平面内非合作目标的位姿确定方法和装置
本公开涉及空间位姿识别,尤其涉及一种平面内非合作目标的位姿确定方法、装置、存储介质及电子设备。
背景技术:
1、目标物体的位置和姿态参数一直是智能驾驶、航空航天、工业制造以及人工智能等领域重点,随着各个领域的飞速发展,在航天航空领域关于航天器对接,非合作的在轨卫星的服务等问题,基于视觉的目标位置与姿态的测量是图像处理问题中一个难点问题,利用图像对目标位姿进行测量广泛应用于无人驾驶、空间操作、工业制造等领域,目标位姿测量的准确度直接影响到无人驾驶的安全。
2、当前主要的位姿测量技术有基于卫星导航技术、基于惯性传感器、基于激光雷达与基于视觉等方式。较其他方式,基于视觉位姿测量技术所使用的设备简单,成本较低,安装方式多变灵活,抗干扰能力强有较强的鲁棒性。根据视觉传感器的种类可将视觉测量分为可见光视觉测量、红外光视觉测量与可见光与红外光视觉融合测量,按照视觉传感器数量分类可分为单目视觉测量、双目视觉测量以及多目视觉测量。传统的红外视觉测量虽然可以适应全天候的环境,鲁棒性较好,但高精度红外视觉测量成本较高,单目可见光视觉进行图像采集,可精确解算目标物体位姿,成本低、同时有成熟的标定方法,鲁棒性较好。
3、视觉系统对目标进行位姿测量主要分为空间合作目标与空间非合作目标。合作目标位姿测量过程中,目标特征点之间的空间约束关系已知,合作目标的位姿测量计算较为简单,提取难度较低,精度较高,限制条件较多,常用的方法有平面pnp法(perspective-n-point,n点透视)、四面体体积法、正交迭代算法等;非合作目标的位姿测量不存在合作目标位姿测量的诸多限制条件,不需要目标物体提供合作信息,相较于合作目标位姿测量,非合作目标位姿测量有更为宽泛的应用。
4、由于缺少自身三维结构的先验信息,同时对目标进行特征识别和提取有较大难度,使得对非合作目标的三维重构非常困难;对非合作目标进行位姿测量,图像匹配问题是绕不开的问题,空间环境、噪声干扰、图像畸变等影响都会产生图像误匹配问题;如何建立从三维物体到二维图像特征点对应关系问题,以上几种问题都影响着目标位姿测量的鲁棒性。因此如何提高非合作目标位姿计算的鲁棒性,提高计算精度,对目标测量有着重要作用和意义。现有的位姿计算方法可以大致分为两种:第一种方法是对目标对象进行特征提取,计算三维点到二维投影之间的对应关系,从而计算目标与相机之间的相对位置和方向[;第二种方法基于全局、迭代和非线性优化的模板匹配算法,将位姿计算简化为带坐标系的模板匹配问题,通过计算坐标系来估计位姿。传统非合作目标进行目标位姿信息获取主要采用光学手段,需要通过一定的特征检测手段提取目标表面几何特征、深度等信息。利用光学传感器进行位姿测量,依然伴随着对目标特征点进行提取,这光学传感器的分辨率提出较高的要求,理论上来说分辨率越高的传感器对目标特征点提取越精确。
5、在工业制造和无人驾驶领域多数非合作目标均为平面物体,在估计目标物体位姿时需要考虑6个自由度,但在解算过程中由于需要解算的参数量较多,导致计算难度提升,计算效率降低,无法满足特定环境下的目标快速识别。
技术实现思路
