车长确定方法、测距模型训练方法、设备及存储介质与流程
本技术涉及图像处理,尤其涉及一种车长确定方法、测距模型训练方法、设备及存储介质。
背景技术:
1、随着社会经济的不断发展以及人们生活水平的提高,我国的机动车保有量也在高速增长,对交通的管理也提出了更高的要求。车辆长度作为车辆的重要属性,是超载、非法改装等违规、违法行为的关键检测依据,也是停车场、收费站等场景中对车辆计费的重要标准。
2、车辆抓拍设备分为车头抓拍设备、车尾抓拍设备和车身抓拍设备,车头抓拍设备和车尾抓拍设备用于检测车辆车牌号码,车身抓拍设备用于获取车辆长度信息,但是由于场地限制,车身抓拍设备的架设位置与车辆之间的距离较近,因此车身抓拍设备的拍摄视场有限,只能获取部分车辆特征,输出的车辆长度信息准确度不高。若增加车辆与车身抓拍设备的距离,又容易受到其他车辆或行人的干扰,影响获取到的车辆长度的准确性,若在其他位置增设抓拍设备来获取车辆长度信息又会增加成本。
3、因此,如何有效且低成本的检测车辆长度,是一个需要解决的问题。
技术实现思路
1、本技术提供一种车长确定方法、测距模型训练方法、设备及存储介质,用于有效且低成本的检测出车辆长度。
2、为实现上述技术目的,本技术采用如下技术方案:
3、第一方面,本技术实施例提供了一种车长确定方法,该方法包括:
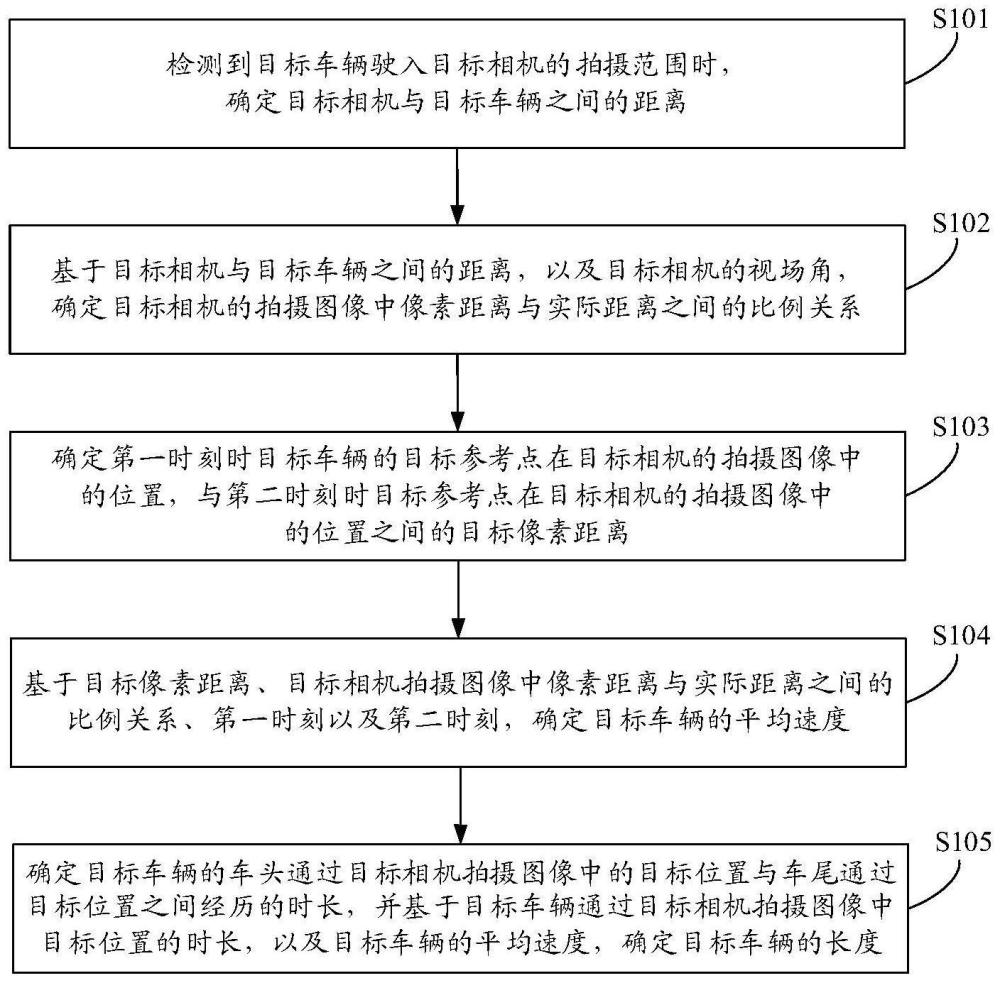
4、检测到目标车辆驶入目标相机的拍摄范围时,确定目标相机与目标车辆之间的距离;
5、基于目标相机与目标车辆之间的距离,以及目标相机的视场角,确定目标相机的拍摄图像中像素距离与实际距离之间的比例关系;
6、确定第一时刻时目标车辆的目标参考点在目标相机的拍摄图像中的位置,与第二时刻时目标参考点在目标相机的拍摄图像中的位置之间的目标像素距离;
7、基于目标像素距离、目标相机拍摄图像中像素距离与实际距离之间的比例关系、第一时刻以及第二时刻,确定目标车辆的平均速度;
8、确定目标车辆的车头通过目标相机拍摄图像中的目标位置与车尾通过目标位置之间经历的时长,并基于目标车辆通过目标相机拍摄图像中目标位置的时长,以及目标车辆的平均速度,确定目标车辆的长度。
9、本技术提供的技术方案至少带来以下有益效果:通过确定目标相机与目标车辆之间的距离,从而可以结合目标相机的视场角,确定目标相机拍摄图像中像素距离与实际距离之间的比例关系,则通过检测两个不同时刻的拍摄图像中目标车辆的目标参考点之间的像素距离,就可以得知目标车辆在这不同时刻之中移动的真实距离,从而确定目标车辆的行驶速度,再通过目标车辆驶入及驶出目标相机的拍摄图像经历的时长,即可确定目标车辆的长度。如此一来,在目标相机的视野有限的情况下,不需要拍摄车辆的全景图像,也可以准确确定出目标车辆的长度,同时无需增加传感器、雷达、其他相机等辅助测距的装置,不会增加成本,车长计算逻辑较为简单,可以复用在已有的用于拍摄车身的相机中。
10、在一种可能的实现方式中,确定目标相机与目标车辆之间的距离,包括:确定预设数量个距离区间;确定目标相机与目标车辆之间的距离落在各个距离区间的置信度,以及与每个置信度一一对应的偏移量;置信度用于指示目标相机与目标车辆之间的距离落在距离区间的可信程度,偏移量用于指示目标相机与目标车辆之间的距离落在距离区间时相对于距离区间的预设位置的偏移量;将最大的置信度指示的距离区间确定为目标相机与目标车辆之间的距离落入的目标距离区间;基于目标相机与目标车辆之间的距离落在目标距离区间时相对于目标距离区间的预设位置的偏移量,确定目标相机与目标车辆之间的距离。
11、在一种可能的实现方式中,确定目标相机与目标车辆之间的距离,包括:拍摄目标车辆的目标图像,将目标图像输入至测距模型,得到目标相机与目标车辆之间的距离,测距模型用于基于目标相机的拍摄图像输出图像上的车辆与目标相机之间的真实距离。
