基于机载点云的铁路中线全自动提取方法及系统与流程
本发明涉及测绘遥感,具体涉及一种基于机载点云的铁路中线全自动提取方法及系统。
背景技术:
1、随着铁路建设的快速发展,大量既有铁路需要进行扩能改造以提高运营速度与能力,而测量现有铁路中线是铁路改造的重要前期工作之一。
2、铁路中线测量多采用人工方式进行,在全站仪和轨道小车上安装棱镜进行逐点人工实测,此类方法是劳动密集型方法,效率较低,成本高,而且只能在天窗期内进行测量,难以满足目前铁路建设发展的要求。目前,为克服上述问题,非接触三维激光扫描技术在铁路勘察设计中逐步得到了应用,现有利用三维激光扫描技术进行铁路中线测量的方案通常是通过固定设站或移动式三维激光测量,获取高密度、高精度的点云数据,利用点云数据自动检测并重建铁路轨道。此类方法仍然需要在天窗期进行,作业时间受到限制。近年来随着无人机技术的发展,机载激光点云技术开始应用于铁路线复测项目中,该方法可摆脱天窗期限制,效率较高,然而机载点云相较架站式三维激光扫描获取的铁路点云数据较为稀疏,主要靠人工标注手工提取铁路中线。
3、因此,有必要提出新的方法,克服目前利用机载激光点云技术进行铁路线复测的缺陷。
技术实现思路
1、本发明的目的是提供一种基于机载点云的铁路中线全自动提取方法及系统,以解决目前利用机载激光点云技术进行铁路线复测存在的点云数据稀疏、需依靠人工标注手工提取铁路中线的问题。
2、为了达到上述目的,本发明所采用的技术方案为:
3、基于机载点云的铁路中线全自动提取方法,所述方法包括:
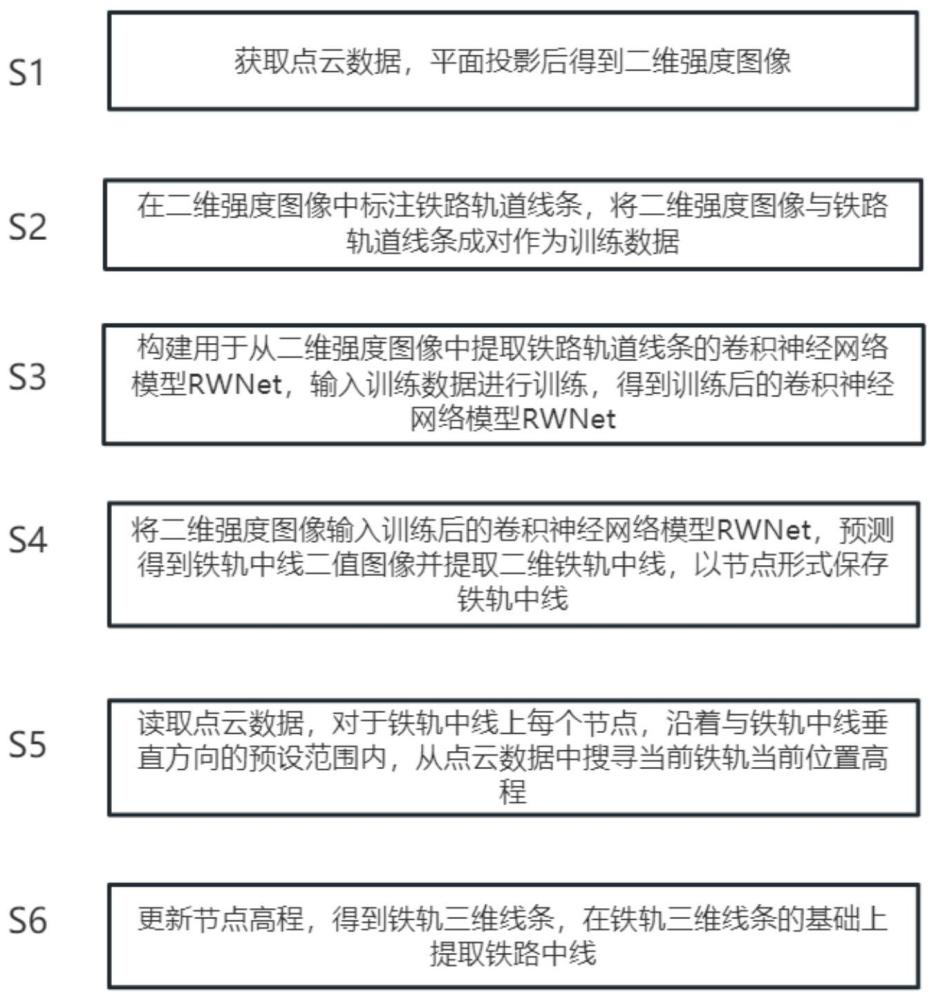
4、获取点云数据,平面投影后得到二维强度图像;
5、在二维强度图像中标注铁路轨道线条,将二维强度图像与铁路轨道线条成对作为训练数据;
6、构建用于从二维强度图像中提取铁路轨道线条的卷积神经网络模型rwnet,输入训练数据进行训练,得到训练后的卷积神经网络模型rwnet;
7、将二维强度图像输入训练后的卷积神经网络模型rwnet,预测得到铁轨中线二值图像并提取二维铁轨中线,以节点形式保存铁轨中线;
8、读取点云数据,对于铁轨中线上每个节点,沿着与铁轨中线垂直方向的预设范围内,从点云数据中搜寻当前铁轨当前位置高程;
9、更新节点高程,得到铁轨三维线条,在铁轨三维线条的基础上提取铁路中线。
10、进一步地,获取点云数据,平面投影后得到二维强度图像,包括:
11、读取点云数据,点云数据的范围为(xmin,xmax,ymin,ymax);
12、将点云数据投影到xoy平面上形成平面投影后的二维强度图像i;
