运维方法、系统、装置、存储介质及电子设备与流程
本发明涉及计算机,具体而言,涉及一种运维方法、系统、装置、存储介质及电子设备。
背景技术:
1、随着信息技术的发展,对于远程操作的需求越来越高。特别是在sre(sitereliability engineering,运维操作)方面,部分情况下需要采用远程操作的方式对应用进行维护操作(例如,应用重启和应用回滚等)。
2、相关技术中,很多sre操作需要在服务器或云环境中进行,并需要通过远程桌面方式、ssh(远程连接工具)等完成。但是采用远程桌面、ssh等方式进行,操作繁琐、操作难度大,且需要人工配合,运维效率低,浪费大量的人力资源,而且很容易出现误操作的情况。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种运维方法、系统、装置、存储介质及电子设备,以至少解决相关技术中运维人员采用远程桌面连接的方式对服务器进行运维操作,运维效率低的技术问题。
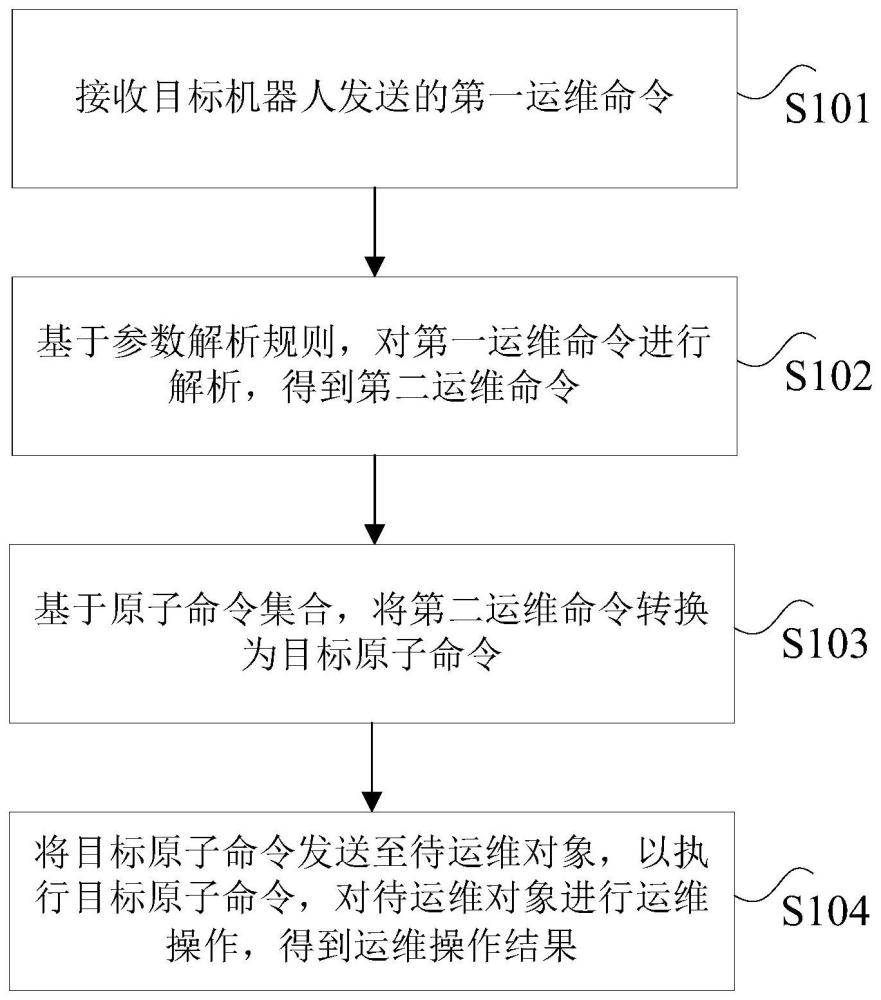
2、根据本发明实施例的一个方面,提供了一种运维方法,包括:接收目标机器人发送的第一运维命令,其中,所述目标机器人部署在办公软件中,用于接收目标对象发送的原始运维命令,并对所述原始运维命令进行加密得到所述第一运维命令;基于参数解析规则,对所述第一运维命令进行解析,得到第二运维命令,其中,所述第二运维命令的格式为命令行格式;基于原子命令集合,将所述第二运维命令转换为目标原子命令,其中,所述原子命令集合中包括:n条原子命令,所述原子命令为待运维对象能够直接执行的命令,n条所述原子命令包括所述目标原子命令,所述待运维对象的类型包括以下至少之一:服务器、应用平台,n为正整数;将所述目标原子命令发送至所述待运维对象,以执行所述目标原子命令,对所述待运维对象进行运维操作,得到运维操作结果。
3、进一步地,基于参数解析规则,对所述第一运维命令进行解析,得到第二运维命令,包括:获取所述目标机器人的签名信息,其中,所述签名信息包括:对所述第一运维命令进行解密的解密信息;基于所述签名信息,对所述第一运维命令进行解密,得到解密后的所述第一运维命令;基于所述参数解析规则,对解密后的所述第一运维命令进行解析,得到所述第二运维命令。
4、进一步地,所述参数解析规则包括:预设信息提取规则,预设格式转换规则,基于所述参数解析规则,对解密后的所述第一运维命令进行解析,得到所述第二运维命令,包括:基于所述预设信息提取规则,对解密后的所述第一运维命令进行信息提取,得到m个目标词语,其中,m为正整数;基于所述预设格式转换规则,对m个所述目标词语进行格式转换,并对格式转换后的m个所述目标词语进行组合,得到所述第二运维命令。
5、进一步地,基于原子命令集合,将所述第二运维命令转换为目标原子命令,包括:在所述原子命令集合中,查找与所述第二运维命令匹配的原子命令,得到s条所述原子命令,其中,s为小于n的正整数;对s条所述原子命令进行组合,得到所述目标原子命令。
