一种车位识别方法及装置、设备、存储介质与流程
本技术实施例涉及图像识别技术,涉及但不限于一种车位识别方法及装置、设备、存储介质。
背景技术:
1、近些年来,由于城市规模的不断扩大,大型或者超大型的停车场也在不断涌现,在上述场景中,很多时候由于车库过大过于复杂、或者车主停车后离开车时忘记记住停车位置,造成后续花费大量的时间精力去寻找停车位的位置,甚至出现无法找到自车停车位的情况,因此,需要通过对车位进行识别,获取到车位信息,以保证能够根据车位号准确的找到自车的位置。
2、在现有技术中,往往是通过数字图像处理来识别车位号,通常需要先对采集的图像进行手工特征提取,这些特征需要具备丰富的工程经验来设计,然后将提取的特征输入到分类器中进行字符识别,这种技术对车位号的识别很容易出现字符识别出错,对极端场景的覆盖性较差,导致车位号识别错误。
3、因此,如何保证车位号在极端条件下的识别准确性,减少识别系统的性能消耗,是一个亟待解决的问题。
技术实现思路
1、有鉴于此,本技术实施例提供的一种车位识别方法及装置、设备、存储介质,能够对连续多帧图像中的多个车位号进行识别,通过对多次车位号的识别,保证车位号识别的准确性。本技术实施例提供的一种车位识别方法及装置、设备、存储介质是这样实现的:
2、本技术实施例提供的一种车位识别方法,包括:
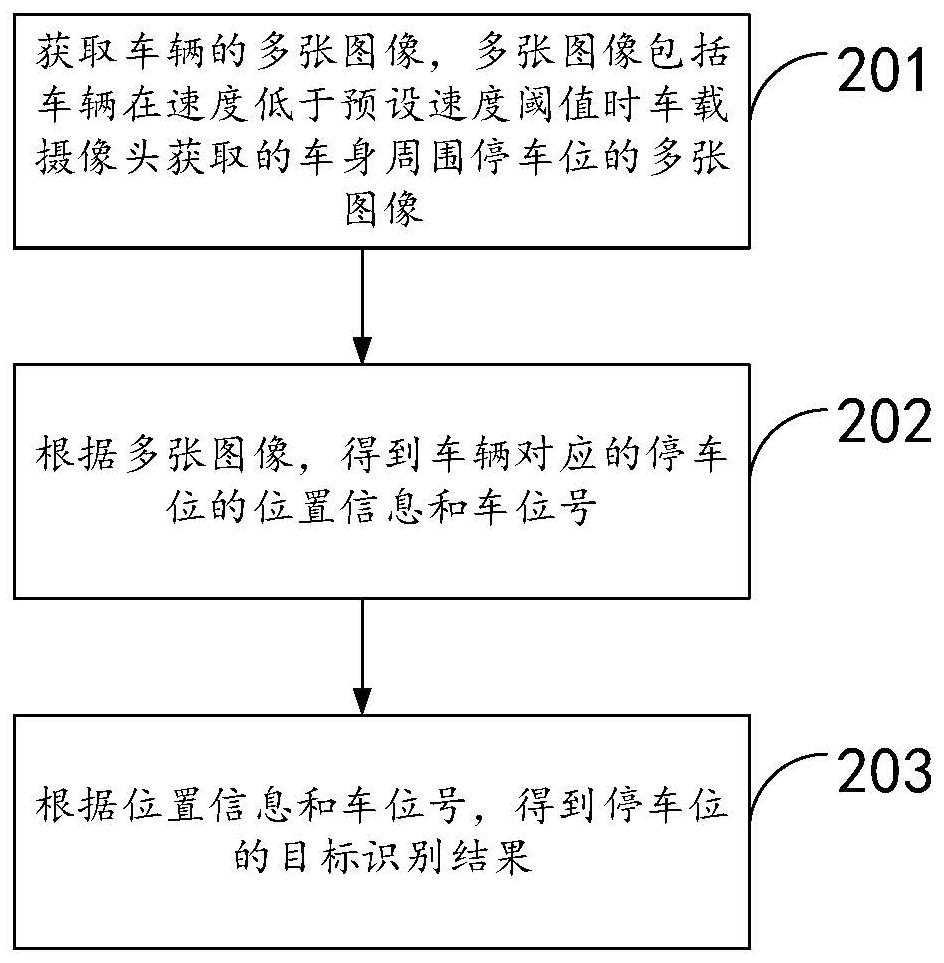
3、获取车辆的多张图像,所述多张图像包括所述车辆在速度低于预设速度阈值时车载摄像头获取的车身周围停车位的多张图像;
4、根据所述多张图像,得到所述车辆对应的停车位的位置信息和车位号;
5、根据所述位置信息和所述车位号,得到所述停车位的目标识别结果。
6、在一些实施例中,所述根据所述多张图像,得到所述车辆对应的停车位的位置信息和车位号,包括:
7、获取所述车辆的行驶数据;
8、根据所述行驶数据对所述多张图像进行位移补偿以及角度补偿,得到多张处理后的图像;
9、对所述多张处理后的图像进行特征提取,得到所述车辆对应的停车位的位置信息和车位号。
10、在一些实施例中,所述对所述多张处理后的图像进行特征提取,得到所述车辆对应的停车位的位置信息和车位号,包括:
11、将每张处理后的图像中的每个像素点的坐标由像素坐标转换成世界坐标;
12、根据所述多张处理后的图像中每张处理后的图像的各个像素点的世界坐标,得到bev图像;
13、对所述bev图像进行特征识别,得到所述车辆对应的停车位的位置信息和车位号;和/或,
14、所述对所述bev图像进行特征识别,得到所述车辆对应的停车位的位置信息和车位号,包括:
15、将所述bev图像输入到预设的特征提取网络模型,得到与所述bev图像对应的多个图像特征;
16、将所述多个图像特征分别输入到预设的停车位处理模型和预设的车位号处理模型;
