一种基于MWorks的船舶自动驾驶仿真系统及方法
本发明涉及一种基于mworks的船舶自动驾驶仿真系统及方法,属于船舶自动驾驶。
背景技术:
1、近年来,随着科技的飞速发展以及人们对海洋认识的不断深入,各国逐渐意识到海洋资源对于社会发展不可替代的作用,海洋经济成为发展新的增长点。然而,在运营成本增长、船舶操作复杂、保护法规日趋严格的背景下,以船舶制造业和船舶航运业为代表的传统行业需求低迷,船舶的智能化已然成为船舶制造和航运业进一步发展的大势所趋,而船舶自动驾驶仿真系统可辅助船舶智能化的研究,提高研究效率、降低研究成本并有效规避风险。
2、目前,与本发明相关的专利大致分为两类:1)专注于路径规划算法,而未考虑实际实施过程中可能涉及的具体细节,未对船舶所处环境及状态进行模拟。例如“基于聚类处理和人工势场的船舶路径规划方法和装置”(cn112650237a),该系统生成栅格地图,通过ais历史报文获取船舶行驶过程中的相关信息并进行聚类处理,得到满足预设条件的通行线路的汇聚点,进而通过人工势场算法构造奖励惩罚函数、模型训练,使用训练好的模型进行路径规划。与本发明进行路径规划时使用的方法不同。2)另外一类,主要是对船舶仿真系统进行设计,侧重于航行过程中具体实施细节,模拟环境往往需要手动搭建,主观性较强且环境简单,不利于将该系统应用在实际水域。例如“一种船舶仿真方法及系统”
3、(cn106777777a),主要是求得最优六自由度参数,从而提高了船舶仿真的计算精度,不涉及本发明中的路径规划方法以及环境模拟部分。
技术实现思路
1、本发明为了解决现有技术存在的问题,提出了一种基于mworks的船舶自动驾驶仿真系统及方法。
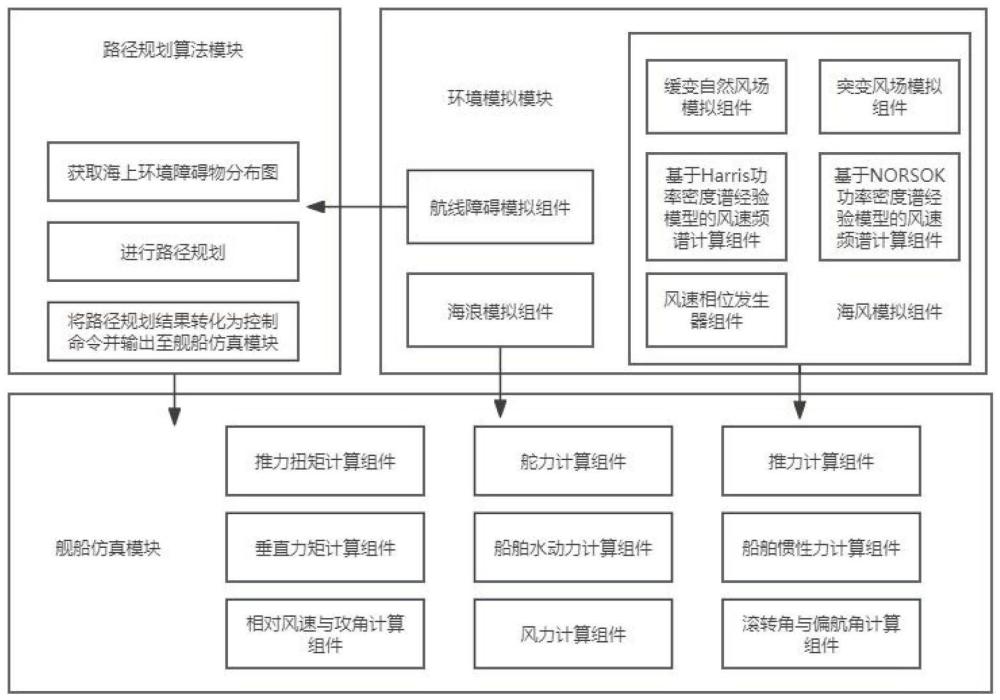
2、一种基于mworks的船舶自动驾驶仿真系统,所述基于mworks的船舶自动驾驶仿真系统包括路径规划算法模块、环境模拟模块和舰船仿真模块,所述环境模拟模块、路径规划算法模块和舰船仿真模块依次连接,且所述环境模拟模块和舰船仿真模块连接。
3、进一步的,所述路径规划算法模块,用于获取所述环境模拟模块提供的海上环境障碍物分布数据,设定起点、终点,通过改进的快速随机搜索树算法与禁忌搜索算法相结合进行路径规划,生成导航路径,并将生成的导航路径的结果转化为控制指令输送给舰船仿真模块;
4、环境模拟模块,用于使用mworks模拟船舶在不同海况条件下运行时所遇到的各种环境因素,并将模拟出的环境因素数据发送至舰船仿真模块,所述各种环境因素包括海上环境障碍物分布数据、海风环境数据和海浪环境数据;
5、舰船仿真模块,用于通过mworks模拟船舶的运动和控制行为,接收路径规划算法模块提供的指定的导航路径和环境模拟模块提供的海风环境数据和海浪环境数据,并计算船舶在不同条件下各种力的影响,基于船舶动力学和控制原理,模拟船舶在给定路径下的运动轨迹和姿态变化,并将仿真结果输出分析,提供准确的船舶自动驾驶仿真结果。
6、进一步的,所述路径规划算法模块包括可行路径生成组件和路径优化组件,所述可行路径生成组件与路径优化组件连接,其中,
7、所述可行路径生成组件,用于通过改进的快速随机搜索树算法,在考虑环境复杂度、动态目标偏置和动态步长的情况下,快速生成一条初步的可行路径;