6、进一步地,在基于所述签名信息,对所述第一运维命令进行解密之后,还包括:获取对所述第一运维命令进行解密的解密结果,其中,所述解密结果用于指示对所述第一运维命令进行解密是否解密成功;在所述解密结果指示解密失败的情况下,向所述目标机器人发送拒绝对所述待运维对象进行运维操作的提示信息;在所述解密结果指示解密成功的情况下,执行基于所述参数解析规则,对解密后的所述第一运维命令进行解析,得到所述第二运维命令的步骤。
7、进一步地,在将所述目标原子命令发送至所述待运维对象之后,包括:通过所述待运维对象执行所述目标原子命令,得到所述运维操作结果;将所述运维操作结果发送至所述目标机器人,并在所述办公软件中对所述运维操作结果进行可视化展示。
8、根据本发明实施例的另一方面,还提供了一种运维系统,包括:目标机器人,其中,所述目标机器人部署在办公软件中,用于接收目标对象发送的原始运维命令,并对所述原始运维命令进行加密得到第一运维命令;第一服务器,用于接收目标机器人发送的所述第一运维命令,并基于参数解析规则,对所述第一运维命令进行解析,得到第二运维命令,其中,所述第二运维命令的格式为命令行格式;第二服务器,用于基于原子命令集合,将所述第二运维命令转换为目标原子命令,并将所述目标原子命令发送至待运维对象,以执行所述目标原子命令,对所述待运维对象进行运维操作,得到运维操作结果,其中,所述原子命令集合中包括:n条原子命令,所述原子命令为所述待运维对象能够直接执行的命令,n条所述原子命令包括所述目标原子命令,所述待运维对象的类型包括以下至少之一:服务器、应用平台。
9、根据本发明实施例的另一方面,还提供了一种运维装置,包括:接收单元,用于接收目标机器人发送的第一运维命令,其中,所述目标机器人部署在办公软件中,用于接收目标对象发送的原始运维命令,并对所述原始运维命令进行加密得到所述第一运维命令;解析单元,用于基于参数解析规则,对所述第一运维命令进行解析,得到第二运维命令,其中,所述第二运维命令的格式为命令行格式;转换单元,用于基于原子命令集合,将所述第二运维命令转换为目标原子命令,其中,所述原子命令集合中包括:n条原子命令,所述原子命令为待运维对象能够直接执行的命令,n条所述原子命令包括所述目标原子命令,所述待运维对象的类型包括以下至少之一:服务器、应用平台,n为正整数;处理单元,用于将所述目标原子命令发送至所述待运维对象,以执行所述目标原子命令,对所述待运维对象进行运维操作,得到运维操作结果。
10、进一步地,解析单元包括:获取子单元,用于获取所述目标机器人的签名信息,其中,所述签名信息包括:对所述第一运维命令进行解密的解密信息;解密子单元,用于基于所述签名信息,对所述第一运维命令进行解密,得到解密后的所述第一运维命令;解析子单元,用于基于所述参数解析规则,对解密后的所述第一运维命令进行解析,得到所述第二运维命令。