1、本公开实施例的目的在于提供一种平面内非合作目标的位姿确定方法、装置、存储介质及电子设备,用以解决现有技术中计算位姿时难度提升、计算效率低的问题。
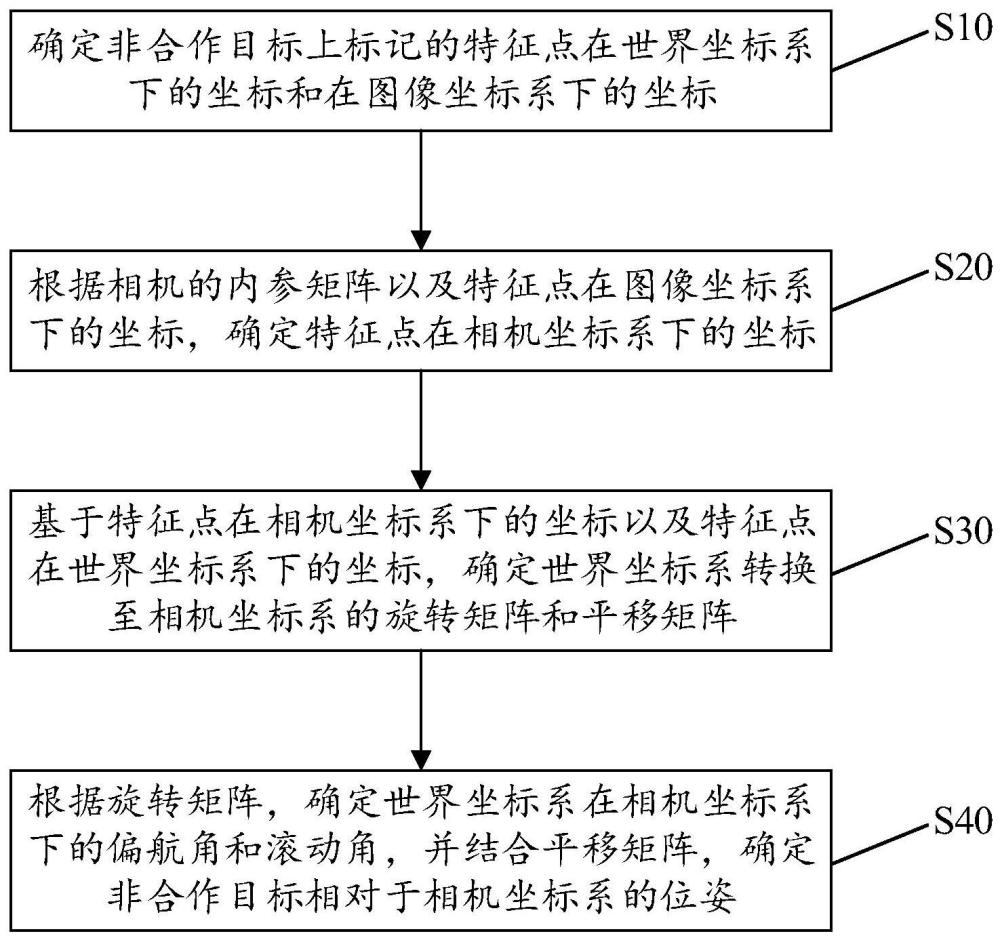
2、本公开的实施例采用如下技术方案:一种平面内非合作目标的位姿确定方法,包括:确定非合作目标上标记的特征点在世界坐标系owxwywzw下的坐标和在图像坐标系下的坐标,所述图像坐标系为相机拍摄所述非合作目标所得到的图像的相平面下的坐标系;根据相机的内参矩阵k以及所述特征点在所述图像坐标系下的坐标,确定所述特征点在相机坐标系ocxcyczc下的坐标;基于所述特征点在相机坐标系ocxcyczc下的坐标以及所述特征点在世界坐标系owxwywzw下的坐标,确定所述世界坐标系owxwywzw转换至所述相机坐标系ocxcyczc的旋转矩阵和平移矩阵,其中,相机的光心为原点oc,光轴为zc轴,相机所拍摄图像平面的水平和垂直方向分别为xc轴和yc轴,世界坐标系owxwywzw的原点ow为非合作目标的质心,xw、yw、zw与相机坐标系中的xc、yc、zc轴相平行,且正方向均保持一致,所述相机坐标系内的平面xcocyc与所述世界坐标系内的平面xwowyw不发生旋转;根据所述旋转矩阵,确定所述世界坐标系owxwywzw在所述相机坐标系ocxcyczc下的偏航角γ和滚动角α,并结合所述平移矩阵,确定所述非合作目标相对于相机坐标系ocxcyczc的位姿。
3、本公开实施例还提供了一种平面内非合作目标的位姿确定装置,包括:第一坐标确定模块,用于确定非合作目标上标记的特征点在世界坐标系owxwywzw下的坐标和在图像坐标系下的坐标,所述图像坐标系为相机拍摄所述非合作目标所得到的图像的相平面下的坐标系;第二坐标确定模块,用于根据相机的内参矩阵k以及所述特征点在所述图像坐标系下的坐标,确定所述特征点在相机坐标系ocxcyczc下的坐标;外参确定模块,用于基于所述特征点在相机坐标系ocxcyczc下的坐标以及所述特征点在世界坐标系owxwywzw下的坐标,确定所述世界坐标系owxwywzw转换至所述相机坐标系ocxcyczc的旋转矩阵和平移矩阵,其中,相机的光心为原点oc,光轴为zc轴,相机所拍摄图像平面的水平和垂直方向分别为xc轴和yc轴,世界坐标系owxwywzw的质心为原点ow,xw、yw、zw与相机坐标系中的xc、yc、zc轴相平行,且正方向均保持一致,所述相机坐标系内的平面xcocyc与所述世界坐标系内的平面xwowyw不发生旋转;位姿确定模块,用于根据所述旋转矩阵,确定所述世界坐标系owxwywzw在所述相机坐标系ocxcyczc下的偏航角γ和滚动角α,并结合所述平移矩阵,确定所述非合作目标相对于相机坐标系ocxcyczc的位姿。
4、本公开实施例还提供了一种存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上述的平面内非合作目标的位姿确定方法的步骤。
