基于ObjectARX的宗地图和房屋平面图注记移动方法及装置与流程
本技术涉及注记移动领域,尤其涉及一种基于objectarx的宗地图和房屋平面图注记移动方法及装置。
背景技术:
1、当前房地一体工作,已进入成果归档及发证阶段,根据《“房地一体”农村宅基地和集体建设用地确权登记发证技术服务项目技术设计书》及其他相关文件的要求,最终提交的成果需包含宗地图;但当前使用的房地一体内业软件导出的宗地图存在较多四至、注记、边长等的压盖情况,需人工调整优化之后才能满足提交要求,同时宗地面积过大,内业调整的工作量极大。因此为了按时、保质保量的提交成果,优化现有的cad图形绘制技术,提升内业绘图效率具有重要意义。
2、目前解决宗地图和房屋平面图注记压盖的方法是人工打开每一dwg文件,然后逐一检查注记与注记之间、注记与其它要素之间是否相互压盖,对于压盖的注记,人工移动到恰当的位置,保证注记清晰完整的同时,做到图幅整洁;但其存在效率低、易错漏和难移动的问题。因此,提高注记移动的效率、解决注记移动过程中的易错漏和难移动是一个亟需解决的问题。
技术实现思路
1、本技术的主要目的在于克服现有技术的缺点与不足,提供一种基于objectarx的宗地图和房屋平面图注记移动方法及装置,通过批量自动处理宗地图压盖问题,实现秒级处理,效率高,移动位置准确,极大提高作业效率和准确性。
2、为了达到上述目的,本技术采用以下技术方案:
3、第一方面,本技术提供了一种基于objectarx的宗地图和房屋平面图注记移动方法,包括下述步骤:
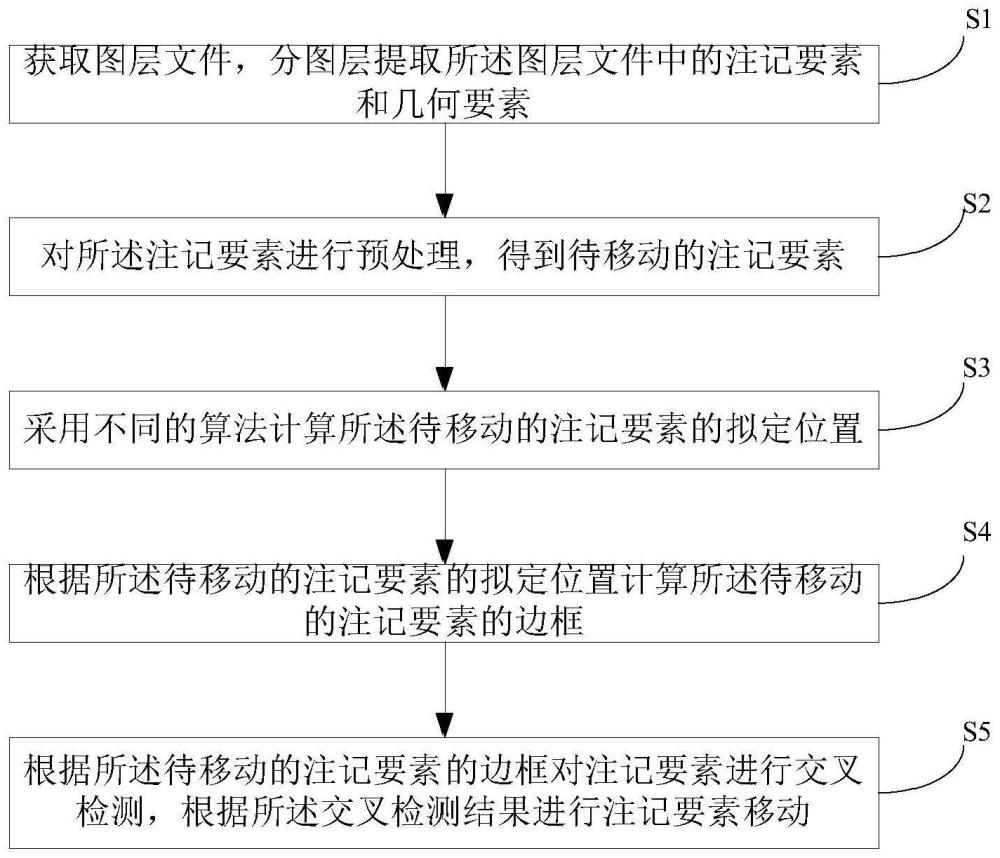
4、获取图层文件,分图层提取所述图层文件中的注记要素和几何要素;
5、对所述注记要素进行预处理,得到待移动的注记要素;
6、采用不同的算法计算所述待移动的注记要素的拟定位置;
7、根据所述待移动的注记要素的拟定位置计算所述待移动的注记要素的边框;
8、根据所述待移动的注记要素的边框对注记要素进行交叉检测,根据所述交叉检测的结果进行注记要素移动。
9、作为优选的技术方案,所述图层包括图框图层、居民地图层、界址线图层、界址点图层以及门牌号图层。
10、作为优选的技术方案,所述注记要素,包括:
11、图框图层注记要素:比例尺、权利人qlr、宗地编号zdbh、用地类型ydlx、相邻权利人xlqlr、四至sz;
12、居民地图层提取的注记要素:房屋结构属性jmd及数量;
13、界址线图层提取的注记要素:权利人界址线边长jzd;
14、界址点图层提取的注记要素:界址点点号jzp。
15、所述几何要素包括:权利人界址线qlr_l、其他界址线或其他线性要素jzx_l。
16、作为优选的技术方案,所述对所述注记要素进行预处理,步骤为:
17、首先,提取图层的图框边界;
18、其次,根据图框边界提取比例尺,根据比例尺参数对相关点线要素与注记要素进行一一匹配,并合并离散注记要素;
19、最后,确定待移动注记图层以及待移动的注记要素。
