理对象的位置和/或偏航角;预览手纹图像是在非结构光光源照射下采集的,预览手纹图像包括非结构光通道。
8、示例性地,姿态判断对象为包括多个处理对象的目标对象,基于预览手纹图像确定姿态判断对象的姿态是否合格包括:根据预览手纹图像结构光通道中两个处理对象各自对应的第四结构光重复单元的高度,确定目标对象的横滚角;或者,根据预览手纹图像非结构光通道中目标对象的位置和/或形状,确定目标对象的位置和/或偏航角;预览手纹图像是在非结构光光源照射下采集的,预览手纹图像包括非结构光通道。
9、示例性地,预览手纹图像是在结构光光源照射时采集的,姿态判断对象的横滚角和/或俯仰角是根据预览手纹图像的结构光通道中包括的结构光单元中选取的多个第五结构光重复单元确定的,处理对象的三维信息是根据待处理手纹图像的结构光通道中包括的结构光单元中选取的多个第六结构光重复单元确定的,第五结构光重复单元的密度小于第六结构光重复单元的密度。
10、示例性地,基于预览手纹图像确定姿态判断对象的姿态是否合格包括:判断姿态判断对象的位置和/或偏航角是否合格;如果姿态判断对象的位置和/或偏航角合格,则判断姿态判断对象的横滚角和/或俯仰角是否合格;如果姿态判断对象的横滚角和/或俯仰角合格,则姿态判断对象的姿态合格。
11、示例性地,姿态判断对象为处理对象,在处理步骤之前,方法还包括:判断目标对象包含的各处理对象所对应的待处理手纹图像的数目是否均达到预设数目阈值,若是,则转至处理步骤,否则,则返回执行至少获取步骤;根据该处理对象对应的待处理手纹图像的结构光通道确定该处理对象的三维信息,包括:根据该处理对象对应的选定待处理手纹图像的结构光通道确定该处理对象的三维信息,选定待处理手纹图像是该处理对象对应的预设数目阈值个待处理手纹图像中满足质量要求的待处理手纹图像。
12、示例性地,姿态判断对象为目标对象,在处理步骤之前,方法还包括:判断目标对象所对应的目标手纹图像的数目是否均达到预设数目阈值,若是,则转至处理步骤,否则,则返回执行至少获取步骤;根据该处理对象对应的待处理手纹图像的结构光通道确定该处理对象的三维信息,包括:根据该处理对象对应的选定待处理手纹图像的结构光通道确定该处理对象的三维信息,选定待处理手纹图像是该处理对象对应的预设数目阈值个待处理手纹图像中满足质量要求的待处理手纹图像。
13、根据本发明的另一方面,还提供了一种非接触式手纹采集设备,包括处理器和存储器,其中,所述存储器中存储有计算机程序指令,所述计算机程序指令被所述处理器运行时用于执行上述的非接触式目标对象手纹的采集方法。
14、示例性地,设备还包括多个图像采集装置,多个图像采集装置的镜头围绕中心线设置且面向手纹采集区,其中,多个图像采集装置分别具有距离其最佳物面前后景深范围内的可清晰成像物面子空间,且多个图像采集装置的可清晰成像物面子空间部分地重叠,多个图像采集装置的可清晰成像物面子空间共同形成可清晰成像总空间,手纹采集区包括可清晰成像物面总空间,多个图像采集装置的最佳物面在手纹采集区内的位置不同。
15、根据本发明实施例的非接触式目标对象手纹的采集方法及非接触式手纹采集设备,利用预览图像采集装置采集的预览手纹图像进行姿态判断对象的姿态判断,在姿态合格之后,根据与处理对象高度相匹配的目标图像采集装置所拍摄的目标手纹图像来获取处理对象的待处理手纹图像。这种方案通过预览图像采集装置保证快速的姿态判断,并根据处理对象高度确定与其高度匹配的目标图像采集装置,使得本发明实施例的手纹采集设备可以在更大空间范围内、更宽松的手部姿态限制下对手纹清晰成像,从而减少对用户配合度的要求,提高用户体验。
16、在
技术实现要素:
中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
17、以下结合附图,详细说明本发明的优点和特征。
- 还没有人留言评论。精彩留言会获得点赞!