17、通过所述停车位处理模型得到所述停车位的位置信息,以及,通过所述车位号处理模型得到所述车位号。
18、在一些实施例中,所述将所述bev图像输入到预设的特征提取网络模型,得到与所述bev图像对应的多个图像特征,包括:
19、对所述bev图像进行浅层特征提取处理,得到所述bev图像对应的多个图像特征的浅层特征,所述bev图像对应的多个图像特征的浅层特征包括所述bev图像对应的多个图像特征的边缘特征和纹理特征;
20、根据所述bev图像对应的多个图像特征的浅层特征进行深层特征提取处理,得到所述bev图像对应的多个图像特征的深层特征,所述深层特征包括所述bev图像对应的多个图像特征的语义特征;
21、对所述bev图像对应的多个图像特征的浅层特征和深层特征进行特征融合,得到融合后的所述bev图像对应的多个图像特征。
22、在一些实施例中,所述通过所述停车位处理模型得到所述停车位的位置信息,包括:
23、将融合后的所述bev图像对应的多个图像特征输入到所述停车位处理模型;
24、所述停车位处理模型处理融合后的所述bev图像对应的多个图像特征,识别融合后的所述bev图像对应的多个图像特征中用于表征停车位的停车位角点特征,并根据所述停车位角点特征得到所述停车位的位置信息,所述停车位处理模型是根据对历史处理的停车位角点特征以及历史位置信息进行训练得到的;和/或,
25、所述通过所述车位号处理模型得到所述车位号,包括:
26、将融合后的所述bev图像对应的多个图像特征输入到所述车位号处理模型;
27、所述车位号处理模型处理融合后的所述bev图像对应的多个图像特征,识别融合后的所述bev图像对应的多个图像特征中用于表征车位号的车位号特征,得到所述车位号特征对应的车位号,所述车位号处理模型包括文本识别模型。
28、在一些实施例中,所述车位号处理模型处理融合后的所述bev图像对应的多个图像特征,识别融合后的所述bev图像对应的多个图像特征中用于表征车位号的车位号特征,得到所述车位号特征对应的车位号,包括:
29、获取融合后的所述bev图像对应的多个图像特征中用于表征车位号的车位号特征,对所述车位号特征在融合后的所述bev图像中的区域进行处理,得到包含所述车位号特征的矩形区域;
30、对所述矩形区域中的所述车位号特征进行旋转,得到旋转后的所述车位号特征;
31、对旋转后的所述车位号特征进行特征提取,得到旋转后的所述车位号特征对应的车位号。
32、在一些实施例中,所述bev图像包括根据所述多张处理后的图像得到的所述停车位在不同时刻的多个目标bev图像,根据所述位置信息和所述车位号,得到所述停车位的目标识别结果,包括:
33、根据每个目标bev图像对应的位置信息和车位号,得到所述每个目标bev图像中停车位的识别结果和所述识别结果的置信度,所述置信度用于指示所述识别结果的准确性;
