面向全身PET/CT扫描的头颈肿瘤靶区的勾画系统的制作方法
本技术涉及医疗,具体而言,涉及一种面向全身pet/ct扫描的头颈肿瘤靶区的勾画系统。
背景技术:
1、头颈肿瘤是最常见的肿瘤,一般需要通过ct或者pet图像来确定肿瘤的位置,在ct图像或pet图像中勾画出gtvp和gtvn,gtvp(primary tumor):代表原发肿瘤的大体肿瘤靶体积。gtvn(lymph nodes):代表转移淋巴结的大体肿瘤靶体积。这指的是已经发生转移的淋巴结。
2、现有的技术方案中,基本上都是医生根据ct图像和pet图像,共同定位肿瘤位置,然后勾画靶区。这种勾画方式,非常耗费医生的时间,因为ct图像和pet图像,隶属于两个不同成像系统,所以医生需要繁复的切换两种系统,在两个系统上来观察肿瘤的位置,进而确定肿瘤的区域。并且ct图像和pet图像都不是一张图像,临床中会沿着头颈方向,形成多个具有一定间隔的断面图像,所以医生在pet图像和ct的图像对比时,难度很大。综上所述,现有的靶区勾画方式,因为ct设备和pet设备因为兼容程度不高,导致医生在频繁的切换ct图像和pet图像时,不能够确定两个图像之间的对应关系,所以导致了靶区勾画的工作量大,工作效率低。
技术实现思路
1、本技术的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本技术的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
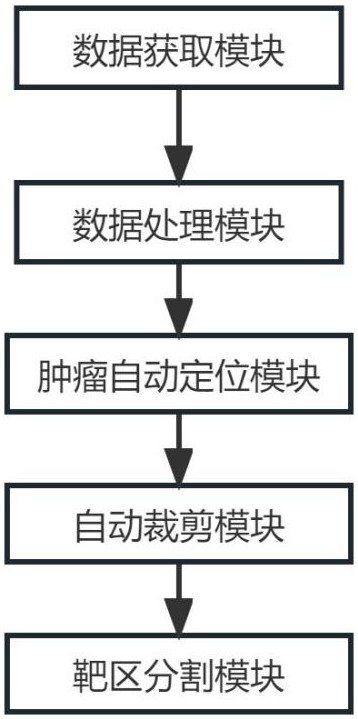
2、作为本技术的第一个方面,为了解决ct设备和pet设备因为兼容程度不高,导致医生难以高效地根据ct图像和pet图像勾画出靶区的技术问题。本技术的一些实施例中提供了一种面向全身pet/ct扫描的头颈肿瘤靶区的勾画系统,包括数据获取模块、数据处理模块、肿瘤自动定位模块、自动裁剪模块,以及靶区分割模块;数据获取模块与数据处理模块信号连接,数据处理模块与肿瘤自动定位模块信号连接,肿瘤自动定位模块与自动裁剪模块信号连接,自动裁剪模块与靶区分割模块信号连接;其中:
3、数据获取模块分别与pet设备和ct设备连接,以收集pet图像和ct图像,并将pet图像和ct图像发送给数据处理模块;
4、数据处理模块,用于将ct图像和pet图像处理为相同标准下的灰度图片,并将ct图像和pet图像进行刚性配准对齐,并将处理好的pet图像和ct图像发送至肿瘤自动定位模块;
5、肿瘤自动定位模块,内置有神经网络模型,ct图像和pet图像输入至肿瘤自动定位模块得到若干个病理区,并将病理区数据发送给自动裁剪模块,病理区数据包括病理区的空间位置信息和置信度分数;
6、自动裁剪模块,获取病理区的中心点位置,并基于不同病理区的置信度分数和空间位置信息,裁剪出包含肿瘤的pet图像和ct图像,然后发送至靶区分割模块;
7、靶区分割模块,基于深度学习网络自动构建分割系统,在pet图像或ct图像中分割出gtvp和gtvn。
8、本技术所提供的技术方案中,数据处理模块能够将pet图像和ct图像相互对准之后,然后输入至肿瘤自动定位模块中,得到对应的病理区之后,通过自动裁剪模块和靶区分割模块进行处理,进而得到对应的gtvp和gtvn。如此在本技术所提供的方案中通过人工智能技术,能够对两个系统中不同的图像进行预处理,进而自动输出医生所需要的gtvp和gtvn,医生只需要判断gtvp和gtvn的真实性,对其校验无误之后,就完成了靶区勾画工作,相比较于之前手动的靶区勾画的方式,本技术所提供的方案,靶区勾画的效率更高。
9、进一步的,数据获取模块在收集ct图像和pet图像时:
10、数据获取模块与pet设备信号连接,获取pet设备传输的pet图像,得到pm1、pm2、pm3、…pmi…pmk;其中,pmi表示第i个pet图像,k表示图像的总数;
11、数据获取模块与ct设备信号连接,获取ct设备传输的pet图像数据,得到cm1、cm2、cm3、…cmi…cmn;cmi表示第i个ct图像,n表示图像的总数;
12、数据获取模块将pm1、pm2、pm3、…pmi…pmk和cm1、cm2、cm3、…cmi…pmn发送至数据处理模块。
13、ct图像和pet图像不仅仅是隶属于两个不同的设备这么简单,在医院的实际治疗环境中,ct设备的型号和pet设备的型号并不是一定的。所以就导致了ct设备和pet设备所得到的ct图像和pet图像,在清晰度上,以及摆放方式上,并不一致,进而导致了深度学习模型,在对ct图像和pet图像进行关联分析时,因为两者之间的各区域无法一一对应,而导致无法将ct图像和pet图像进行准确的关联处理,针对这一问题,本技术提供如下技术方案:
14、进一步的,数据处理模块包括图像配准单元、网格插值单元,以及归一化单元,图像配准单元用于ct图像和pet图像的配准,网格插值单元用于处理pet图像和ct图像,使得两者具有相同规格的最小像素网格点区域;归一化单元用于对pet图像的像素和ct图像的像素进行归一化处理;
