一种无人机摄影测量配准方法、系统及计算机设备
本发明属于无人机监测领域,具体涉及一种无人机摄影测量配准方法、系统及计算机设备。
背景技术:
1、近年来,无人机摄影测量逐渐发展为新型对地观测技术手段,由于具有独特的定制化时空分辨率观测能力,在地貌过程监测、环境保护、精准农业和巡检安防等领域都发挥着重要作用。
2、无人机摄影测量技术在监测应用方面,为了获得准确的监测结果,通常需要将获取的多期航测数据配准到同一参考坐标系。针对无人机航测的配准方法主要可分为地理定位法和互配准法。地理定位法通过采集地面控制点或者使用机载定位技术来获取摄像机拍摄时的地理位置;地面控制点法受限于繁重的人工作业,而机载定位法取决于设备和环境,因此,这类方法在复杂环境下特别是山地灾害区域均存在一定限制。互配准法通过在多期数据之间寻找稳定地面特征将数据连结到同一坐标系中,这类方法仅依靠数据内部的信息进行配准,在大多数时候具有较高的精度,然而在复杂环境中,随时间变化的地表和环境条件会使得该类方法难以利用有效稳定地面特征构建足够多的连接点,从而影响多时相无人机摄影测量的精确配准。
技术实现思路
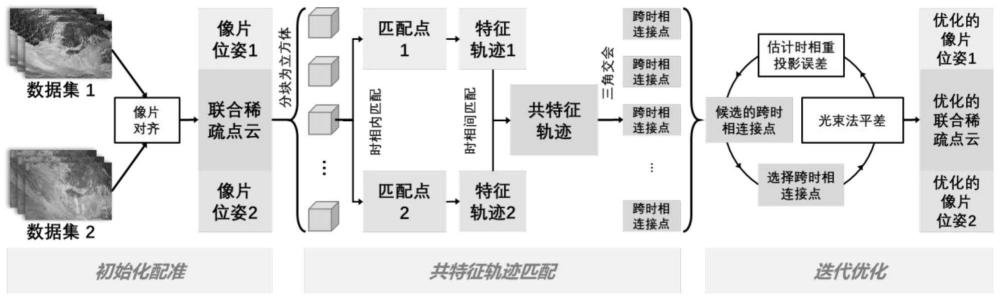
1、为了实现多时相无人机摄影测量精确配准,本发明提供了一种无人机摄影测量配准方法、系统及计算机设备,包括如下步骤:
2、获取多个无人机拍摄的不同时相的像片数据集;
3、对像片数据集中的像片进行粗配准,得到像片位姿和联合稀疏点云;
4、将所述联合稀疏点云按固定大小的网格分割;计算每个网格的外包立方体,将所述外包立方体投影到对应的像片数据集中得到掩膜多边形,以提取对应像片中的特征点子集;
5、根据所述特征点子集构建每个网格中不同时相的特征轨迹,并对不同时相的特征轨迹进行特征匹配,获取共特征轨迹;
6、根据共特征轨迹中的特征点以及对应的像片位姿确定多视光线,并通过对多视光线进行前方交会,得到共连接点的三维坐标;
7、根据共连接点的三维坐标计算所述共连接点的时相重投影误差ere,选择前λ个ere最小的所述共连接点进行配准平差;将所述像片位姿和联合稀疏点云作为配准平差的初始值,进行迭代优化,直至迭代收敛,则得到配准后的像片位姿。
8、优选的,对多个不同时相的像片数据集中的像片进行粗配准,得到像片位姿和联合稀疏点云,包括如下步骤:
9、提取多个不同时相的像片数据集中的sift特征点;
10、根据所述sift特征点对每个时相内的立体像对进行特征匹配,得到像对的相对位姿;
11、基于匹配点的传递性合并同名点的特征为特征轨迹;
12、基于立体像对和特征轨迹对齐像片并构建三维点;
13、执行光束法平差以最小化重投影误差,优化位姿参数和联合稀疏点云。
14、优选的,得到像对的相对位姿之后,还包括使用极线约束剔除误匹配。
15、优选的,计算所述共连接点的时相重投影误差ere,并进行迭代,包括如下步骤:
16、对于每次迭代,在每个网格中筛选出图像观测数多、交会角接近90°的k个共连接点,将所述k个共连接点作为初始连接点进行平差,以初始配准像片;
17、计算所述k个共连接点的时相重投影误差ere,在全局先筛选出“k1×网格数”个ere最小的提名共连接点,再从提名共连接点集中选出k2个ere达到设定值的点作为启用共连接点;
18、将启用共连接点与像片位姿、相机模型和联合稀疏点云同时进行联合光束法平差以重新优化配准结果;
19、重复上述步骤,直到迭代收敛为止;
20、将最后一次迭代的启用共连接点作为最终的共连接点,且对应的像片位姿为配准后的像片位姿。
21、优选的,所述迭代收敛为当总体平均ere的变化量连续3次小于0.001个像素。
22、优选的,所述对不同时相的特征轨迹进行特征匹配,获取共特征轨迹,包括如下步骤:
23、对于空间距离小于3米的特征轨迹对,将描述符欧式距离小于50的特征点对作为同名点;
24、将具有最小特征描述符距离的同名点作为特征轨迹对的相似性度量指标;
25、基于相似性度量指标,将互为最邻近的特征轨迹对合并作为共特征轨迹。