20、作为优选的技术方案,所述采用不同的算法计算所述待移动的注记要素的拟定位置,包括回形移动算法和平行移动算法;
21、所述回形移动算法的步骤为:
22、分别定义当前环状结构的左边界、右边界、上边界和下边界;
23、定义一个二维数组,存储回形矩阵;
24、定义当前填充位置的变量,所述当前填充位置的初始值为原注记的几何位置;
25、定义x方向的步长为δx、y方向的步长为δy;
26、从内到外依次填充每个环状结构,直到填充完整个回形矩阵;
27、对于每个环状结构,按照逆时针方向,从左边界到右边界、从下边界到上边界、从右边界到左边界、从上边界到下边界的顺序依次填充;
28、每填充一个位置,当前填充位置的变量就相应增减δx、δy;
29、填充完整个回形矩阵后,返回二维数组;
30、所述平行移动算法的步骤为:
31、以注记的线段的中点作为中心点,获取和该线段平行的点集;
32、获取注记要素的旋转角度α、原几何坐标点o(x0,y0)以及垂直的距离d;
33、计算平移点pt(x,y)的坐标:
34、x=x0+d*sinα
35、y=y0+d*cosα
36、修改垂直距离d,获取同一垂直线上的其它点;
37、对注记要素的原几何坐标点进行等间距平移,然后依此类推,获取左侧和右侧的垂直线上的其它点。
38、作为优选的技术方案,所述根据所述待移动的注记要素的拟定位置计算所述待移动的注记要素的边框,步骤为:
39、已知注记要素的几何坐标pos(x,y)、对齐点坐标ali(x,y)以及注记要素旋转角度α;其中,注记要素的对齐方式为居中对齐,即水平和垂直均为居中,其中注记要素的几何坐标在左下角,对齐点为注记要素的中心点;
40、设注记要素边框的左下角坐标leftbot、右下角坐标rightbot、左上角坐标lefttop、右上角坐标righttop,leftbot与注记要素的几何坐标pos(x,y)为同一点;
41、当α=0或α=180°时:
42、w=(ali.x-pos.x)*2
43、h=(ali.y-pos.y)*2
44、其中,w和h分别表示注记边框的宽和高。
45、则:
46、rightbot=(leftbot.x+w,leftbot.y)
47、lefttop=(leftbot.x,leftbot.y+h)
48、righttop=(leftbot.x+w,leftbot.y+h)
49、当α≠0且α≠180°时:
50、righttop=(ali.x*2-leftbot.x*2,ali.y*2-leftbot.y*2)
51、通过对齐点坐标ali(x,y)和注记要素的几何坐标pos(x,y),计算对齐点坐标到注记要素几何坐标的距离c、对齐点坐标到注记要素几何坐标方位角为β,则:
52、w=c*cos(β-α)*2
53、rightbot=(leftbot.x+w*cos(α),leftbot.y+w*sin(α))
54、lefttop=(ali.x*2-rightbot.x,ali.y*2-rightbotpt.y)。