5、本公开实施例还提供了一种电子设备,至少包括存储器、处理器,所述存储器上存储有计算机程序,所述处理器在执行所述存储器上的计算机程序时实现上述的平面内非合作目标的位姿确定方法的步骤。
6、本公开实施例的有益效果在于:借助平面上的非合作目标依托地面或其他平面的特点,通过固定非合作目标两个自由度的方式,有效减少了其位姿解算时存在的奇异解,提升位姿解算速率,具有良好的解算精度和鲁棒性。
技术特征:
1.一种平面内非合作目标的位姿确定方法,其特征在于,包括:
2.根据权利要求1所述的位姿确定方法,其特征在于,所述基于所述特征点在相机坐标系ocxcyczc下的坐标以及所述特征点在世界坐标系owxwywzw下的坐标,确定所述世界坐标系owxwywzw转换至所述相机坐标系ocxcyczc的旋转矩阵和平移矩阵,包括:
3.根据权利要求1所述的位姿确定方法,其特征在于,所述根据所述旋转矩阵,确定所述世界坐标系owxwywzw在所述相机坐标系ocxcyczc下的偏航角γ和滚动角α,包括:
4.根据权利要求1所述的位姿确定方法,其特征在于,在确定非合作目标上标记的特征点在世界坐标系owxwywzw下的坐标和在图像坐标系下的坐标之前,还包括:
5.根据权利要求1所述的位姿确定方法,其特征在于,在确定非合作目标上标记的特征点在世界坐标系owxwywzw下的坐标和在图像坐标系下的坐标之前,还包括:
6.根据权利要求1所述的位姿确定方法,其特征在于,在确定所述非合作目标相对于相机坐标系ocxcyczc的位姿之后,还包括:
7.根据权利要求1至6中任一项所述的位姿确定方法,其特征在于,每张所述图像中至少包括四个特征点。
8.一种平面内非合作目标的位姿确定装置,其特征在于,包括:
9.一种存储介质,存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的平面内非合作目标的位姿确定方法的步骤。
10.一种电子设备,至少包括存储器、处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器在执行所述存储器上的计算机程序时实现权利要求1至7中任一项所述的平面内非合作目标的位姿确定方法的步骤。
技术总结
本公开提供了一种平面内非合作目标的位姿确定方法和装置,方法包括:确定非合作目标上标记的特征点在世界坐标系下的坐标和在图像坐标系下的坐标;根据相机的内参矩阵K以及特征点在图像坐标系下的坐标,确定特征点在相机坐标系下的坐标;基于特征点在相机坐标系下的坐标以及特征点在世界坐标系下的坐标,确定世界坐标系转换至相机坐标系的旋转矩阵和平移矩阵;根据旋转矩阵,确定世界坐标系在相机坐标系下的偏航角和滚动角,并结合平移矩阵,确定非合作目标相对于相机坐标系的位姿。本公开借助平面上的非合作目标依托地面的特点,通过固定自由度有效减少了其位姿解算时存在的奇异解,提升位姿解算速率,具有良好的解算精度和鲁棒性。
技术研发人员:吴定海,任国全,任志刚,王怀光,范红波,周景涛,韩兰懿,李晓磊,刘金华
受保护的技术使用者:中国人民解放军陆军工程大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!