轮毂识别方法、装置、电子设备和计算机可读存储介质与流程
本发明涉及图像处理,具体而言,涉及一种轮毂识别方法、装置、电子设备和计算机可读存储介质。
背景技术:
1、在工业机器人的智能制造领域,对轮毂的类型和位置进行高精度检测显得极为重要。例如,轮毂在制造过程中需要对其进行打磨、喷漆等,这都需要对汽车轮毂进行识别和定位。
2、在传统的工业技术中,轮毂生产线上主要采用人工进行分类,这样的分类方式效率较低且耗费较多人力。在智能的工业技术中,通过安装机器视觉系统实现轮毂的自动分类,但现有的自动分类的检测方法存在易受噪声干扰、识别不稳定等缺陷,严重影响轮毂生产线的智能化发展。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种轮毂识别方法、装置、电子设备和计算机可读存储介质,能够提高轮毂识别的效率和准确率。
2、为了实现上述目的,本发明实施例采用的技术方案如下:
3、第一方面,本发明提供一种轮毂识别方法,所述方法包括:
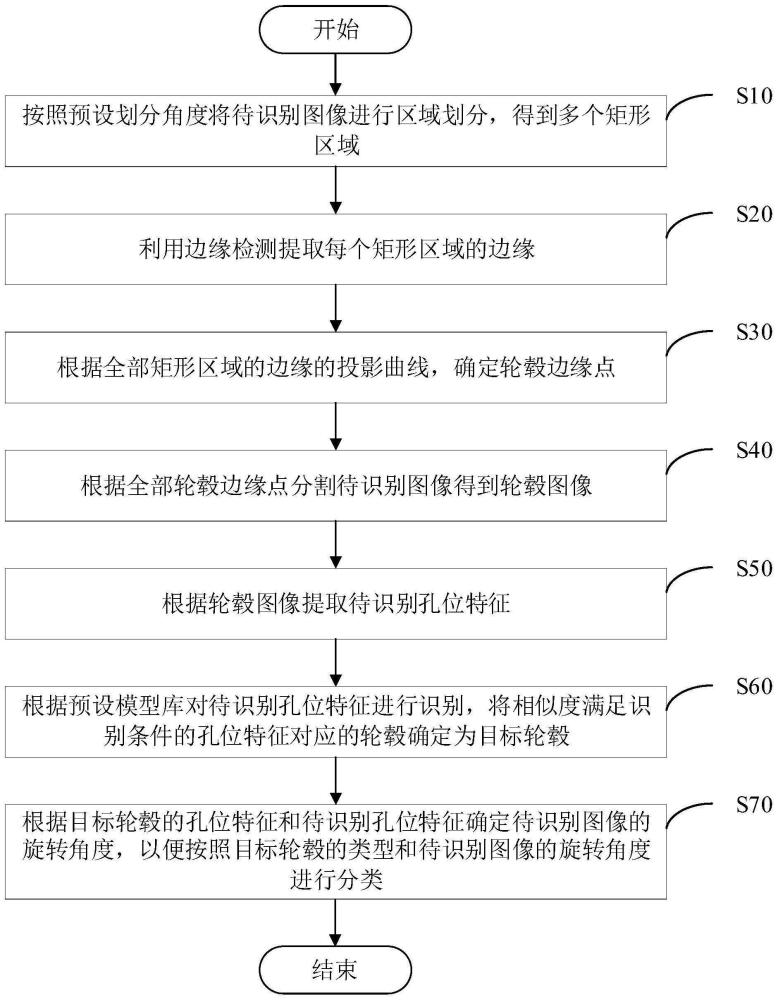
4、按照预设划分角度将待识别图像进行区域划分,得到多个矩形区域;所述矩形区域包含待识别图像中轮毂的边缘;
5、利用边缘检测提取每个所述矩形区域的边缘;
6、根据全部所述矩形区域的边缘的投影曲线,确定轮毂边缘点;
7、根据全部所述轮毂边缘点分割所述待识别图像得到轮毂图像;
8、根据所述轮毂图像提取待识别孔位特征;所述待识别孔位特征用于识别轮毂图像的轮毂类型;
9、根据预设模型库对所述待识别孔位特征进行识别,将相似度满足识别条件的孔位特征对应的轮毂确定为目标轮毂;所述相似度表征所述预设模型库中每种类型的轮毂的孔位特征与所述待识别孔位特征的相似程度;所述预设模型库存储有不同类型的轮毂的孔位特征;
10、根据所述目标轮毂的孔位特征和所述待识别孔位特征确定待识别图像的旋转角度,以便按照所述目标轮毂的类型和所述待识别图像的旋转角度进行分类。
11、在可选的实施方式中,所述按照预设划分角度将待识别图像进行区域划分,得到多个矩形区域的步骤,包括:
12、将待识别图像的中心确定为原图圆心;
13、将所述原图圆心到待识别图像的边缘之间的距离确定为矩形区域的长;
14、根据预设长宽比和所述矩形区域的长,确定为矩形区域的宽;
15、绕所述原图圆心间隔所述预设划分角度,在所述待识别图像中划分出多个所述矩形区域。
16、在可选的实施方式中,所述根据全部所述矩形区域的边缘的投影曲线,确定轮毂边缘点的步骤,包括:
17、针对每个所述矩形区域的边缘,按行累加像素值得到所述矩形区域对应的包含多个采样点的投影曲线;
18、根据每个所述矩形区域的投影曲线,获取对应的极值点坐标;
19、根据每个所述矩形区域的极值点坐标、每个所述矩形区域的长、每个所述矩形区域的旋转角度、所述待识别图像的宽度像素和所述待识别图像的高度像素,确定每个所述矩形区域的轮毂边缘点。
20、在可选的实施方式中,所述根据所述轮毂图像提取待识别孔位特征的步骤,包括:
21、将所述轮毂图像的平均像素值确定为分割阈值;
22、按照所述分割阈值对所述轮毂图像进行分割,得到二值化图像;
23、对所述二值化图像进行取反,获取满足检测条件的孔位连通域;
24、根据所述孔位连通域进行特征计算,得到所述待识别孔位特征。
25、在可选的实施方式中,孔位特征包括轮毂半径和孔位数量;所述根据预设模型库对所述待识别孔位特征进行识别,将相似度满足识别条件的孔位特征对应的轮毂确定为目标轮毂的步骤,包括:
26、根据所述轮毂半径和所述孔位数量,从预设模型库中筛选得到候选孔位特征;
27、依次将每个所述候选孔位特征和所述待识别孔位特征进行比对,计算得到对应的相似度;
28、将相似度超过相似阈值的候选孔位特征对应的轮毂确定为目标轮毂。
29、在可选的实施方式中,所述根据所述目标轮毂的孔位特征和所述待识别孔位特征确定待识别图像的旋转角度的步骤,包括:
30、根据所述目标轮毂的孔位特征,确定初始角度;
31、计算得到所述待识别孔位特征和所述目标轮毂的孔位特征之间对应孔位的角度差值;
32、根据所述初始角度和所述角度差值,确定待识别图像的旋转角度。
33、在可选的实施方式中,当采用sobel算子检测边缘时,所述利用边缘检测提取每个所述矩形区域的边缘的步骤,包括:
34、利用水平sobel算子提取每个所述矩形区域的水平边缘;
35、利用垂直sobel算子提取每个所述矩形区域的垂直边缘;
36、根据每个所述矩形区域的水平边缘和垂直边缘进行边缘融合,得到对应的矩形区域的边缘。
37、第二方面,本发明提供一种轮毂识别装置,所述装置包括:
38、检测模块,用于按照预设划分角度将待识别图像进行区域划分,得到多个矩形区域;所述矩形区域包含待识别图像中轮毂的边缘;利用边缘检测提取每个所述矩形区域的边缘;根据全部所述矩形区域的边缘的投影曲线,确定轮毂边缘点;
39、提取模块,用于根据全部所述轮毂边缘点分割所述待识别图像得到轮毂图像;根据所述轮毂图像提取待识别孔位特征;所述待识别孔位特征用于识别轮毂图像的轮毂类型;
40、识别模块,用于根据预设模型库对所述待识别孔位特征进行识别,将相似度满足识别条件的孔位特征对应的轮毂确定为目标轮毂;所述相似度表征所述预设模型库中每种类型的轮毂的孔位特征与所述待识别孔位特征的相似程度;所述预设模型库存储有不同类型的轮毂的孔位特征;根据所述目标轮毂的孔位特征和所述待识别孔位特征确定待识别图像的旋转角度,以便按照所述目标轮毂的类型和所述待识别图像的旋转角度进行分类。
41、第三方面,本发明提供一种电子设备,所述电子设备包括处理器和存储器,所述存储器用于存储程序,所述处理器用于在执行所述程序时,实现前述实施方式中任一项所述的轮毂识别方法。
42、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时,实现前述实施方式中任一项所述的轮毂识别方法。
43、相比于现有技术,本发明实施例提供的轮毂识别方法、装置、电子设备和计算机可读存储介质,按照预设划分角度将待识别图像进行区域划分,得到多个矩形区域。矩形区域包含待识别图像中轮毂的边缘。利用边缘检测提取每个矩形区域的边缘。能够提高样本冗余量和轮毂识别的抗噪能力,从而提高识别准确率。根据全部矩形区域的边缘的投影曲线,确定轮毂边缘点;根据全部轮毂边缘点分割待识别图像得到轮毂图像;根据轮毂图像提取待识别孔位特征;待识别孔位特征用于识别轮毂图像的轮毂类型;根据预设模型库对待识别孔位特征进行识别,将相似度满足识别条件的孔位特征对应的轮毂确定为目标轮毂;相似度表征预设模型库中每种类型的轮毂的孔位特征与待识别孔位特征的相似程度;预设模型库存储有不同类型的轮毂的孔位特征;根据目标轮毂的孔位特征和待识别孔位特征确定待识别图像的旋转角度,以便按照目标轮毂的类型和待识别图像的旋转角度进行分类。能够实现自动识别轮毂,在节省人力成本提高识别效率的同时,进一步提高识别准确率。
44、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!