34、根据所述每个目标bev图像中停车位的识别结果和所述识别结果的置信度,对每个目标bev图像中停车位的识别结果的准确性进行检测,得到所述目标识别结果,所述目标识别结果为所述多个bev图像中停车位的识别结果的准确性最高的识别结果。
35、在一些实施例中,所述根据所述每个目标bev图像中停车位的识别结果和所述识别结果的置信度,对每个目标bev图像中停车位的识别结果的准确性进行检测,包括:
36、获取每个识别结果中的车位号在对应位置出现的概率,所述对应位置为对应的识别结果包括的位置信息对应的位置;
37、根据每个识别结果中的车位号在对应位置出现的概率、对应的识别结果的置信度以及预设权重,计算得到每个识别结果的准确性;和/或,
38、根据所述每个目标bev图像中停车位的识别结果和所述识别结果的置信度,得到所述目标识别结果前,还包括:
39、对所述目标结果的位置信息和所述目标结果的车位号进行修正,得到修正的位置信息和修正的车位号;
40、根据所述修正的位置信息和所述修正的车位号,得到所述目标识别结果。
41、在一些实施例中,所述对对所述目标结果的位置信息和所述目标结果的车位号进行修正,得到修正的位置信息和修正的车位号,包括:
42、根据所述停车位与已知的关联车位的相对位置关系,以及所述关联车位的关联位置信息,对所述位置信息进行修正,得到修正后的位置信息,所述关联车位为在所述停车位预设范围内的其他停车位;
43、根据所述停车位与已知的关联车位的相对位置关系、预设的车位号编码方式以及所述关联车位的关联车位号,对所述车位号进行修正,得到修正后的车位号。
44、本技术实施例提供的一种车位识别装置,包括:
45、获取模块,用于获取车辆的多张图像,所述多张图像包括所述车辆在速度低于预设速度阈值时车载摄像头获取的车身周围停车位的多张图像;
46、提取模块,用于根据所述多张图像,得到所述车辆对应的停车位的位置信息和车位号;
47、识别模块,用于根据所述位置信息和所述车位号,得到所述停车位的目标识别结果。
48、本技术实施例所提供的一种车位识别方法、装置、计算机设备和计算机可读存储介质,通过获取车辆的多张图像,多张图像包括车辆在速度低于预设速度阈值时车载摄像头获取的车身周围停车位的多张图像,根据多张图像,得到车辆对应的停车位的位置信息和车位号,根据位置信息和车位号,得到停车位的目标识别结果。这样,能够通过获取车辆在低速行驶时的多张图像,并根据这些图像得到车辆对应的停车位的位置信息和车位号,提供高准确性的停车位识别结果,帮助驾驶员快速找到停车位,解决背景技术中所提出的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!