一种传感光缆耦合变形实际位移预测方法
本发明涉及光缆位移测试,具体是一种传感光缆耦合变形实际位移预测方法。
背景技术:
1、三轴耦合实验是岩土工程领域开展室内试验,进行现场仿真模拟的一种常规实验方法。在三轴耦合实验中通常会使用一些岩土压缩实验装置,通过岩土压缩实验装置展开岩土耦合试验。
2、在专利cn116907965a中就公开了一种三轴耦合实验缸体引线装置,该装置包括施压液压缸,其设有第一法兰,第一法兰上开设有第一线孔;试验缸筒,其一端设有第二法兰,第一法兰与第二法兰固定连接,第二法兰上开设有第二线孔,第二线孔与第一线孔位置对应且其上螺纹插接有用于穿设传感光缆的第一密封插头;活塞组件,其设置在试验缸筒内,活塞组件底端与伸缩杆的杆端固定连接,活塞组件底端和顶端中部分别开设有第三线孔和第四线孔,第三线孔和第四线孔上分别螺纹插接有用于穿设传感光缆的第二密封插头和第三密封插头,活塞组件内部设有空腔;传感光缆导向组件,其固定在空腔的腔底面上。上述现有技术中的装置能够测量出传感光缆在不同围压下的测量位移,并通过测量位移计算出对应的实际位移。但是在实际测量的过程中发现,在低围压条件下,通过传感光缆测量位移计算出的实际位移与通过测量仪器测量出的传感电缆的实际位移之间存在较大的差异,导致无法根据测量位移涉及的一些参数准确的计算出传感光缆真实的实际位移,因此亟待解决。
技术实现思路
1、为了避免和克服现有技术中存在的技术问题,本发明提供了一种传感光缆耦合变形实际位移预测方法。本发明能够准确的计算出传感光缆的实际位移。
2、为实现上述目的,本发明提供如下技术方案:
3、一种传感光缆耦合变形实际位移预测方法,包括以下步骤:
4、a1、获取传感光缆在不同围压下作用时,按照测量时间依次测量得到的测量位移和实际位移,并将彼此一一对应的围压、测量时间、测量位移和实际位移存储在数据库中;
5、a2、输入待预测的围压p0,以及与p0彼此一一对应的测量时间和测量位移;
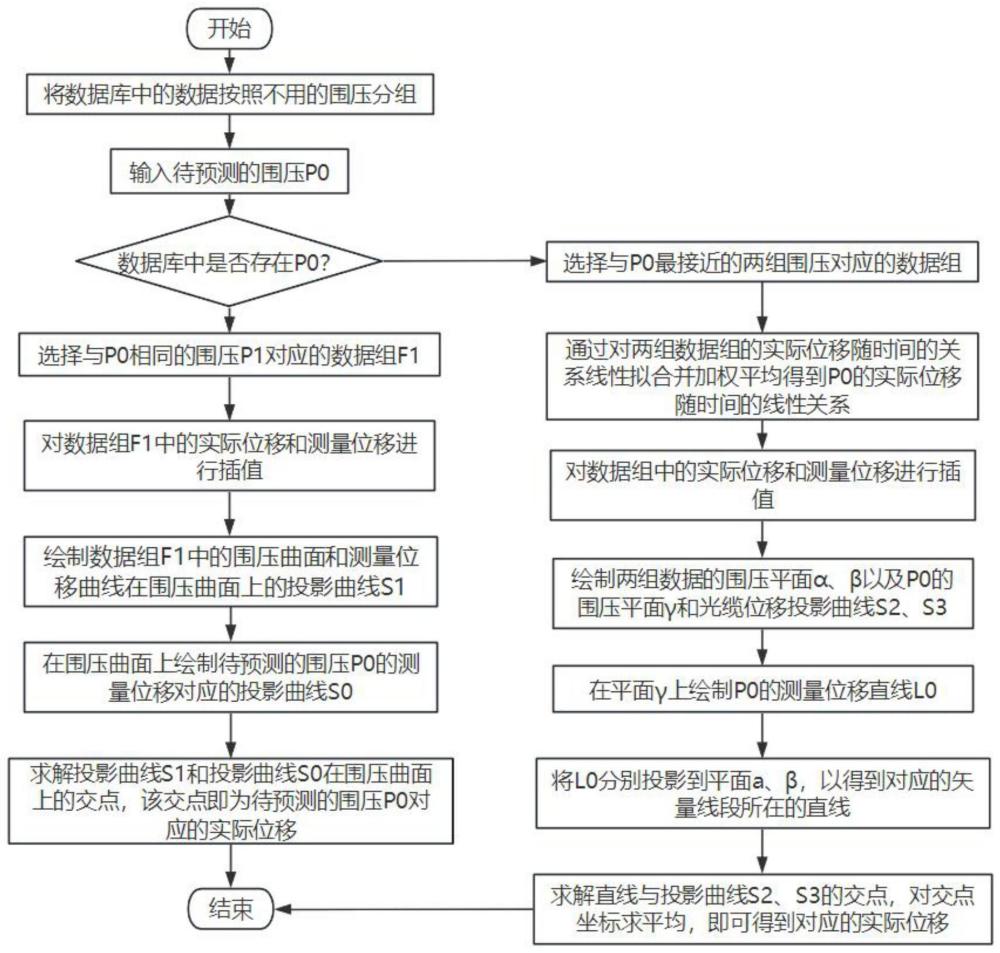
6、a3、以围压作为检索条件,在数据库中搜索是否存在与待预测的围压p0相同的围压;
7、若数据库中存在与待预测的围压p0相同的围压p1,则使用围压p1对应的测量位移和实际位移计算待预测的围压p0对应的实际位移;
8、若数据库中不存在与待预测的围压p0相同的围压,则在数据库中选取出按照围压大小顺序依次排列且与待预测的围压前后相邻的两个围压p2和p3,使用围压p2和围压p3对应的测量位移和实际位移计算待预测的围压p0的实际位移。
9、作为本发明再进一步的方案:令数据库中任一围压下对应的测量时间、测量位移和实际位移为一个数据组,则数据库中围压的数量和数据组的数量相同;同一数据组中的测量位移和实际位移均带有与测量时间彼此一一对应的时间戳。