8、所述路径优化组件,用于对所述初步的可行路径进行进一步的优化,利用禁忌搜索算法进行路径的剪枝操作,以及评估路径质量并连接路径片段,确保最终路径的质量、安全性和有效性。
9、进一步的,所述环境模拟模块包括航线障碍模拟组件、海风模拟组件和海浪模拟组件,所述航线障碍模拟组件、海风模拟组件和海浪模拟组件依次连接,其中,
10、所述航线障碍模拟组件,用于通过随机生成法或根据实际海图获取海上环境障碍物分布图,并将结果输出至所述路径规划算法模块以用于路径规划;
11、所述海风模拟组件,用于通过模拟海面上的气体分子运动来模拟海面风速,在模拟过程中,人为输入风速、风向和频率,通过分析海面缓慢变化风场,突变风场,以及随机阵风变化对于主流风场的影响,最终生成实时变化的实际风场,进一步将其转化为海风对船舶的影响,并将所述海风对船舶的影响的数据输送至所述舰船仿真模块,所述海风对船舶的影响包括船舶姿态角的变化;
12、进一步的,所述舰船仿真模块包括推力扭矩计算组件、舵力计算组件、推力计算组件、垂直力矩计算组件、船舶水动力计算组件、相对风速与攻角计算组件、风力计算组件和滚转角与偏航角计算组件,其中,
13、推力扭矩计算组件,用于计算船舶当前状态的航向力和船舶的侧向力矩(扭矩);
14、舵力计算组件,用于计算船舶四自由度力;推力计算组件用于计算船舶受到的推力矢量;
15、垂直力矩计算组件,用于计算船体在不同状态下的垂直力矩;
16、船舶水动力计算组件,用于计算船舶在水中运动时所受到的各种水动力;
17、船舶惯性力计算组件,用于计算船舶在运动时由惯性和稳定性力所产生的力矩和力的大小;
18、相对风速与攻角计算组件,用于计算相对风速和攻角;
19、风力计算组件,用于通过相对风速和攻角计算出船舶所受四自由度力;
20、滚转角与偏航角计算组件,用于根据前面组件计算出的四自由度力,对船舶的滚转角和偏航角进行实时的计算和更新。
21、一种基于mworks的船舶自动驾驶仿真方法,基于上述的一种基于mworks的船舶自动驾驶仿真系统,所述基于mworks的船舶自动驾驶仿真方法包括以下步骤:
22、s1、使用mworks模拟船舶在不同海况条件下运行时所遇到的各种环境因素,生成环境因素数据,所述环境因素数据包括海上环境障碍物分布数据、海风环境数据和海浪环境数据;
23、s2、获取海上环境障碍物分布数据,设定起点、终点,通过改进的快速随机搜索树算法与禁忌搜索算法相结合进行路径规划,生成导航路径,并将生成的导航路径的结果转化为控制指令;
24、s3、通过mworks模拟船舶的运动和控制行为,接收所述控制指令、海风环境数据和海浪环境数据,并计算船舶在不同条件下各种力的影响,基于船舶动力学和控制原理,模拟船舶在给定路径下的运动轨迹和姿态变化,并将仿真结果输出分析,提供准确的船舶自动驾驶仿真结果。
25、进一步的,在s1中,包括以下步骤:
26、s11、通过随机生成法或根据实际海图获取海上环境障碍物分布数据,所述海上环境障碍物分布数据用于路径规划;
27、s12、通过模拟海面上的气体分子运动来模拟海面风速,得到海风环境数据,在模拟过程中,人为输入风速、风向和频率,通过分析海面缓慢变化风场、突变风场以及随机阵风变化对于主流风场的影响,最终生成实时变化的实际风场,进一步将其转化为海风对船舶的影响,所述海风对船舶的影响包括船舶姿态角的变化;