11、进一步地,所述参数解析规则包括:预设信息提取规则,预设格式转换规则,解析子单元包括:提取模块,用于基于所述预设信息提取规则,对解密后的所述第一运维命令进行信息提取,得到m个目标词语,其中,m为正整数;处理模块,用于基于所述预设格式转换规则,对m个所述目标词语进行格式转换,并对格式转换后的m个所述目标词语进行组合,得到所述第二运维命令。
12、进一步地,转换单元包括:查找子单元,用于在所述原子命令集合中,查找与所述第二运维命令匹配的原子命令,得到s条所述原子命令,其中,s为小于n的正整数;组合子单元,用于对s条所述原子命令进行组合,得到所述目标原子命令。
13、进一步地,解析单元包括:获取子单元,用于在基于所述签名信息,对所述第一运维命令进行解密之后,获取对所述第一运维命令进行解密的解密结果,其中,所述解密结果用于指示对所述第一运维命令进行解密是否解密成功;发送子单元,用于在所述解密结果指示解密失败的情况下,向所述目标机器人发送拒绝对所述待运维对象进行运维操作的提示信息;处理子单元,用于在所述解密结果指示解密成功的情况下,执行基于所述参数解析规则,对解密后的所述第一运维命令进行解析,得到所述第二运维命令的步骤。
14、进一步地,运维装置包括:执行单元,用于在将所述目标原子命令发送至所述待运维对象之后,通过所述待运维对象执行所述目标原子命令,得到所述运维操作结果;处理单元,用于将所述运维操作结果发送至所述目标机器人,并在所述办公软件中对所述运维操作结果进行可视化展示。
15、根据本发明实施例的另一方面,还提供了一种电子设备,包括:处理器;以及存储器,用于存储处理器的可执行指令;其中,处理器配置为经由执行可执行指令来执行上述任意一项的运维方法。
16、根据本发明实施例的另一方面,还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,其中,在计算机程序运行时控制计算机可读存储介质所在设备执行上述任意一项的运维方法。
17、在本发明中,接收目标机器人发送的第一运维命令,其中,目标机器人部署在办公软件中,用于接收目标对象发送的原始运维命令,并对原始运维命令进行加密得到第一运维命令;基于参数解析规则,对第一运维命令进行解析,得到第二运维命令,其中,第二运维命令的格式为命令行格式;基于原子命令集合,将第二运维命令转换为目标原子命令,其中,原子命令集合中包括:n条原子命令,原子命令为待运维对象能够直接执行的命令,n条原子命令包括目标原子命令,待运维对象的类型包括以下至少之一:服务器、应用平台,n为正整数;将目标原子命令发送至待运维对象,以执行目标原子命令,对待运维对象进行运维操作,得到运维操作结果。进而解决了相关技术中运维人员采用远程桌面连接的方式对服务器进行运维操作,运维效率低技术问题。在本发明中,通过将目标机器人发送的第一运维命令转换为待运维对象可以直接执行的目标原子命令,通过执行目标原子命令对待运维对象进行运维操作,避免了基于远程连接的方式,通过人工对待运维对象进行运维操作,操作繁琐,运维效率低的情况,从而实现了提高运维操作效率的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!