10、作为本发明再进一步的方案:使用围压p1对应的测量位移和实际位移计算待预测的围压p0对应的实际位移的具体步骤如下:
11、a311、建立空间直角坐标系o-xyz,其中,x轴表示测量时间轴,y轴表示测量位移轴,z轴表示实际位移轴;
12、a312、获取围压p1对应的数据组f1,并对数据组f1中的测量时间、测量位移和实际位移进行三次样条差值操作,以扩充数据组f1的数据量,并将扩充后的数据组f1命名为数据组h1;
13、a313、将数据组h1中的测量时间、测量位移和实际位移写入o-xyz中,以在xy平面内得到测量位移随时间变化的变化曲线c1,在xz平面内得到实际位移随时间变化的变化曲线d1;
14、a314、将变化曲线d1沿着y轴的方向投影展开,以形成对应的曲面g1;将曲面g1沿着z轴的方向向曲面g1投影,在曲面g1上形成投影曲线s1;
15、a315、将待预测的围压p0的数据组f0中的测量时间和测量位移写入到o-xyz中,以在xy平面内得到测量位移随时间变化的变化曲线c0,将变化曲线c0沿着z轴的方向向曲面g1投影,在曲面g1上形成投影曲线s0;
16、a316、曲线s1与曲线s0在曲面g1上的交点,即为预测的围压p0在对应的测量时间和测量位移下的实际位移。
17、作为本发明再进一步的方案:使用围压p2和围压p3对应的测量位移和实际位移计算预测的围压p0的实际位移的具体步骤如下:
18、a321、获取围压p2对应的数据组f2,并对数据组f2中的测量时间、测量位移和实际位移进行三次样条差值操作,以扩充数据组f2的数据量,并将扩充后的数据组f2命名为数据组h2;
19、获取围压p3对应的数据组f3,并对数据组f3中的测量时间、测量位移和实际位移进行三次样条差值操作,以扩充数据组f3的数据量,并将扩充后的数据组f3命名为数据组h3;
20、a322、对数据组h2中的实际位移与对应的测量时间进行线性拟合,以得到一次函数l2,并在xz平面内绘制一次函数l2的图像;
21、同时对数据组h3中的实际位移与对应的测量时间进行线性拟合,以得到一次函数l3,并在o-xyz的xz平面内绘制一次函数l3的图像;
22、结合一次函数l2和一次函数l3构成如下方程组:
23、
24、其中,z2表示围压p2中的实际位移;x表示时间;k2表示一次函数l2的斜率;b2表示一次函数l2的横截距;
25、z3表示围压p3中的实际位移;k3表示一次函数l3的斜率;b3表示一次函数l3的横截距;
26、a323、将一次函数l2的图像沿着y轴的方向投影展开,延伸形成平面α;将围压p2的数据组f2中的测量时间和测量位移写入到o-xyz中,以在xy平面内得到测量位移随时间变化的变化曲线c2,将变化曲线c2沿着z轴的方向向平面α投影,在平面α上形成投影曲线s2;