12、在一种可能的实现方式中,该方法还包括:获取多张样本图像,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离;将多张样本图像输入至预设模型,得到每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,以及样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量;基于每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度、样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离,对预设模型进行训练,得到测距模型。
13、在一种可能的实现方式中,基于每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度、样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离,对预设模型进行训练,得到测距模型,包括:获取每张样本图像对应的样本图像中车辆与目标相机之间的真实距离落入的距离区间的预设置信度;对于每张样本图像,基于样本图像中车辆与目标相机之间的真实距离落入的距离区间的预设置信度,以及样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,通过交叉熵损失函数以及均方差损失函数确定置信度损失;基于样本图像中车辆与目标相机之间的真实距离,以及样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量,通过均方差损失函数确定偏移量损失;基于置信度损失,以及偏移量损失,对预设模型进行训练,得到测距模型。
14、在一种可能的实现方式中,预设模型包括卷积神经网络模块以及距离预测模块,距离预测模块具有2n个通道,n为正整数;将多张样本图像输入至预设模型,得到每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,以及样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量,包括:将多张样本图像输入至预设模型,对于每张样本图像,通过卷积神经网络模块将样本图像划分为多个图像块;对于每个图像块,通过距离预测模块的2n个通道确定图像块对应的2n个元素,其中n个元素为与n个距离区间一一对应的置信度,其余n个元素为与n个置信度一一对应的偏移量,置信度用于指示图像块表征的位置与目标相机之间的距离落在距离区间的可信程度,偏移量用于指示图像块表征的位置与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的偏移量;将多个图像块中用于表征目标车辆的位置的目标图像块对应的n个置信度中的最大值,确定为样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,将预测置信度对应的偏移量确定为样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量。
15、在一种可能的实现方式中,目标参考点为目标轮轴;该方法还包括:确定目标轮轴的运动方向;若在目标相机的拍摄图像中目标轮轴的运动方向改变,指示目标相机停止输出目标车辆的长度。
16、在一种可能的实现方式中,基于目标相机与目标车辆之间的距离,以及目标相机的视场角,确定目标相机拍摄图像中像素距离与实际距离之间的比例关系,包括:获取目标相机拍摄图像的宽度;基于目标相机与目标车辆之间的距离,以及目标相机的视场角,确定目标相机拍摄图像的宽度对应的实际距离;基于目标相机拍摄图像的宽度,以及目标相机拍摄图像的宽度对应的实际距离,确定目标相机拍摄图像中像素距离与实际距离之间的比例关系。
17、第二方面,本技术实施例提供了一种测距模型训练方法,包括:
18、获取多张样本图像,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离;