13、将平面投影后的二维强度图像i划分为格网,每个格网p代表二维强度图像i中的一个像素,格网p宽度为s,二维强度图像i的宽w与高h为:
14、h=(ymax-ymin)/s
15、w=(wmax-wmin)/s
16、每个格网p的像素值ip为落到该格网内点云强度平均值:
17、
18、其中:
19、n为投影到格网p内的点云数量;
20、intensityi为每个点云强度值。
21、进一步地,对二维强度图像i进行归一化。
22、进一步地,构建用于从二维强度图像中提取铁路轨道线条的卷积神经网络模型rwnet,包括:
23、卷积神经网络模型rwnet采用编码解码结构;
24、采用残差网络resnet的特征提取结构作为编码结构,采用语义分割模型解码器作为解码结构。
25、进一步地,解码结构包含四个采样间隔为2的上采样层,用于将编码结构生成的特征恢复到与原始输入强度图像同尺寸;
26、每个上采样层采样之后,采用两个卷积层对上采样结果进行平滑,最终输出与输入图像相同尺寸的铁轨中线二值图像。
27、进一步地,将二维强度图像输入训练后的卷积神经网络模型rwnet,预测得到铁轨中线二值图像并提取二维铁轨中线,包括:
28、卷积神经网络模型rwnet预测得到铁轨中线二值图像;
29、通过矢量化铁轨中线二值图像,提取二维铁轨中线。
30、进一步地,以节点形式保存铁轨中线,包括:
31、对左右铁轨线条矢量化后以相同的间距内插节点;
32、以节点形式保存线条,节点间隔为s。
33、进一步地,当前铁轨当前位置高程为局部高程极大值。
34、进一步地,更新节点高程,得到铁轨三维线条,在铁轨三维线条的基础上提取铁路中线,包括:
35、获取左右铁轨三维线条;
36、对于左铁轨三维线条上的第i个节点li,计算右铁轨三维线条上每个节点rj与其直线距离dij;
37、找到与li直线距离dij最小的右铁轨三维线条节点rj;
38、根据li与rj计算得到铁路中线节点mij坐标:
39、mij=(li+rj)/2;
40、对于左铁轨三维线条上每个节点,重复计算,依次连接mij,生成铁路中线。
41、另一方面,提供基于机载点云的铁路中线全自动提取系统,所述系统用于实施所述的方法,包括:
42、平面投影模块,用于获取点云数据,平面投影后得到二维强度图像;
43、标注模块,用于在二维强度图像中标注铁路轨道线条,将二维强度图像与铁路轨道线条成对作为训练数据;
44、模型训练模块,用于构建用于从二维强度图像中提取铁路轨道线条的卷积神经网络模型rwnet,输入训练数据进行训练,得到训练后的卷积神经网络模型rwnet;
45、预测模块,用于将二维强度图像输入训练后的卷积神经网络模型rwnet,预测得到铁轨中线二值图像并提取二维铁轨中线,以节点形式保存铁轨中线;
