一种血管内超声图像的血管内膜自动识别方法与流程
本发明属于血管内超声图像处理分析领域,特别涉及一种血管内超声图像的血管内膜自动识别方法。
背景技术:
1、血管内超声图像中血管内膜识别常用方法有三种:
2、(1)基于统计学的血管内膜识别方法,其主要是通过对血管内超声图像的灰度进行统计建模,以实现血管内膜边缘的识别。但建模的精度容易受到图像中的导丝伪影,组织钙化等复杂特征的影响。
3、(2)基于深度学习模型的血管内膜识别方法,需要建立复杂的深度学习模型,并且需要进行大量的数据标记,在实际运用中受到较多限制。
4、(3)基于活动轮廓模型算法的血管内膜识别方法,首先需要建立和求解复杂的能量泛函方程,求解过程繁琐;其次,利用活动轮廓模型识别血管内膜,需要给定初始轮廓。现有初始轮廓提取方法中,有一类方法是对超声图像进行聚类分割,并提取符合条件的闭合区域,再对区域进行极坐标展开,结合插值算法,将原本可能断开的边缘转换为闭合的曲线,作为初始轮廓。
5、在利用活动轮廓模型进行血管内膜识别的方法中,通过基于聚类的方法提取初始轮廓的做法存在如下不足:(1)当图像中血管内膜组织对应的灰度值与血液区域对应的灰度值接近且附近存在血管中膜边缘时,聚类方法容易将血管中膜边缘识别为血管内膜边缘;(2)聚类分割需要对多个聚类参数进行反复调试,以获取理想的分割结果;(3)在血管内超声图像中,当真实的血管内膜边缘对应的像素区域附近存在灰度值接近的非内膜边缘区域时,聚类方法往往难以正确对两部分区域进行分割,导致初始轮廓存在较大的误差。
6、为了克服在血管内超声图像中,真实血管内膜边缘对应的图像区域像素灰度值与周围血液对应的图像区域像素灰度值接近时,聚类方法无法进行正确的聚类的缺点,作出本发明。
技术实现思路
1、本发明提供了一种血管内超声图像的血管内膜自动识别方法,以解决至少一个上述技术问题。
2、为解决上述问题,作为本发明的一个方面,提供了一种血管内超声图像的血管内膜自动识别方法,包括以下步骤:
3、步骤1,获取血管内超声图像;
4、步骤2,在所述图像上设定扫描起始方向、扫描起点和扫描时的像素移动步长;
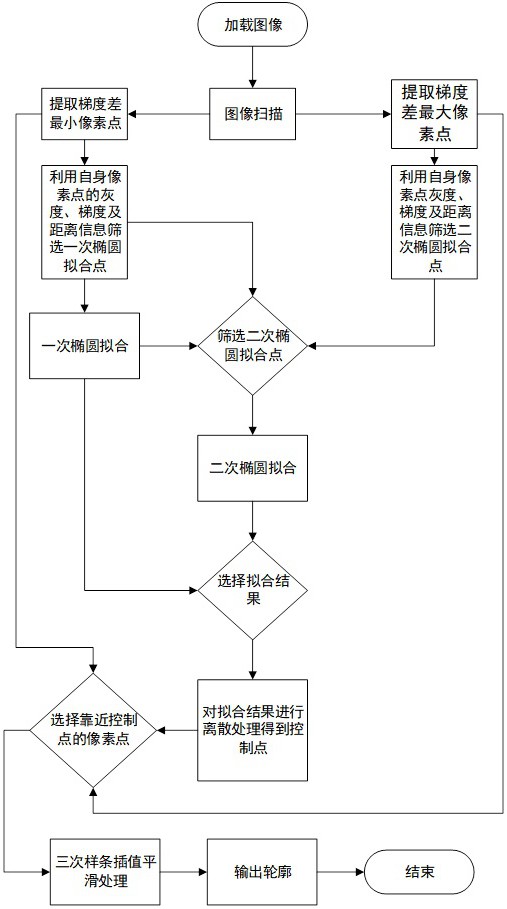
5、步骤3,从扫描起点开始、沿着扫描方向、按照设定的移动步长,搜索该扫描方向上像素灰度差值的最大值和最小值,并将其对应的像素点坐标分别记录到灰度差值最大值像素点集合maxgradpoints和灰度差值最小值像素点集合mingradpoints中;
6、步骤4,将扫描方向增加1°,重复步骤3-4,直到完成360°范围内的扫描;
7、步骤5,根据点集mingradpoints,利用随机采样一致性算法结合最小二乘法得到一次拟合椭圆;
8、步骤6,提取点集mingradpoints和maxgradpoints中与一次拟合椭圆之间最为匹配的点,构成二次拟合点集;
9、步骤7,根据二次拟合点集,利用随机采样一致性算法结合最小二乘法得到二次拟合椭圆;
10、步骤8,比较一次拟合椭圆和二次拟合椭圆的长短轴和中心点,当中心点距离差值小于指定距离、且长短轴差值小于指定长度时,选择面积较大的拟合椭圆,否则取二次拟合椭圆作为最终拟合椭圆;
11、步骤9,将最终拟合椭圆离散为360个点,提取gradpoints点集中与这360个点之间距离小于预定值的点从而得到近似于椭圆的离散点集,根据所述离散点集得到血管内膜边缘轮廓。
12、优选地,步骤5中,利用随机采样一致性算法结合最小二乘法得到一次拟合椭圆包括:
13、步骤51,从点集中随机选择预定数量的点;
14、步骤52,根据最小二乘原理计算椭圆方程,并计算椭圆对应的两焦点坐标;
15、步骤53,计算点集mingradpoints中点到两焦点的距离之和,作为点到椭圆的距离;
16、步骤54,当点到椭圆的距离满足阈值时,将该点归为内点,并计算内点个数。
17、优选地,步骤5中,利用随机采样一致性算法结合最小二乘法得到一次拟合椭圆还包括:
18、步骤55,重新从mingradpoints点集中随机选择预定数量的点,重复步骤51-步骤54,重复迭代,直到迭代次数达到设定次数;
19、步骤56,选择内点数目最多的那次迭代所对应的椭圆作为最终的一次拟合椭圆。
20、优选地,步骤7中利用随机采样一致性算法结合最小二乘法得到二次拟合椭圆的方法与步骤5中利用随机采样一致性算法结合最小二乘法得到一次拟合椭圆的方法相同。
21、优选地,步骤6中,提取点集mingradpoints中与一次拟合椭圆之间最为匹配的点,包括:计算点集mingradpoints中各点到一次拟合椭圆的距离,保留距离满足设定阈值的点,添加到二次拟合点集中。
22、优选地,步骤6中,提取点集maxgradpoints中与一次拟合椭圆之间最为匹配的点,包括:
23、步骤61, 取maxgradpoints点集中的点,计算该点在血管内超声图像中对应像素灰度值与其周围某一邻域像素点对应的灰度值之差,并计算灰度差值的绝对值均值,并计算该点到一次拟合椭圆的最近距离;
24、步骤62,设定均值阈值和距离阈值,提取同时满足均值阈值和距离阈值的点,添加到二次拟合椭圆点集中。
25、优选地,步骤9中,根据所述离散点集得到血管内膜边缘轮廓包括:指定控制点的个数,对离散点集进行均匀采样后进行三次均匀样条插值,从而输出平滑的血管内膜边缘轮廓。
26、优选地,步骤52中,根据最小二乘原理计算椭圆方程包括:
27、设任意圆心坐标和旋转角的椭圆为:,采集到多个测量点为;
28、根据最小二乘原理,取损失函数最小时作为最终拟合结果,其中,所述损失函数为:
29、
30、通过解下述方程组,得到损失函数最小时的的值,即可得到椭圆的相关参数:
31、。
32、优选地,步骤5之前还包括:
33、步骤a,计算mingradpoints集合中的每个点到该集合中其他点距离的最小值,若距离最小值超过设定值,则认为该点为孤立点,并将其从集合mingradpoints中删除;
34、步骤b,对于删除孤立点后的mingradpoints集合中的每个像素点,统计该点在超声图像上对应位置的8邻域像素灰度值分布,若该点对应的分灰度布中灰度值小于指定灰度阈值的个数小于指定个数,则保留该像素点,以尽可能保留血管内超声图像中血管内膜边缘区域的像素点。
35、优选地,步骤3中,搜索该扫描方向上像素灰度差值包括:
36、依次计算当前点和下一点在血管内超声图像中对应的像素灰度值的差;当差超过设定的阈值时,记录当前点的像素坐标,并将下一点像素坐标更新为当前点像素坐标,重复此过程,直到下一点到达图像边缘。
37、本发明通过对整幅图像360°的逐像素扫描,能从血管内超声图像中有效提取血管内膜边缘所对应的像素点,该部分像素点对应的灰度值与血管内超声图像中血液区域对应的灰度值接近;本发明中通过过滤干扰点,对剩余像素点进行曲线拟合,能在血管内超声图像中血管内膜边缘不明显的状态下,从图像中识别血管内膜边缘,有效提高血管内膜边缘的识别精度。
- 还没有人留言评论。精彩留言会获得点赞!