一种液体杂质颗粒系粒径分布反演方法和系统
本发明属于光散射微小颗粒检测领域,更具体地,涉及一种液体杂质颗粒系粒径分布反演方法和系统。
背景技术:
1、颗粒是微小的离散物质,包含尺度范围从亚纳米至毫米量级的微小固体、液滴或气泡,也可以是具有生命力的病毒等。由大量不同粒度颗粒组成的分散系称为多分散颗粒系,如烟雾、血液和气泡群等。各类颗粒群广泛应用于环境监测、化学工业、医药制造等工业生产及科学研究领域。颗粒群的物理等各方面特性生产具有至关重要的影响,包括粒径分布、形状分布、密度分布等,越来越多的行业需要对颗粒群特性进行检测,其已成为实用测量领域的重要研究课题。
2、动态光散射技术是测量纳米及亚微米量级颗粒群粒径分布的重要方法,主要通过反演散射光的相关函数得到颗粒群的粒径分布,但是从含噪的光强自相关函数反演颗粒粒度分布属于病态问题,原始数据微小的扰动都会导致解的严重偏离。
3、专利cn115127965a公开一种混杂颗粒系粒径分布反演方法与系统,属于光散射微小颗粒检测领域。包括:根据若干散射角度测量到的未知粒径分布的待测样品的光强自相关函数,通过累积量法计算在若干散射角度下待测样品的平均粒径,接着将该平均粒径输入至采用最优平滑因子训练好的混杂颗粒系粒径分布反演回归网络,最终得到待测样品的粒径分布曲线,所述最优平滑因子根据标定的动态光散射系统的噪声水平,评价并比较混杂颗粒系粒径分布反演回归网络反演效果得到。该方法适用于球形颗粒系、非球形颗粒系及存在多种不同性质与形态颗粒物的混杂颗粒系,且粒径分布反演速度快、效果好、非接触,可满足实际检测环境下的多种需求。然而,该方法应用于液体杂质颗粒系粒径分布反演时,其反演准确度下降,并且算法运算时间大幅增加。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提供一种液体杂质颗粒系粒径分布反演方法和系统,旨在提升液体杂质颗粒系(尤其是在高压设备绝缘油、机械设备润滑油等油液杂质颗粒系下)粒径分布反演准确度和运算效率。
2、为实现上述目的,第一方面,本发明提供了一种液体杂质颗粒系粒径分布反演方法,包括:
3、s1.获取不同散射角度处测量到的待测样品的光强自相关函数,所述测量是通过多角度动态光散射系统;
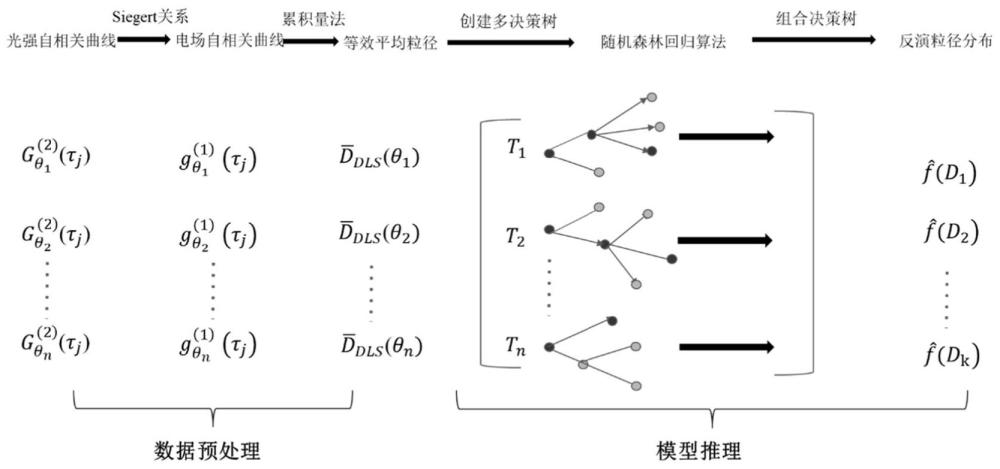
4、s2.根据各散射角度处测量到的待测样品的光强自相关函数,根据siegert关系求出归一化电场自相关函数,通过累积量法,计算在各散射角度下待测样品的等效平均粒径;
5、s3.将各散射角度下待测样品的等效平均粒径输入至训练好的随机森林粒径分布反演模型,得到待测样品的粒径分布;
6、所述随机森林粒径分布反演模型经过以下方式训练,以确定最佳决策树数量:
7、(1)仿真计算多个散射角度下的颗粒系模拟样品中各粒径的颗粒物所对应的散射光强分数,进一步计算得到各散射角度下的无噪声电场自相关函数与等效平均粒径;
8、(2)将预设的噪声水平与高斯噪声分布函数相乘,再将结果与各散射角度下的等效平均粒径相加,得到对应的含噪等效平均粒径;
9、(3)将模拟样品各散射角度下含噪等效平均粒径作为模型输入,对应模拟样品的粒径分布作为模型输出,得到数据集;
10、(4)将数据集划分为训练集和验证集,训练集用于模型训练,验证集用于比较采用不同决策树数量训练的随机森林粒径分布反演模型在先验的粒径反演范围内的反演效果评价值;
11、(5)根据反演效果评价值,确定最佳决策树数量。
12、优选地,步骤(2)中,在样本中添加噪声的方式如式所示:
13、
14、其中,为散射角θr处含噪的等效平均粒径,为散射角θr处等效平均粒径的理论值,为所有散射角处等效平均粒径的平均值,a为添加的噪声水平,值满足均值为0、方差为1的高斯分布。
15、优选地,步骤(5)中,反演效果评价值计算公式如下:
16、
17、
18、其中,di为颗粒系中颗粒物的粒径,f(di)为训练使用的颗粒系粒度分布曲线,为随机森林粒径分布反演模型推理得到的颗粒系粒径分布曲线,n为反演范围内所取的采样点个数,m为样本集中样本的个数。
