小目标检测模型训练方法、小目标检测方法及相关设备与流程
本发明计算机视觉图像处理领域,尤其涉及一种小目标检测模型训练方法、小目标检测方法及相关设备。
背景技术:
1、随着人工智能技术的发展,无人机应用也越来越广泛,通过无人机进行航拍也较为普遍,如果快速识别获取航拍图片中的小目标,成为一个热点问题。现有方式中主要通过yolov5(you only look once v5)模型、atss(adaptive training sample selection)模型等目标检测方式进行小目标检测。
2、发明人在实现本发明的过程中,意识到现有技术至少存在如下技术问题:在一些复杂环境中,存在大量小而密集的目标,以及复杂的背景噪音干扰,采用现有方式进行小目标识别存在精准程度不高的问题。
技术实现思路
1、本发明实施例提供一种小目标检测模型训练方法、小目标检测方法、装置、计算机设备和存储介质,以提高复杂环境下小目标检测的准确率。
2、为了解决上述技术问题,本技术实施例提供一种小目标检测模型训练方法,包括:
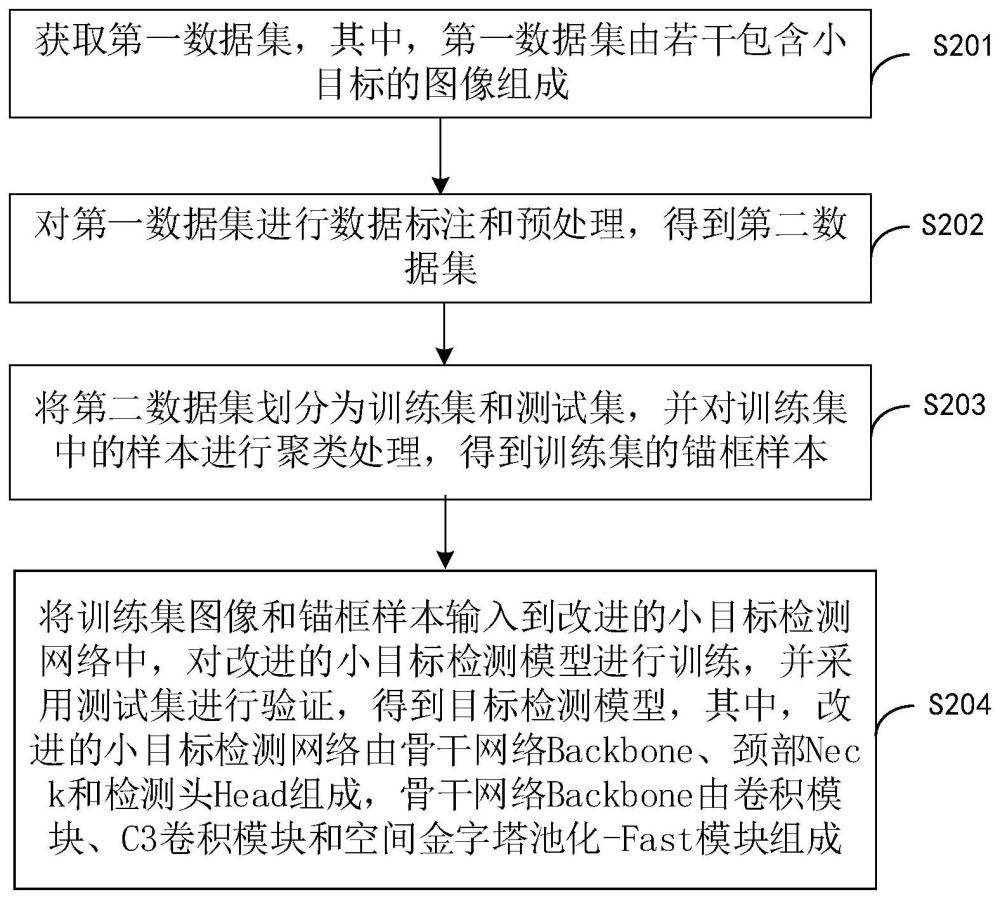
3、获取第一数据集,其中,所述第一数据集由若干包含小目标的图像组成;
4、对所述第一数据集进行数据标注和预处理,得到第二数据集;
5、将所述第二数据集划分为训练集和测试集,并对所述训练集中的样本进行聚类处理,得到所述训练集的锚框样本;
6、将所述训练集图像和锚框样本输入到改进的小目标检测网络中,对所述改进的小目标检测模型进行训练,并采用所述测试集进行验证,得到目标检测模型,其中,所述改进的小目标检测网络由骨干网络backbone、颈部neck和检测头head组成,所述骨干网络backbone由卷积模块、c3卷积模块和空间金字塔池化-fast(sppf)模块组成。
7、可选地,所述对所述第一数据集进行数据标注和预处理,得到第二数据集包括:
8、对所述第一数据集中图像的小目标进行标注,得到标注图像和标注标签文件,并采用所述标注图像构建标注数据集,其中,所述标注标签文件包括标注框类别和标注框坐标;
9、对所述标注数据集和所述标注标签文件分别进行数据预处理,得到第二数据集和目标标签文件。
10、可选地,所述对所述标注数据集和所述标注标签文件分别进行数据预处理,得到第二数据集和目标标签文件包括:
11、对所述标注数据集中的图像进行标准化和归一化处理,得到标准图像,并对所述标注标签文件的标注坐标进行转化,得到包含相对坐标的第一标签文件;
12、对所述标准图像进行增广,得到增广图像;
13、采用mosaic数据增强的方式,将第一预设数量的所述增广图像进行随机拼接,得到拼接图像,并对所述拼接图像中的标注标签文件进行对应调整,得到拼接图像对应的第二标签文件;
14、采用mixup数据增强的方式,将第二预设数量的所述增广图像按照预设比例进行混合,生成混合图像,并对所述混合图像中的标注标签文件进行对应调整,得到混合图像对应的第三标签文件;
15、采用所述增广图像、所述拼接图像和所述混合图像构建所述第二数据集,并采用所述第一标签文件、所述第二标签文件和所述第三标签文件构建所述目标标签文件。
16、可选地,所述将所述训练集图像和锚框样本输入到改进的小目标检测网络中,对所述改进的小目标检测模型进行训练包括:
17、采用边界框坐标损失lossbbox、目标分类损失losscls和目标置信度损失计算总体损失losstotal:
18、losstotal=λclslosscls+λobjlossobj+λbboxlossbbox
19、其中,λbbox、λcls和λobj分别是边界框坐标损失lossbbox、目标分类损失losscls损失项的权重系数,用于平衡不同损失项的重要性。
20、可选地,所述边界框坐标损失lossbbox采用如下公式表示:
21、
22、
23、
24、其中,ciou的三项对应iou,中心点距离,长宽比的计算,iou是预测边界框与真实边界框之间的交并比,b代表预测中心坐标的参数,bgt代表真实目标边界框中心的参数,ρ代表b和bgt之间的欧氏距离,c代表能够包含预测框和真实框的最小封闭区域的对角线距离,α是用于平衡比例的参数,v是用来衡量anchor框和目标框之间的比例一致性的参数,w、h和wgt、hgt分别代表预测框的宽高和真实框的宽高。