55、作为优选的技术方案,所述交叉检测的步骤为:
56、先检测一个注记要素是否和其它注记要素或点线要素压盖;如果压盖,将该注记要素移动到下一个拟定位置,再检测拟定位置是否和其它注记要素或点线要素是否压盖,直到不压盖为止,则该拟定位置为最佳点位;
57、若所有拟定位置都会压盖,即无法移动,则降低要求,根据点线要素的优先级关系,在无法移动的情况下,该注记要素压盖优先级低的点线要素;在降低压盖标准后,若仍然无法移动的,返回原位或者根据要求进行隐藏。
58、第二方面,本技术提供了一种基于objectarx的宗地图和房屋平面图注记移动装置,应用于所述的基于objectarx的宗地图和房屋平面图注记移动方法,包括提取注记要素模块、预处理模块、计算拟定位置模块、计算注记要素边框模块以及交叉检测模块;
59、所述提取注记要素模块,用于获取图层文件,分图层提取所述图层文件中的注记要素和几何要素;
60、所述预处理模块,用于对所述注记要素进行预处理,得到待移动的注记要素;
61、所述计算拟定位置模块,用于采用不同的算法计算所述待移动的注记要素的拟定位置;
62、所述计算注记要素边框模块,用于根据所述待移动的注记要素的拟定位置计算所述待移动的注记要素的边框;
63、所述交叉检测模块,用于根据所述待移动的注记要素的边框对注记要素进行交叉检测,根据所述交叉检测结果进行注记要素移动。
64、第三方面,本技术提供了一种电子设备,所述电子设备包括:
65、至少一个处理器以及与所述至少一个处理器通信连接的存储器;
66、其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序指令,所述计算机程序指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述的基于objectarx的宗地图和房屋平面图注记移动方法。
67、第四方面,本技术提供了一种计算机可读存储介质,存储有程序,所述程序被处理器执行时,实现所述的基于objectarx的宗地图和房屋平面图注记移动方法。
68、综上所述,与现有技术相比,本技术提供的技术方案带来的有效效果至少包括:
69、本技术提出了一种基于objectarx的宗地图和房屋平面图注记移动方法,包括获取图层文件,分图层提取图层文件中的注记要素;获取图层文件,分图层提取图层文件中的注记要素和几何要素;对注记要素进行预处理,得到待移动的注记要素;采用不同的算法计算待移动的注记要素的拟定位置;根据待移动的注记要素的拟定位置计算待移动的注记要素的边框;根据待移动的注记要素的边框对注记要素进行交叉检测,根据交叉检测结果进行注记要素移动;本技术中不同的注记使用不同的移动算法进行移动,确保符合原始图幅的要求,且能够批量自动处理宗地图压盖问题,并且实现秒级处理,效率高,移动位置准确,极大提高作业效率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!