46、高程提取模块,用于读取点云数据,对于铁轨中线上每个节点,沿着与铁轨中线垂直方向的预设范围内,从点云数据中搜寻当前铁轨当前位置高程;
47、铁路中线提取模块,用于更新节点高程,得到铁轨三维线条,在铁轨三维线条的基础上提取铁路中线。
48、与现有技术相比,本发明的有益效果如下:
49、本发明提供了一种基于机载点云的铁路中线全自动提取方法及系统,将三维激光点云投影到xoy平面上,转换为二维强度图像,利用深度学习方法识别二维强度图像中铁路轨道平面位置,接着结合点云数据与铁路轨道线条平面位置提取铁轨线条高程信息,得到铁路轨道三维线条,最后根据铁路左右轨线条计算得到铁路中线位置,可以在点云数据较为稀疏的情况下,实现铁路中线的全自动提取,提高效率的同时,也保障了结果的准确性。
技术特征:
1.基于机载点云的铁路中线全自动提取方法,其特征在于:
2.根据权利要求1所述的基于机载点云的铁路中线全自动提取方法,其特征在于:
3.根据权利要求2所述的基于机载点云的铁路中线全自动提取方法,其特征在于
4.根据权利要求3所述的基于机载点云的铁路中线全自动提取方法,其特征在于:
5.根据权利要求4所述的基于机载点云的铁路中线全自动提取方法,其特征在于:
6.根据权利要求5所述的基于机载点云的铁路中线全自动提取方法,其特征在于:
7.根据权利要求6所述的基于机载点云的铁路中线全自动提取方法,其特征在于:
8.根据权利要求7所述的基于机载点云的铁路中线全自动提取方法,其特征在于:
9.根据权利要求8所述的基于机载点云的铁路中线全自动提取方法,其特征在于:
10.基于机载点云的铁路中线全自动提取系统,其特征在于:
技术总结
本发明涉及一种基于机载点云的铁路中线全自动提取方法及系统。利用机载激光点云复测铁路线存在点云稀疏、需依靠人工标注手工提取铁路中线的问题。本方法获取点云数据,平面投影后得到二维强度图像,标注铁路轨道线条,成对作为训练数据;构建卷积神经网络模型RWNet,输入训练数据进行训练;将二维强度图像输入训练后的模型,预测得到铁轨中线二值图像并提取二维铁轨中线;读取点云数据,沿着与铁轨中线垂直方向的预设范围内,从点云数据中搜寻当前铁轨当前位置高程;更新得到铁轨三维线条,在铁轨三维线条的基础上提取铁路中线。本方法可以在点云数据较为稀疏的情况下,实现铁路中线的全自动提取,提高效率的同时,也保障了结果的准确性。
技术研发人员:魏域君,李丹,刘雨鑫,刘亚林,张卫龙,石硕,武瑞宏,张占忠,田社权
受保护的技术使用者:中铁第一勘察设计院集团有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!