25、为了解决上述技术问题,本技术实施例还提供一种小目标检测方法,包括:
26、获取待检测图像;
27、将所述待检测图像输入到训练好的小目标检测模型中进行识别,得到识别结果。
28、为了解决上述技术问题,本技术实施例还提供一种小目标检测模型训练装置,包括:
29、数据获取模块,用于获取第一数据集,其中,第一数据集由若干包含小目标的图像组成;
30、数据预处理模块,用于对第一数据集进行数据标注和预处理,得到第二数据集;
31、样本处理模块,用于将第二数据集划分为训练集和测试集,并对训练集中的样本进行聚类处理,得到训练集的锚框样本;
32、模型训练模块,用于将训练集图像和锚框样本输入到改进的小目标检测网络中,对改进的小目标检测模型进行训练,并采用测试集进行验证,得到目标检测模型,其中,改进的小目标检测网络由骨干网络backbone、颈部neck和检测头head组成,骨干网络backbone由卷积模块、c3卷积模块和空间金字塔池化-fast(sppf)模块组成。
33、可选地,所述数据预处理模块包括:
34、标注单元,用于对第一数据集中图像的小目标进行标注,得到标注图像和标注标签文件,并采用标注图像构建标注数据集,其中,标注标签文件包括标注框类别和标注框坐标;
35、预处理单元,用于对标注数据集和标注标签文件分别进行数据预处理,得到第二数据集和目标标签文件。
36、可选地,所述预处理单元包括:
37、标准化子单元,用于对标注数据集中的图像进行标准化和归一化处理,得到标准图像,并对标注标签文件的标注坐标进行转化,得到包含相对坐标的第一标签文件;
38、增广子单元,用于对标准图像进行增广,得到增广图像;
39、拼接子单元,用于采用mosaic数据增强的方式,将第一预设数量的增广图像进行随机拼接,得到拼接图像,并对拼接图像中的标注标签文件进行对应调整,得到拼接图像对应的第二标签文件;
40、混合子单元,用于采用mixup数据增强的方式,将第二预设数量的增广图像按照预设比例进行混合,生成混合图像,并对混合图像中的标注标签文件进行对应调整,得到混合图像对应的第三标签文件;
41、构建子单元,用于采用增广图像、拼接图像和混合图像构建第二数据集,并采用第一标签文件、第二标签文件和第三标签文件构建目标标签文件。
42、可选地,所述模型训练模块包括:
43、损失计算单元,用于采用边界框坐标损失lossbbox、目标分类损失losscls和目标置信度损失计算总体损失losstotal:
44、losstotal=λclslosscls+λobjlossobj+λbboxlossbbox
45、其中,λbbox、λcls和λobj分别是边界框坐标损失lossbbox、目标分类损失losscls损失项的权重系数,用于平衡不同损失项的重要性。
46、为了解决上述技术问题,本技术实施例还提供一种小目标检测装置,包括:
47、图像获取模块,用于获取待检测图像;
48、目标识别模块,用于将待检测图像输入到训练好的小目标检测模型中进行识别,得到识别结果。
49、为了解决上述技术问题,本技术实施例还提供一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述小目标检测模型训练方法的步骤,或者,所述处理器执行所述计算机程序时实现上述小目标检测方法的步骤。
50、为了解决上述技术问题,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述小目标检测模型训练方法的步骤,或者,所述计算机程序被处理器执行时实现上述小目标检测方法的步骤。
51、本发明实施例提供的小目标检测模型训练方法、装置、计算机设备及存储介质,通过获取第一数据集,其中,第一数据集由若干包含小目标的图像组成;对第一数据集进行数据标注和预处理,得到第二数据集;将第二数据集划分为训练集和测试集,并对训练集中的样本进行聚类处理,得到训练集的锚框样本;将训练集图像和锚框样本输入到改进的小目标检测网络中,对改进的小目标检测模型进行训练,并采用测试集进行验证,得到目标检测模型。采用锚框样本作为模型的先验知识,用于检测和定位图像中的小目标,有利于提高小目标检测的效率和准确率。
- 还没有人留言评论。精彩留言会获得点赞!