一种智能手机面板表面缺陷检测方法与流程
本发明涉及图像分割,具体涉及一种智能手机面板表面缺陷检测方法。
背景技术:
1、在智能手机面板生产过程中,由于外界环境的影响,部分智能手机面板表面可能出现划伤、脏污、坑点等缺陷。通常需要基于图像处理的方法对智能手机面板表面进行缺陷检测。现有技术通常利用迭代自组织聚类算法,根据智能手机面板表面图像上的像素点进行聚类分析,从而根据得到的各个聚类簇中像素点的数量筛选出缺陷区域。
2、但是由于生产环境因素以及手机面板材质的影响,可能出现部分缺陷边缘与背景的区分度较小,对应的部分属于缺陷边缘模糊区域的像素点对应的灰度值由于与背景区域的灰度值相近且距离相近,使得根据迭代自组织聚类算法的最小距离度量的合并操作,而被不断地被分布到不同的聚类簇中,使得其对应的实际的缺陷类型难以实现区分,也即现有技术基于迭代自组织聚类算法对智能手机面板表面进行缺陷检测的效果较差。
技术实现思路
1、为了解决现有技术基于迭代自组织聚类算法对智能手机面板表面进行缺陷检测的效果较差的技术问题,本发明的目的在于提供一种智能手机面板表面缺陷检测方法,所采用的技术方案具体如下:
2、本发明提出了一种智能手机面板表面缺陷检测方法,所述方法包括:
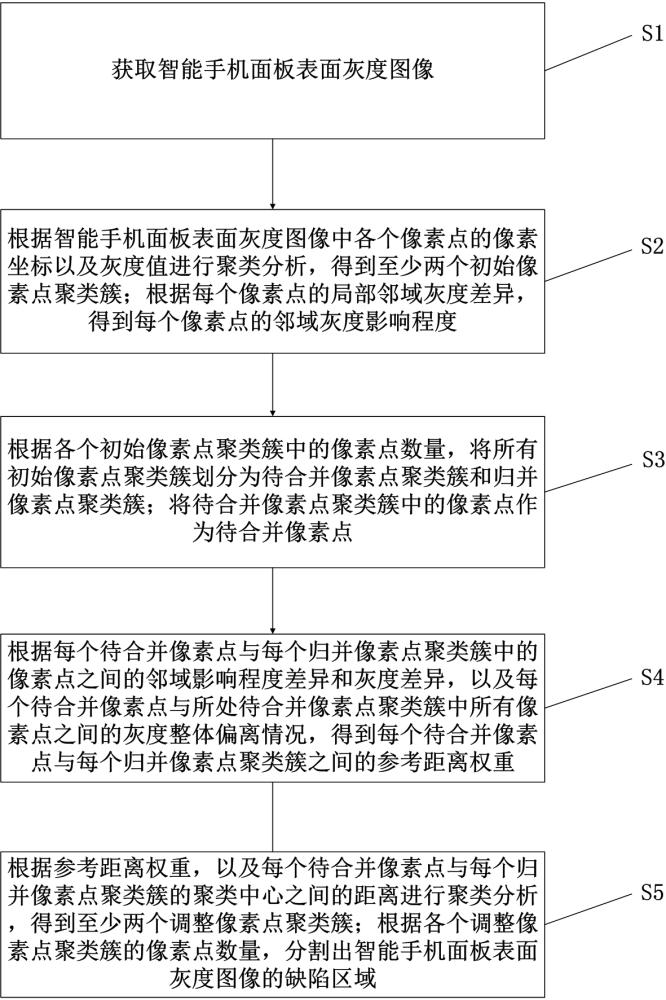
3、获取智能手机面板表面灰度图像;
4、根据智能手机面板表面灰度图像中各个像素点的像素坐标以及灰度值进行聚类分析,得到至少两个初始像素点聚类簇;根据每个像素点的局部邻域灰度差异,得到每个像素点的邻域灰度影响程度;
5、根据各个初始像素点聚类簇中的像素点数量,将所有初始像素点聚类簇划分为待合并像素点聚类簇和归并像素点聚类簇;将待合并像素点聚类簇中的像素点作为待合并像素点;
6、根据每个待合并像素点与每个归并像素点聚类簇中的像素点之间的邻域影响程度差异和灰度差异,以及每个待合并像素点与所处待合并像素点聚类簇中所有像素点之间的灰度整体偏离情况,得到每个待合并像素点与每个归并像素点聚类簇之间的参考距离权重;
7、根据所述参考距离权重,以及每个待合并像素点与每个归并像素点聚类簇的聚类中心之间的距离进行聚类分析,得到至少两个调整像素点聚类簇;根据各个调整像素点聚类簇的像素点数量,分割出智能手机面板表面灰度图像的缺陷区域。
8、进一步地,所述初始像素点聚类簇的获取方法包括:
9、在智能手机面板表面灰度图像对应的图像坐标系的基础上,以像素点的灰度值为竖轴,构建空间直角坐标系;在所述空间直角坐标系中,获取每个像素点对应的三维坐标;通过迭代自组织聚类算法根据所有像素点的三维坐标进行初次聚类,得到至少两个初始像素点聚类簇。
10、进一步地,所述邻域灰度影响程度的获取公式包括:
11、
12、其中,为所述空间直角坐标系中第个像素点的邻域灰度影响程度;为所述空间直角坐标系中第个像素点的预设邻域范围中的像素点数量;为所述空间直角坐标系中第个像素点的预设邻域范围中,第个像素点与第个像素点之间的灰度差异;所述空间直角坐标系中第个像素点的预设邻域范围中,第个像素点的像素坐标与第个像素点的像素坐标之间的距离;为所述空间直角坐标系中第个像素点的预设邻域范围中,第个像素点的三维坐标与第个像素点的三维坐标之间的距离,为归一化函数。
13、进一步地,所述根据各个初始像素点聚类簇中的像素点数量,将所有初始像素点聚类簇划分为待合并像素点聚类簇和归并像素点聚类簇的方法包括:
14、将像素点数量小于预设第一数量阈值的初始像素点聚类簇作为待合并像素点聚类簇;将待合并像素点聚类簇外的其他初始像素点聚类簇,作为归并像素点聚类簇。
15、进一步地,所述参考距离权重的获取方法包括:
16、将每个待合并像素点的灰度值与其所处待合并像素点聚类簇中所有像素点的灰度值均值之间的差异,作为每个待合并像素点的参考灰度偏差;将所述参考灰度偏差与对应的待合并像素点聚类簇中所有像素点的灰度值均值之间的比值,作为每个待合并像素点的灰度标准偏差值;
17、根据每个待合并像素点与指向每个归并像素点聚类簇方向上像素点之间的局部灰度差异,得到每个待合并像素点与每个归并像素点聚类簇之间的灰度差异特征值;
