一种基于维纳滤波的线光谱共焦图像光斑混叠消除方法与流程
本发明涉及精密光学测量,尤其涉及一种基于维纳滤波的线光谱共焦图像光斑混叠消除方法。
背景技术:
1、线光谱共焦传感器是精密光学测量领域近些年新兴的一种光学非接触式位移传感器,具备能够突破光学衍射极限从而实现超分辨测量的特点,被广泛应用于工业自动化领域。线光谱共焦传感器的工作原理为,将经狭缝后的理想线光源以不同波长聚焦在不同深度处,将样品表面反射回的光成像到成像光谱仪中进行分光解码并得到光谱图像数据,最后根据光谱图像数据还原被测样品的表面形貌数据。但是,由于线光谱共焦传感器自身的特点,光谱图像通常存在光斑混叠现象,即在成像过程中实际光斑比理想光斑大,邻近的光斑之间将发生部分重叠。这种光斑混叠现象将影响线光谱共焦传感器的测量精度,因此如何消除光斑混叠是一个非常重要的课题。
2、现有的线光谱共焦传感器一般直接采用谱峰提取的数据处理方法。这种处理方式为在光谱图像的每一个空间通道上,寻找光谱数据的峰值点,再根据模型和定标结果,通过得到的峰值点位置反推样品的表面形貌数据。但是,由于光斑混叠现象的存在,提取到的谱峰位置可能不是实际的位置,这将大大影响测量精度。
3、现有的图像模糊消除方法试图通过盲反卷积来实现,这是一种通用的图像还原方法。这种方法试图通过对模糊图像的频谱进行分析,确定信号环境的传递函数,再通过反卷积恢复原始数据,消除图像模糊。例如,公开号为cn116309190b、名称为“一种基于最佳区域中值先验的湍流退化图像恢复方法”的发明专利,先根据目标湍流退化图像的梯度信息和盲反卷积模型,得到目标点扩散函数,在对目标湍流退化图像进行盲反卷积处理,实现图像恢复。但是这种处理方法不仅复杂,是高强度的计算技术,并且仅依靠对图像数据频谱的分析,其最终效果仍有待提升。
技术实现思路
1、本发明针对现有技术的不足,提出了一种基于维纳滤波的线光谱共焦图像光斑混叠消除方法。
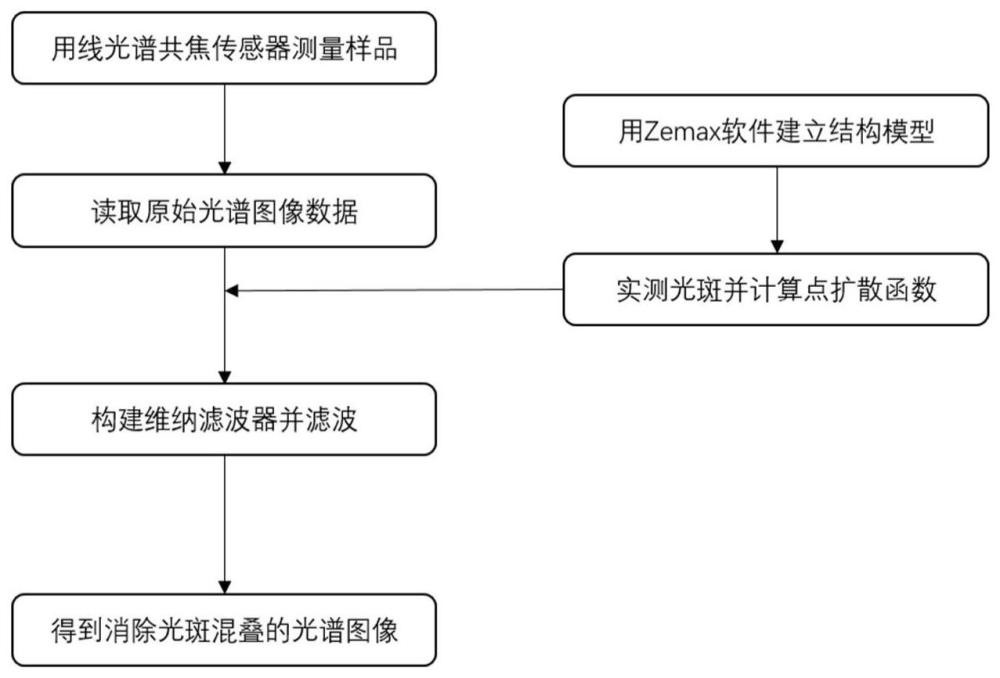
2、本发明是通过下述技术方案实现的,包括五个步骤,具体说明如下:
3、步骤1:用线光谱传感器色散共焦的线光源照射被测样品表面,并通过线光谱共焦传感器的光谱仪分光系统收集反射光,经分光处理后聚焦到cmos传感器上;
4、步骤2:读取cmos传感器上的数据,得到以像素点呈现的线光谱共焦传感器原始光谱图像数据i(x,y),式中x,y为像素坐标。
5、步骤3:将被测样品换成具有小截面面积的探针,探针与被测样品上的一个光斑半径相差0-7.5μm,探针固定在精密位移平台上,通过调整探针水平位置和高度,在cmos传感器上得到n*m个平均分布的无混叠光斑,对应在n个横向探针位置上各取m个纵向探针高度;
6、步骤4:对n*m个无混叠光斑,读取其附近的n*m组cmos像素数据,得到各光斑的实测点扩散函数hi(x,y);
7、步骤5:将cmos传感器平面划分为p*q个区域,并计算得到各区域上实测的基于像素坐标的点扩散函数h(x,y);
8、步骤:6:基于步骤2所述原始光谱图像数据和实测得到的p*q个点扩散函数,在划分出的p*q个区域中,对每个区域先进行扩充,形成互有重叠l列和行的p*q个区域,对这些区域分别构建改进的维纳滤波器,并进行维纳滤波,获得p*q个消除光斑混叠后的线光谱共焦传感器光谱图像;
9、所述构建改进的维纳滤波器,进行维纳滤波,具体过程包括:
10、步骤6-1:构建维纳滤波器,在频域上进行一次近似估计,表达公式如下:
11、
12、其中,h(u,v)为点扩散函数的频谱,h*(u,v)为其复共轭,∈为某个设定的经验值,i(u,v)为带噪光谱数据的频谱,为近似估计图像的频谱。对进行逆傅里叶变换,可以得到图像在时域上的一个估计