19、将多张样本图像输入至预设模型,得到每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,以及样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量;
20、基于每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度、样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离,对预设模型进行训练,得到测距模型。
21、第三方面,本技术实施例提供了一种车长确定装置,包括处理模块;
22、该处理模块,用于:
23、检测到目标车辆驶入目标相机的拍摄范围时,确定目标相机与目标车辆之间的距离;
24、基于目标相机与目标车辆之间的距离,以及目标相机的视场角,确定目标相机的拍摄图像中像素距离与实际距离之间的比例关系;
25、确定第一时刻时目标车辆的目标参考点在目标相机的拍摄图像中的位置,与第二时刻时目标参考点在目标相机的拍摄图像中的位置之间的目标像素距离;
26、基于目标像素距离、目标相机拍摄图像中像素距离与实际距离之间的比例关系、第一时刻以及第二时刻,确定目标车辆的平均速度;
27、确定目标车辆的车头通过目标相机拍摄图像中的目标位置与车尾通过目标位置之间经历的时长,并基于目标车辆通过目标相机拍摄图像中目标位置的时长,以及目标车辆的平均速度,确定目标车辆的长度。
28、在一种可能的实现方式中,处理模块具体用于:确定预设数量个距离区间;确定目标相机与目标车辆之间的距离落在各个距离区间的置信度,以及与每个置信度一一对应的偏移量;置信度用于指示目标相机与目标车辆之间的距离落在距离区间的可信程度,偏移量用于指示目标相机与目标车辆之间的距离落在距离区间时相对于距离区间的预设位置的偏移量;将最大的置信度指示的距离区间确定为目标相机与目标车辆之间的距离落入的目标距离区间;基于目标相机与目标车辆之间的距离落在目标距离区间时相对于目标距离区间的预设位置的偏移量,确定目标相机与目标车辆之间的距离。
29、在一种可能的实现方式中,处理模块具体用于,拍摄目标车辆的目标图像,将目标图像输入至测距模型,得到目标相机与目标车辆之间的距离,测距模型用于基于目标相机的拍摄图像输出图像上的车辆与目标相机之间的真实距离。
30、在一种可能的实现方式中,车长确定装置还包括获取模块,用于获取多张样本图像,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离;处理模块还用于:将多张样本图像输入至预设模型,得到每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,以及样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量;基于每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度、样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离,对预设模型进行训练,得到测距模型。
31、在一种可能的实现方式中,获取模块还用于,获取每张样本图像对应的样本图像中车辆与目标相机之间的真实距离落入的距离区间的预设置信度;处理模块具体用于:处理模块具体用于:对于每张样本图像,基于样本图像中车辆与目标相机之间的真实距离落入的距离区间的预设置信度,以及样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,通过交叉熵损失函数以及均方差损失函数确定置信度损失;基于样本图像中车辆与目标相机之间的真实距离,以及样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量,通过均方差损失函数确定偏移量损失;基于置信度损失,以及偏移量损失,对预设模型进行训练,得到测距模型。