26、本发明还提供有一种无人机摄影测量配准系统,包括:
27、数据集获取模块,用于获取多个不同时相的像片数据集;
28、粗配准模块,用于对多个不同时相的像片数据集中的像片进行粗配准,得到像片位姿和联合稀疏点云;
29、特征点子集获取模块,用于将所述联合稀疏点云按固定大小的网格分割;计算每个网格的外包立方体,将所述外包立方体投影到对应的像片数据集中得到掩膜多边形,以提取对应像片中的特征点子集;
30、共特征轨迹获取模块,用于根据所述特征点子集构建每个网格中不同时相的特征轨迹,并对不同时相的特征轨迹进行特征匹配,获取共特征轨迹;
31、共连接点构建模块,用于根据共特征轨迹中的特征点以及对应的像片位姿确定多视光线,并通过多视前方交会,得到共连接点的三维坐标;
32、配准模块,用于计算所述共连接点的时相重投影误差ere,选择前λ个ere最小的所述共连接点进行配准平差;将所述像片位姿和联合稀疏点云作为配准平差的初始值,进行迭代优化,直至迭代收敛,则得到配准后的像片位姿。
33、本发明还提供有一种计算机设备,包括存储器和处理器;所述存储器存储有计算机程序,所述处理器用于运行所述存储器内的计算机程序,以执行无人机摄影测量配准方法。
34、本发明提供的无人机摄影测量配准方法、系统及计算机设备具有以下有益效果:
35、本发明通过构建特征轨迹来对数据进行特征聚类,并直接在特征轨迹之间进行跨时相匹配,从而构建密集的跨时相连接点,确保了对跨时相特征匹配的有效利用;通过设计分块策略,将联合稀疏点云分割为固定大小的网格,以控制跨时相连接点的生成区域,从而保证跨时相连接点在空间的均匀分布,从而能够在随时间变化的复杂环境中构建足够多的共连接点;再根据共连接点中的时相重投影误差ere设计迭代优化策略,以迭代的方式逐步更新启用的跨时相连接点集合以最小化时相重投影误差,能够得到最优跨时相连接点集合,实现了对像片位姿的精确配准。
技术特征:
1.一种无人机摄影测量配准方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的无人机摄影测量配准方法,其特征在于,对多个不同时相的像片数据集中的像片进行粗配准,得到像片位姿和联合稀疏点云,包括如下步骤:
3.根据权利要求2所述的无人机摄影测量配准方法,其特征在于,得到像对的相对位姿之后,还包括使用极线约束剔除误匹配。
4.根据权利要求1所述的无人机摄影测量配准方法,其特征在于,计算所述共连接点的时相重投影误差ere,并进行迭代,包括如下步骤:
5.根据权利要求4所述的无人机摄影测量配准方法,其特征在于,所述迭代收敛为当总体平均ere的变化量连续3次小于0.001个像素。
6.根据权利要求1所述的无人机摄影测量配准方法,其特征在于,所述对不同时相的特征轨迹进行特征匹配,获取共特征轨迹,包括如下步骤:
7.一种无人机摄影测量配准系统,包括:
8.一种计算机设备,其特征在于,包括存储器和处理器;所述存储器存储有计算机程序,所述处理器用于运行所述存储器内的计算机程序,以执行权利要求1至6任一项所述的方法。
技术总结
本发明提供了一种无人机摄影测量配准方法、系统及计算机设备,属于无人机监测领域,包括如下步骤:获取多个无人机拍摄的不同时相的像片数据集;对像片数据集中的像片进行粗配准,得到像片位姿和联合稀疏点云;将联合稀疏点云分割为固定大小的网格;计算每个网格的外包立方体,将外包立方体投影到对应的像片数据集中得到掩膜多边形,以提取掩膜多边形的特征点子集;根据特征点子集构建每个网格中不同时相的特征轨迹;对两个不同时相的特征轨迹进行特征匹配,将距离最近的同名特征作为共特征轨迹;通过三角交会,从共特征轨迹中构建共连接点;计算共连接点的时相重投影误差ERE,并进行迭代,直至迭代收敛,则得到配准后的像片位姿。
技术研发人员:丁明涛,李鑫泷,李振洪,王佳彤,刘振江,张雪松,陈毅
受保护的技术使用者:长安大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!