13、步骤:6-2:构建改进的维纳滤波器(modified wiener filter),表达公式如下:
14、
15、其中,h*(u,v)为点扩散函数的频谱函数复共轭,h(u,v)为点扩散函数的频谱,i(u,v)为带噪光谱数据的频谱,o(u,v)为原始光谱数据的频谱,是噪声均方值,so(u,v)为从步骤6-1中估计的的功率谱密度频谱。的估计方法表达公式为:
16、
17、其中,m和n分别是图像的宽和高,i(x,y)为带噪声的光谱数据,为从步骤6-1中得到的原始图像的一个估计,h(x,y)为点扩散函数。对o(u,v)进行逆傅里叶变换,得到消除光斑混叠的线光谱共焦传感器光谱图像,以此有效提升线光谱共焦传感器的横纵向测量分辨率。
18、步骤7:对p*q个处理后得到的光谱图像重叠区域进行加权融合拼接以消除滤波边界的影响。
19、进一步的,步骤3所述的通过调整光斑水平位置和高度,在cmos传感器上得到n*m个平均分布的互相不发生混叠的光斑,具体内容为:
20、被测探针经线光谱传感器测量后,在cmos传感器上被成像为一个无混叠光斑,通过调整探针的位置和高度,在cmos传感器上不同位置取共计n*m个光斑,其中n表示在所用线光谱传感器的横向测量范围内等距地取n个位置,m表示在所用线光谱传感器的纵向测量范围内等距地取m个高度。
21、进一步的,步骤5所述的将cmos传感器平面划分为p*q个区域,并计算得到各区域上实测的基于像素坐标的点扩散函数h(x,y),具体过程包括:
22、步骤5-1:考虑到cmos传感器上不同位置的光斑点扩散函数有所不同,将cmos传感器平面平均划分为p*q个区域,其中p表示将所用cmos传感器平面在横向等距地划分为p个区域,q表示将所用cmos传感器平面在纵向等距地划分为q个区域;
23、步骤5-2:在每个被划分出的区域中,对落在该区域中的r个光斑,根据步骤4所述的点扩散函数hi(n,m),在对应像素上求和取均值,得到该区域中实测的基于像素坐标的点扩散函数h(x,y),即
24、进一步的,步骤7所述加权融合拼接,具体过程包括:
25、对于相邻图像的重叠区域内一像素点,其值计算方法为:
26、
27、其中,p1为像素点在相邻图像左侧图或上侧图中的值,p2为像素点在相邻图像右侧图或下侧图中的值,p为重叠区域融合后的值,l表示重叠区域中某一像素点距离重叠区域最右侧或最下侧边界线的距离,l表示重叠区域的宽度且取决于光斑的大小。由于重叠区域内像素点同时受到两个点扩散函数的影响,利用该方法,可以使重叠区域内的像素点实现较好的还原。
28、作为优选,所述的小截面面积的探针,其半径大小为5-20μm。
29、本发明的有益效果为:
30、(1)线光谱传感器的光斑混叠现象远比点光谱传感器严重,消除光斑混叠后的图像相比原始光谱数据图像,更接近真实数据,有助于提高线光谱共焦传感器在横向和轴向两个维度上的测量精度。
31、(2)基于点扩散函数和维纳滤波的方法,相比基于频谱分析的盲反卷积方法,不仅不需要对原始光谱图像数据进行大量分析计算,简化了算法,而且消除光斑混叠的效果更好,更加还原理想光谱图像。
32、(3)基于点扩散函数和维纳滤波的方法,相比基于频谱分析的盲反卷积方法,在难以估计的成像场景中,如样本稀疏或有明显周期性的情况下,由于不依赖对频谱的分析,仍可很好地完成消除光斑混叠现象。
33、(4)基于实测得到点扩散函数的方法,更符合真实使用的线光谱共焦传感器系统,因此具有良好的光斑混叠消除效果,且在不同成像位置取样的方法,考虑了不同位置像差略有差异的特点。
- 还没有人留言评论。精彩留言会获得点赞!