15、归一化的公式为:
16、norm(x)=x-mean(x)/std(x) ;其中,
17、norm表示归一化操作;
18、x表示待归一化的数组;
19、mean(x)表示取x的均值;
20、std(x)表示取x的标准差。
21、本技术所提供的技术方案中,通过设置了图像配准单元和网格差值单元,能够将pet图像和ct图像进行刚性对准,进而使得pet图像和ct图像能够在每个区域都相互对应,然后再利用网格插值单元,使得pet图像和ct图像的每个最小像素网格点区域都能够对应,同时针对pet图像和ct图像在图像识别特征上的差异,还进行了归一化处理,使得不同患者在不同扫描设备下完成的pet图像和ct图像能够在同一标准下进行判断。
22、本技术所提供的技术方案中,需要采用深度学习网络模型来自动生成靶区,所以在对深度学习网络模型进行训练时,就需要提供大量的相同规格的数据,并且还需要保证深度学习网络模型在使用时,输入给深度学习网络模型的数据也是与训练时,相同规格的数据,但是目前各个医院的ct设备和pet设备型号不一,所以导致了收集到的数据不能够用于深度学习网络模型的训练,而在将其训练完成之后,也不一定能够运用。针对这一问题,本技术提供如下技术方案:
23、图像配准单元将收集到的所有pet图像和ct图像都进行刚性配准,刚性配准的方法为:y=tx, 其中x为原始图像数组,y为配准后的图像数组,t为刚性变换矩阵;
24、,
25、其中,表示原始图像数组的旋转角度,d=(x,y)表示原始图像需要平移的距离。
26、在本技术所提供的技术方案中,将收集到的pet图像和ct图像都进行了刚性对准,进而对于不同患者的ct(或pet图像)图像,进行统一,以消除不同ct设备或pet设备带来的成像差异。
27、ct图像和pet图像一般都具有很多层图像,如果将这些图像都输入到深度学习网络模型中,则会导致深度学习网络模型的计算量大,而如果通过抽取的方式,抽出任意数量的图像输入到深度学习网络模型中,则会导致丢失过多的特征,而使得深度学习网络的精度不高,无法得到准确的预测结果。针对这一问题,本技术提供如下技术方案:
28、网格插值单元在进行插值时,确定最小像素网格点区域a×b×c,将多层pet图像和多层ct图像均划分为若干个最小像素网格点区域;然后,用线性插值法对每个最小像素网格点区域进行填充;线性插值的计算公式如下:
29、,
30、其中y(r)为待插值获得的图像在最小像素网格点区域r处的像素值,y(r0)、y(r1)为已知的图像在最小像素网格点区域r0、r1处的像素值,a表示最小像素格网格区域的x方向长度,b表示最小像素格网格区域的y方向长度,c表示最小像素格网格区域的z方向长度。
31、本方案中,采用线性插值单元进行填充时,每个最小像素点的像素值是以三维数据来计算并得到的,所以在对数据进行压缩的基础上,还能够避免因为直接抽取图像特征所导致的关键信息丢失,保证了深度学习网络模型的精度。
32、进一步的,a=2mm,b=2mm,c=3mm。
33、本方案中,最小像素网格点区域的像素值在通过线性差值来进行填充时,分别在x、y、z三个方向上,用a=2mm,b=2mm,c=3mm的区域进行线性差值,所以能够极大的减少计算量,同时该范围也基本上是肉眼识别能力的极限,所以深度神经网络模型,在该标准下进行训练之后,能够最大限度的接近医生的勾画的靶区。
34、pet图像因为不同的设备,其在每个像素格中的像素值,不仅仅有正数,还具有负数。这是pet图像所具有的特殊特征。所以,如果直接对pet进行归一化处理,不仅仅会出现负数,还会因为一些特殊的异常值的影响,导致归一化的结果,并不准确,进而影响深度学习模型,使得最终得到的靶区勾画并不准确。针对这一问题,本技术提供如下技术方案:
35、进一步的,在对pet图像进行归一化处理之前,需要对数据进行预处理,预处理方式如下:
36、步骤1:pet图像中每个最小像素网格点区域内的像素值减去所有最小像素网格点区域中像素值的最小值;
37、步骤2,设置最大阈值,然后将超过最大阈值的像素值直接设置为最大值。
38、本技术所提供的技术方案中,通过步骤1,使得pet图像中每个最小像素网格点区域的像素值,减去所有最小像素网格点区域中像素值的最小值,所以使得每个最小像素网格点区域并不会具有负数,然后设置了最大阈值之后,能够避免几个较大的最小像素网格点区域的像素值对于后续归一化的影响。
39、进一步的,肿瘤自动定位模块内置的神经网络模型为目标识别定位深度学习网络模型;肿瘤自动定位模块对输入的pet图像和ct图像进行分析,输出包含肿瘤目标的病理区,并计算出对应病理区的病理区数据。
40、进一步的,自动裁剪模块,用于对获取的病理区数据进行优化,过滤掉多余的信息。
41、进一步的,以自动裁剪模块处理后的pet、ct图像为输入,基于4层双通道unet网络完成肿瘤目标自动分割。
- 还没有人留言评论。精彩留言会获得点赞!