18、根据每个待合并像素点与每个归并像素点聚类簇中像素点之间的局部邻域灰度影响程度,得到每个待合并像素点与每个归并像素点聚类簇之间的邻域影响差异特征值;
19、根据所述灰度标准偏差值、所述灰度差异特征值和所述邻域影响差异特征值,得到每个待合并像素点与每个归并像素点聚类簇之间的参考距离权重,所述灰度标准偏差值与所述参考距离权重呈正相关关系,所述灰度差异特征值和所述邻域影响差异特征值均与所述参考距离权重呈负相关关系。
20、进一步地,所述灰度差异特征值的获取方法包括:
21、依次将每个待合并像素点作为目标待合并像素点;依次将每个归并像素点聚类簇作为目标归并像素点聚类簇;在目标待合并像素点指向目标归并像素点聚类簇的聚类中心方向上,将与目标待合并像素点距离最近的预设第二数量个像素点,作为目标归并像素点聚类簇中的对比归并像素点;将所有对比归并像素点的灰度值均值与所述目标待合并像素点的灰度值之间的差异,作为目标待合并像素点与目标归并像素点聚类簇之间的灰度差异特征值。
22、进一步地,所述邻域影响差异特征值的获取方法包括:
23、将所有对比归并像素点的邻域灰度影响程度的均值与所述目标待合并像素点的邻域灰度影响程度之间的差异,作为目标待合并像素点与目标归并像素点聚类簇之间的邻域影响差异特征值。
24、进一步地,所述根据所述灰度标准偏差值、所述灰度差异特征值和所述邻域影响差异特征值,得到每个待合并像素点与每个归并像素点聚类簇之间的参考距离权重的方法包括:
25、将所述邻域影响差异特征值与所述灰度标准偏差值的乘积,作为参考乘积;将所述参考乘积与预设调节参数的和值,作为参考和值;将所述灰度差异特征值与所述参考和值的比值,作为每个待合并像素点与每个归并像素点聚类簇之间的参考距离权重。
26、进一步地,所述调整像素点聚类簇的获取方法包括:
27、计算每个待合并像素点与每个归并像素点聚类簇的聚类中心之间的欧氏距离;将所述参考距离权重与所述欧氏距离的比值,作为每个待合并像素点与每个归并像素点聚类簇之间的归并必要性;将每个待合并像素点划分到对应的最大归并必要性的归并像素点聚类簇中,得到各个调整像素点聚类簇。
28、进一步地,所述根据各个调整像素点聚类簇的像素点数量,分割出智能手机面板表面灰度图像的缺陷区域的方法包括:
29、计算各个调整像素点聚类簇的像素点数量的归一化值,将所述像素点数量的归一化值小于预设第三数量阈值的调整像素点聚类簇,作为缺陷像素点聚类簇;将所有缺陷像素点聚类簇中所有像素点对应的区域分割出来,作为智能手机面板表面灰度图像的缺陷区域,所述预设第三数量阈值大于0且小于1。
30、本发明具有如下有益效果:
31、考虑到迭代自组织聚类算法在处理图像时,通常需要结合各个样本点也即像素点的位置信息和灰度信息,因此像素点的灰度信息和位置信息均会对像素点的聚类簇归属产生影响,而基于迭代自组织聚类算法的原理,初步划分的像素点数量较少的聚类簇中的像素点会被进一步地归并到不同的聚类簇中,而在智能手机面板表面缺陷检测的场景中,缺陷边缘模糊区域的像素点对应的聚类簇通常对应像素点数量较少的待合并像素点聚类簇。因此为了使得缺陷区域更加完整,进一步地需要将属于缺陷边缘模糊区域的待合并像素点聚类簇中的像素点,尽可能划分对应的缺陷区域中。迭代自组织聚类算法基于最小距离调整的方法仅根据样本空间中像素点之间的距离进行归并,虽然部分缺陷边缘模糊区域的灰度值与正常区域接近,但是对应的邻域中像素点的灰度分布通常存在差异,因此可以根据该特点进行分析,提高灰度差异影响聚类簇划分的权重,根据每个像素点的局部邻域灰度差异,得到每个像素点的邻域灰度影响程度,进一步地结合邻域灰度影响程度,进一步地在邻域灰度影响程度的基础上结合灰度差异,得到参考距离权重,使得结合参考距离权重和距离所进一步地聚类分析得到的调整像素点聚类簇更加准确,也即提高属于缺陷边缘模糊区域被划分到对应缺陷区域的像素点聚类簇的权重,得到更加准确的缺陷区域,使得对智能手机面板表面进行缺陷检测的效果更好。
- 还没有人留言评论。精彩留言会获得点赞!