19、优选地,测量时使用的不同散射角度均来自最优散射角度组合,所述最优散射角度组合通过以下方式确定:
20、(1)在设定模拟的不同粒径分布、噪声水平和峰值粒径范围后,散射角度从0°到170°间隔相同固定角度变化,计算每个散射角度所有颗粒物的含噪电场自相关函数与等效平均粒径;
21、(2)属于同一种模拟粒径分布的各等效平均粒径作为模型输入,对应的模拟粒径分布作为模型输出,构成模拟数据集,并将模拟数据集切分成训练集和验证集,送入随机森林粒径分布反演模型中训练;
22、(3)通过包外估计方法,确定训练好的随机森林粒径分布反演模型输入各特征粒径的重要性,所述特征粒径为步骤(1)中每个散射角度对应的等效平均粒径;
23、(4)选取重要性大于所有重要性平均值的散射角度作为备选的最优散射角度,并记录重要性各极大值点前后的两个角度,通过二分法更精细的确定重要性各极大值对应的散射角度;
24、(5)备选的最优散射角度与未重复的更精细的重要性极大值对应的散射角度,共同构成最优散射角度组合。
25、需要说明的是,本发明通过上述方式确定最优散射角度组合,基于最优散射角度处测量到的待测样品的光强自相关函数,进而计算等效平均粒径,使用最佳散射角度组得到的等效平均粒径作为随机森林反演模型的输入,会使得反演模型预测的准确度更高,即预测值与理论值的偏离越小。
26、优选地,所述通过二分法更精细的确定重要性各极大值对应的散射角度,具体为:
27、1)将极大值点相邻的两个散射角度作为区间的两个端点;
28、2)确定该区间的中间点;
29、3)比较左端点、中间点、右端点三处散射角度对应的重要性的大小,取较大的两者作为端点,更新区间;
30、4)迭代2)-3),直至区间跨度小于2°,以该区间的中位数作为各极大值对应的散射角度。
31、优选地,所述决策树数量的取值范围为[20,200]。
32、优选地,将以决策树数量为横坐标、反演效果评价指标为纵坐标的曲线中极小值对应的横坐标,确定为最佳决策树数量;若该曲线不存在极小值,则修改决策树数量范围,直至该曲线出现极小值;若该曲线仍然不存在极小值,选定较小数量的决策树数量为最佳决策树数量。
33、为实现上述目的,第二方面,本发明提供了一种液体杂质颗粒系粒径分布反演系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述存储器存储计算机程序,该计算机程序被处理器执行时实现如第一方面所述的方法。
34、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
35、本发明提出一种液体杂质颗粒系粒径分布反演方法和系统,在确定随机森林的最佳决策树时,通过调节仿真颗粒系的粒径分布,计算多个散射角度下的颗粒系模拟样品中各粒径的颗粒物所对应的散射光强分数,接着进一步计算得到若干散射角度下的无噪声电场自相关函数与等效平均粒径。再将预设的噪声水平与高斯噪声分布函数相乘,将结果与若干散射角度下的等效平均粒径相加,得到对应的含噪等效平均粒径。通过“留出法”将得到的含噪等效平均粒径集和对应的粒径分布集划分为训练集和验证集,计算得到的模拟样品的等效平均粒径作为模型输入,对应的模拟样品粒径分布作为模型输出,训练集用作模型训练,验证集用来比较采用不同决策树数量训练的颗粒系粒径分布反演模型在先验的粒径反演范围内的反演效果评价值。根据反演效果评价值,确定最佳决策树数量。通过该方式确定的随机森林粒径分布反演模型,反演速度很快,对于含噪的数据而言反演结果更加稳定,且对于峰值粒径的反演效果表现出色,满足产品领域的检测精度要求。
36、另外,本发明提出的反演方法从训练集训练得到序列化的模型后,可以实时保存在磁盘中,使用时可以直接调用而无需再次训练。此外,随机森林是一种高度并行化的结构,因此在实际推理时,会大大加快推理进程,可满足实际检测环境下的多种需求。而且,其枝节点判决主要使用逻辑判决,而非传统的正则化算法和神经网络算法的密集型浮点数计算,因此,使用本发明的模型对于硬件设备的计算力要求不高,其更适合在小型嵌入式开发板上部署以成为及成套的粒径反演设备。
- 还没有人留言评论。精彩留言会获得点赞!