32、在一种可能的实现方式中,预设模型包括卷积神经网络模块以及距离预测模块,距离预测模块具有2n个通道,n为正整数;处理模块具体用于:将多张样本图像输入至预设模型,对于每张样本图像,通过卷积神经网络模块将样本图像划分为多个图像块;对于每个图像块,通过距离预测模块的2n个通道确定图像块对应的2n个元素,其中n个元素为与n个距离区间一一对应的置信度,其余n个元素为与n个置信度一一对应的偏移量,置信度用于指示图像块表征的位置与目标相机之间的距离落在距离区间的可信程度,偏移量用于指示图像块表征的位置与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的偏移量;将多个图像块中用于表征目标车辆的位置的目标图像块对应的n个置信度中的最大值,确定为样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,将预测置信度对应的偏移量确定为样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量。
33、在一种可能的实现方式中,目标参考点为目标轮轴;处理模块还用于:确定目标轮轴的运动方向;若在目标相机的拍摄图像中目标轮轴的运动方向改变,指示目标相机停止输出目标车辆的长度。
34、在一种可能的实现方式中,获取模块还用于,获取目标相机拍摄图像的宽度;处理模块具体用于:基于目标相机与目标车辆之间的距离,以及目标相机的视场角,确定目标相机拍摄图像的宽度对应的实际距离;基于目标相机拍摄图像的宽度,以及目标相机拍摄图像的宽度对应的实际距离,确定目标相机拍摄图像中像素距离与实际距离之间的比例关系。
35、第四方面,本技术实施例提供了一种测距模型训练装置,包括:
36、获取模块,用于获取多张样本图像,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离;
37、处理模块,用于将多张样本图像输入至预设模型,得到每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度,以及样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量;
38、处理模块还用于,基于每张样本图像对应的样本图像中车辆与目标相机之间的距离落入的距离区间的预测置信度、样本图像中车辆与目标相机之间的距离落在距离区间时相对于距离区间的预设位置的预测偏移量,以及每张样本图像对应的样本图像中车辆与目标相机之间的真实距离,对预设模型进行训练,得到测距模型。
39、第五方面,本技术提供一种电子设备,包括:摄像头,用于拍摄目标车辆;一个或多个处理器;一个或多个存储器;其中,一个或多个存储器用于存储计算机程序代码,计算机程序代码包括计算机指令,当一个或多个处理器执行计算机指令时,电子设备执行上述第一方面所提供的任一种车长确定方法,或者,电子设备执行上述第二方面所提供的任一种测距模型训练方法。
40、第六方面,本技术提供一种计算机可读存储介质,计算机可读存储介质存储有计算机执行指令,当计算机执行指令在计算机上运行时,使得计算机执行上述第一方面所提供的任一种车长确定方法,或者,计算机执行上述第二方面所提供的任一种测距模型训练方法。
41、第七方面,本技术提供一种计算机程序产品,该计算机程序产品包括计算机指令,当计算机指令在电子设备上运行时,使得电子设备执行上述第一方面所提供的任一种车长确定方法,或者,计算机执行上述第二方面所提供的任一种测距模型训练方法。
42、本技术中第二方面到第七方面及其各种实现方式的具体描述,可以参考第一方面及其各种实现方式中的详细描述;并且,第二方面到第七方面及其各种实现方式的有益效果,可以参考第一方面及其各种实现方式中的有益效果分析,此处不再赘述。
43、本技术的这些方面或其他方面在以下的描述中会更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!