28、s13、通过对自然海流建模获取海流速度和海流方向,得到海浪环境数据,在仿真中,将自然海流建模为一个随机向量场,其中包括每个时间步长内海流速度和方向的变化;在每个时间步长内,使用随机漫步模型来计算海流的速度和方向,然后将其添加到船舶的速度和方向上,以模拟船舶在自然海流中的运动。
29、进一步的,在s2中,包括以下步骤:
30、s21、由改进的快速随机搜索树算法生成可行路径;
31、s22、在该可行路径的基础上,使用禁忌搜索算法对已有路径进行剪枝操作进行优化。
32、进一步的,在s21中,包括以下步骤:
33、s211、设置环境复杂度ω,即对以某节点为中心,边长为初始步长的整数倍的正方形区域进行栅格化处理,则该点的环境复杂度为
34、ω=n_obs/n
35、其中,n为该正方形区域的栅格总数;n_obs为该区域中障碍物所占栅格个数;
36、s212、引入目标偏置思想,且改进为动态目标偏置阈值δ,即
37、δ=(1-ω)*δ
38、式中,δ为初始目标偏置阈值,ω为当前距离终点最近的点的环境复杂度,随机生成0-1之间的随机数,当随机数大于δ时,在全局随机采样生成采样点,否则将终点作为采样点。;s213、动态设置步长l,
39、l=(1-ω)*l
40、式中,l为初始设定步长,ω为当前距离当前采样点最近的点的环境复杂度,实现周围障碍物较多时,缩小步长,从而快速搜索到终点。
41、进一步的,在s22中,包括以下步骤:
42、s221、将改进的快速随机搜索树算法生成的可行路径作为初始路径,初始化禁忌表为空;
43、s222、进行禁忌搜索迭代,每次迭代中,随机选择一个节点并尝试删除,生成新的路径片段,对新的路径片段计算目标函数的值,根据目标函数的值,作出以下判断:若该路径片段在禁忌表中,则选择下一个结点进行操作;若该路径片段不在禁忌表中,将当前删除节点的路径片段添加到禁忌表中,以记录已搜索的删除操作,重复s222,直到满足停止条件,得到优化后的路径片段集合;
44、s223、遍历路径片段集合,将相邻的路径片段连接在一起形成完整路径,并确保完整路径不经过障碍物;
45、在所述禁忌搜索算法中:
46、所述禁忌表用于记录已经搜索过的删除节点的路径片段;
47、使用目标函数f(xi)来评估路径的质量,其中
48、f(xi)=(ρ*d(xi)+η*s(xi))*γ
49、式中,d(xi)为距离函数,由各节点间欧式距离相加所得,ρ为距离函数的对应系数;s(xi)为路径平滑度函数,由各航迹端间夹角度数的绝对值相加所得,η为路径平滑度函数的对应系数;γ为路径安全系数,若当前路径经过障碍物,则γ为0,否则为γ为1;
50、所述停止条件,为达到一定迭代次数或连续若干次迭代目标函数值未改善。
51、本发明的有益效果:1)可以方便地进行模型的建立和仿真实验的设计,而无需搭建在实际水域中进行测试,降低成本;2)采用改进的快速随机搜索树算法进行路径规划,适用于复杂海面环境下的路径规划问题,且避免了传统快速随机搜索树算法采样随机、冗余点较多的问题;3)可以自动搭建模拟环境,仿真不同环境下对船舶的自动驾驶控制,满足多样化任务需求。
- 还没有人留言评论。精彩留言会获得点赞!