27、将一次函数l3的图像沿着y轴的方向投影展开,延伸形成平面β;将围压p3的数据组f3中的测量时间和测量位移写入到o-xyz中,以在xy平面内得到测量位移随时间变化的变化曲线c3,将变化曲线c3沿着z轴的方向向平面β投影,在平面β上形成投影曲线s3;
28、a324、通过一次函数l2和一次函数l3拟合构建同于计算待预测的围压p0的初步实际位移的一次函数l0;一次函数l0具体表示如下:
29、l0:z0=(ω2k2+ω3k3)x+(ω2b2+ω3b3)
30、
31、ω3=1-ω2
32、其中,z0表示待预测的围压p0计算得到的初步实际位移;ω2表示围压p2对待预测的围压p0的权重;ω3表示围压p3对待预测的围压p0的权重;
33、a325、在o-xyz的xz平面内绘制一次函数l0的图像,并将一次函数l0的图像沿着y轴的方向投影展开,延伸形成平面y;
34、a326、在待预测的围压p0的数据组f0中任选一条测量位移数据,并在平面γ内绘制一条垂直于y轴的线段rr′,且线段rr′所在的直线与y轴相交,交点即为该选取的测量位移数据;
35、a327、获取平面α的法向量以及平面α内的任一点qα,将qα分别与线段rr′的两个端点相连,以形成矢量线段和矢量线段接着使矢量线段和矢量线段分别沿着垂直法向量方向向法向量投影,并得到对应的投影长度,投影长度表示如下:
36、
37、
38、其中,dα表示矢量线段在法向量上的投影长度;dα′表示矢量线段在法向量上的投影长度;
39、a328、计算矢量线段的端点r在法向量上的投影点rα位于o-xyz中的矢量坐标以及矢量线段的端点r′在法向量上的投影点rα′位于o-xyz中的矢量坐标坐标计算如下:
40、
41、
42、其中,表示qα点在o-xyz中的矢量坐标;
43、连接投影点rα和投影点rα′组合构成矢量线段沿着z轴方向将矢量线段投影到平面α上,形成投影曲线r2,且投影曲线r2与投影曲线s2相交于点e2;
44、a329、按照步骤a327和步骤a328的处理方式获取平面β对应的矢量线段沿着z轴方向将矢量线段投影到平面β上,形成投影曲线r3,且投影曲线r3与投影曲线s3相交于点e3;
45、获取点e2在z轴上的坐标值e2z,以及点e3在z轴上的坐标值e3z,对坐标值e2z和坐标值e3z进行二分化处理,取两者的中间值,该中间值即为步骤a326中从待预测的围压p0的数据组f0中选取的测量位移数据对应的最终实际位移;
46、a3210、按照步骤a326和步骤a329的处理方式对待预测的围压p0的数据组f0中的测量位移进行循环操作,即可获得待预测的围压p0的各个测量位移对应的实际位移。
47、与现有技术相比,本发明的有益效果是:
48、本发明通过对测量位移、测量时间和测量得到的实际位移进行分析,能够精准的得出三者之间存在的关系,进而建立预测性能优异的预测模型,并通过模型有效的提高实际位移预测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!