一种用于检测飞行物体对移动物体冲击力的方法
本发明涉及冲击力的检测,更具体的说是涉及一种飞行物体对移动物体下落冲击力的检测方法。
背景技术:
1、冲击碰撞是日常生活和工程实践中经常遇到的问题。由冲击产生的冲击振动会对设备或机械部件造成很大影响,主要体现在可靠性降低、稳定性变差及使用寿命缩短,甚至严重损坏结构。飞机、舰船等设备也因武器的不断升级而需要不断的提升其抗冲击性能,快速并准确检测冲击力和定位冲击位置是一个极具有研究意义的重要课题。
2、目前,冲击力的检测和定位主要从数值模拟分析和实验分析两个方面考虑。数值模拟分析主要通过将动力学理论与有限元方法相结合来研究复杂结构的冲击动力学问题;实验分析则是通过选择合适的传感器,建立一套冲击试验测试系统,获得实验数据后通过结合冲击动力学理论来分析实验结果,得出经验公式,可在一定程度上满足工程需要。然而,随着科技的飞速发展,这种简单的处理模式需要进一步的改进,以增强其时效性。
技术实现思路
1、有鉴于此,本发明提供了一种用于检测飞行物体对移动物体冲击力的方法,旨在解决上述技术问题。
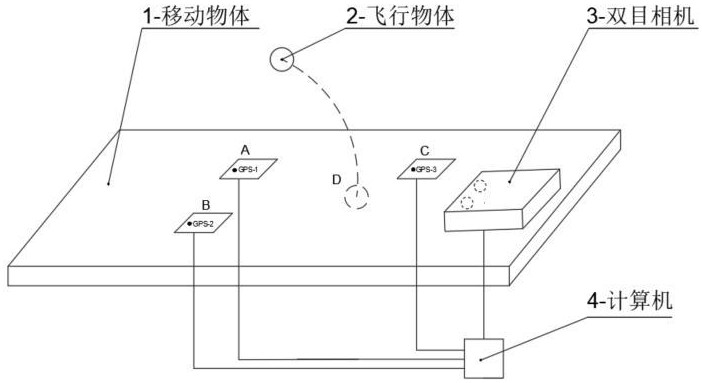
2、本发明公开提供了一种用于检测飞行物体对移动物体冲击力的方法,系统包括:移动物体(1)、飞行物体(2)、双目相机(3)、计算机(4)。计算机(4)、gps1、gps2和gps3定位器固连在移动物体(1)上,双目相机(3)和三个定位器通过数据线分别与计算机(4)相连接。
3、本发明采用如下技术方案:
4、步骤一、在移动物体(1)被碰撞区域附近选取适配点a、b、c,并分别固定安装定位器gps1、gps2和gps3,对安装在移动物体上的双目相机进行标定。
5、步骤二、当飞行物体进入相机抓拍视野时,计算机利用固定在移动物体上gps1、gps2和gps3定位器得到a、b和c点相对定系oxyz随时间n*δt(n是连拍图像的序号,n=1, 2,3…;δt是连拍图像的时间间隔)在定系oxyz中不同时刻三维坐标值。同时,启动双目相机连续拍摄,计算机可得到飞行物体相对移动物体上的动系o’x’y’z’的连拍图像,图像处理后可求得飞行物体在动系o’x’y’z’中不同时刻三维坐标值,并求取碰撞时刻d点位置坐标值(xp, yp, zp)与时间值tp。
6、步骤三、利用步骤二适配点a、b、c随时间n*δt的三维坐标值,可拟合出连续且光滑的适配点a、b、c点相对定系oxyz的牵连运动方程ae(t)、be(t)和ce(t);同理,利用飞行物体在动系o’x’y’z’中不同时刻三维坐标值,可拟合出连续且光滑的相对运动方程sr(t)。
7、步骤四、对方程ae(t)、be( t)和 ce( t)一次求导,得到牵连运动速度方程、二次求导可得牵连运动加速度方程,利用适配点a、b、c碰撞时刻速度可求得碰撞时刻移动物体角速度we、利用适配点a、b、c碰撞时刻加速度可求得碰撞时刻d点加速度ae;同理,对方程sr(t)一次求导,得到相对运动速度方程、二次求导可得相对运动加速度方程,代入碰撞时间值tp,可求得碰撞时刻飞行物体相对运动速度vr和相对加速度ar。
8、步骤五、根据加速度合成定理可求得碰撞时刻飞行物体的绝对加速度aa,通过aa与飞行物体质量m乘积即可得到冲击力 f。即:
9、经由上述的技术方案可知,与现有技术相比,本发明提供了一种飞行物体对移动物体下落冲击力的检测方法,具有系统简单、充分利用了现代检测与分析技术,具有高效实时性,可适用于多种场合。
技术特征:
1.一种用于检测飞行物体对移动物体冲击力的方法,系统包括:移动物体(1)、飞行物体(2)、双目相机(3)、计算机(4)。计算机(4)、gps1、gps2和gps3定位器固连在移动物体(1)上,双目相机(3)和三个定位器通过数据线分别与计算机(4)相连接,其特征在于,计算机利用安装在移动物体上适配点a、b和c点的gps1、gps2和gps3定位器得到移动物体相对定系oxyz的牵连运动方程ae (t)、be (t)和ce (t),计算机利用固定在移动物体上的双目相机可得到飞行物体相对移动物体上的动系o’x’y’z’的相对运动方程sr (t)和飞行物体与移动物体碰撞点d,然后,通过方程ae (t)、be (t)和ce (t)的导数,根据运动合成定理求得碰撞时刻d点的牵连加速度ae和动系的角速度we,通过sr (t)的导数求得飞行物体在碰撞时刻点d的相对速度vr和相对加速度ar,最后,根据加速度合成定理可求得碰撞时刻飞行物体的绝对加速度aa,通过aa与飞行物体质量m乘积即可得到冲击力f,即:。
技术总结
本发明公开了一种用于检测飞行物体对移动物体冲击力的方法,适用于力的检测技术领域,其方法:首先,计算机利用安装在移动物体上适配点A、B和C点的GPS1、GPS2和GPS3定位器得到适配点相对定系的牵连运动方程A<subgt;e、</subgt;B<subgt;e</subgt;和C<subgt;e</subgt;,计算机利用固定在移动物体上的双目相机得到飞行物相对移动物体上的动系的相对运动方程S<subgt;r</subgt;和飞行物体与移动物体碰撞点D。然后,通过方程A<subgt;e、</subgt;B<subgt;e</subgt;和C<subgt;e</subgt;的导数,根据运动合成定理求得碰撞时刻D点的牵连加速度a<subgt;e</subgt;和动系的角速度w<subgt;e</subgt;,通过S<subgt;r</subgt;的导数求得飞行物体在碰撞时刻点D相对速度v<subgt;r</subgt;和相对加速度a<subgt;r</subgt;。最后,根据加速度合成定理求得碰撞时刻飞行物体的绝对加速度a<subgt;a</subgt;,通过a<subgt;a</subgt;与飞行物质量乘积即冲击力。本发明操作简单,具有高效实时性。
技术研发人员:母德强,李帅,李晓东,唐海亮,司泽凯,宋文明,司苏美,王震,苍鹏,张继轩
受保护的技术使用者:长春工业大学
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!