载带加工设备的控制方法、装置、设备及存储介质与流程
本申请涉及载带加工设备控制,尤其涉及一种载带加工设备的控制方法、装置、设备及存储介质。
背景技术:
1、载带是指在一种应用于电子包装领域的带状产品,它具有特定的厚度,在其长度方向上等距分布着用于承放电子元器件的带有口袋和用于进行索引定位的孔。具体地,载带加工工序通常需要依序经过成型、冲孔、分切、收卷工序,最后通过收卷装置对加工成型后的载带进行收卷。
2、由于在实际生产的过程中,加工成型的载带在被卷入料盘之前会经过导轮,其中,导轮用于限制载带位置防止载带抖动,但随着卷料盘越来越大,载带运动位置变化会使得载带逐渐脱离导轮,导致载带无法被稳定传输至卷料盘。
技术实现思路
1、本申请的主要目的在于提供一种载带加工设备的控制方法、装置、设备及存储介质,旨在解决相关技术中,在加工成型的载带在被卷入料盘时,随着卷料盘越来越大,载带运动位置变化会使得载带逐渐脱离导轮,导致载带无法被稳定传输至卷料盘的技术问题。
2、为实现上述目的,本申请实施例提供了一种载带加工设备的控制方法,所述方法包括:
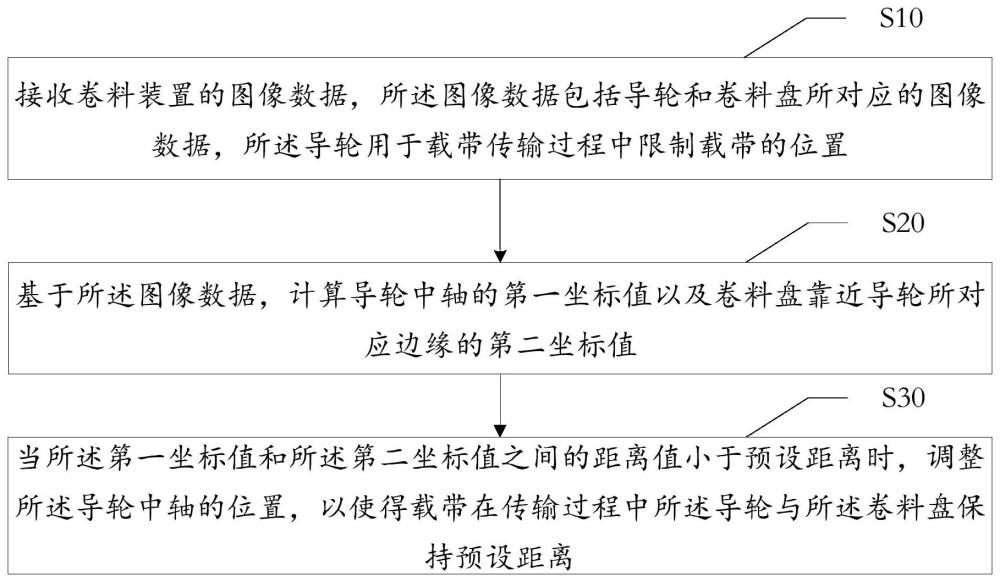
3、接收卷料装置的图像数据,所述图像数据包括导轮和卷料盘所对应的图像数据,所述导轮用于载带传输过程中限制载带的位置;
4、基于所述图像数据,计算导轮中轴的第一坐标值以及卷料盘靠近导轮所对应边缘的第二坐标值;
5、当所述第一坐标值和所述第二坐标值之间的距离值小于预设距离时,调整所述导轮中轴的位置,以使得载带在传输过程中所述导轮与所述卷料盘保持预设距离。
6、在本申请的一种可能的实施方式中,所述调整所述导轮中轴的位置的步骤之后,还包括:
7、通过角度传感器计算所述卷料盘在预设时间段内的第一角速度;
8、若所述第一角速度大于预设角速度,则调整所述第一角速度的速度值,直至所述第一角速度等于预设角速度。
9、在本申请的一种可能的实施方式中,所述若所述第一角速度大于预设角速度,则调整所述第一角速度的速度值,直至所述第一角速度等于预设角速度的步骤,包括:
10、若所述第一角速度大于预设角速度,增大所述卷料盘所在电路中的电阻值,以减小所述电路中的电流值,直至所述第一角速度等于预设角速度。
11、在本申请的一种可能的实施方式中,所述接收卷料装置的图像数据的步骤之前,还包括:
12、获取载带图像数据,根据所述载带图像数据,确定载带上各个微孔的微孔图像;
13、将各所述微孔图像与预设合格孔形图像进行匹配,得到第一匹配度;
14、若所述第一匹配度大于预设匹配度阈值,则确定所述载带为合格产品,否则,判定所述载带存在缺陷。
15、在本申请的一种可能的实施方式中,所述若所述第一匹配度大于预设匹配度阈值,则确定所述载带为合格产品,否则,判定所述载带存在缺陷的步骤之后,还包括:
16、若确定所述载带存在缺陷,则检测所述载带的位置是否与载带加工位置完全对应;
17、若否,则将所述载带移动至所述载带加工位置;
18、若是,则调整所述载带的打孔参数,直至所述第一匹配度大于等于预设匹配度阈值。
19、在本申请的一种可能的实施方式中,所述基于所述图像数据,计算导轮中轴的第一坐标值以及卷料盘靠近导轮所对应边缘的第二坐标值的步骤,包括:
20、将所述图像数据灰度化,并将灰度化后的图像数据转换为二值图像;
21、对所述二值图像进行边缘获取,确定所述二值图像的坐标轴;
22、计算导轮中轴的第一像素点以及卷料盘靠近导轮所对应边缘的第二像素点;
23、根据所述坐标轴与所述二值图像中各个像素点的对应关系,将所述第一像素点以及所述第二像素点分别转化为第一坐标值和第二坐标值。
24、在本申请的一种可能的实施方式中,所述当所述第一坐标值和所述第二坐标值之间的距离值小于预设距离时,调整所述导轮中轴的位置的步骤,包括:
25、计算预设距离与所述距离值之间的第一差值;
26、沿所述卷料盘的中轴至所述导轮中轴的延长线,控制所述导轮中轴移动所述第一差值对应的距离。
27、本申请还提供一种载带加工设备的控制装置,所述载带加工设备的控制装置包括:
28、接收模块,用于接收卷料装置的图像数据,所述图像数据包括导轮和卷料盘所对应的图像数据,所述导轮用于载带传输过程中限制载带的位置;
29、第一计算模块,用于基于所述图像数据,计算导轮中轴的第一坐标值以及卷料盘靠近导轮所对应边缘的第二坐标值;
30、第一调整模块,用于当所述第一坐标值和所述第二坐标值之间的距离值小于预设距离时,调整所述导轮中轴的位置,以使得载带在传输过程中所述导轮与所述卷料盘保持预设距离。
31、本申请还提供一种载带加工设备的控制设备,所述载带加工设备的控制设备为实体节点设备,所述载带加工设备的控制设备包括:存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的所述载带加工设备的控制方法的程序,所述载带加工设备的控制方法的程序被处理器执行时可实现如上述所述载带加工设备的控制方法的步骤。
32、为实现上述目的,还提供一种存储介质,所述存储介质上存储有载带加工设备的控制程序,所述载带加工设备的控制程序被处理器执行时实现上述任一所述的载带加工设备的控制方法的步骤。
33、本申请提供了一种载带加工设备的控制方法、装置、设备及存储介质,与相关技术中,在加工成型的载带在被卷入料盘时,随着卷料盘越来越大,载带运动位置变化会使得载带逐渐脱离导轮,导致载带无法被稳定传输至卷料盘相比,在本申请中,通过接收卷料装置的图像数据,所述图像数据包括导轮和卷料盘所对应的图像数据,所述导轮用于载带传输过程中限制载带的位置;基于所述图像数据,计算导轮中轴的第一坐标值以及卷料盘靠近导轮所对应边缘的第二坐标值;当所述第一坐标值和所述第二坐标值之间的距离值小于预设距离时,调整所述导轮中轴的位置,以使得载带在传输过程中所述导轮与所述卷料盘保持预设距离。可以理解,通过获取导轮以及卷料盘的图像数据,基于二者的坐标,计算出导轮与卷料盘的距离值,当检测到导轮和卷料盘边缘的距离过近时,调整导轮中轴的位置,使得导轮与卷料盘可以始终保持预设距离,进而,避免载带运动位置变化会使得载带逐渐脱离导轮,使得载带可以被稳定传输至卷料盘。
技术特征:
1.一种载带加工设备的控制方法,其特征在于,所述方法包括以下步骤:
2.如权利要求1所述的载带加工设备的控制方法,其特征在于,所述调整所述导轮中轴的位置的步骤之后,还包括:
3.如权利要求2所述的载带加工设备的控制方法,其特征在于,所述若所述第一角速度大于预设角速度,则调整所述第一角速度的速度值,直至所述第一角速度等于预设角速度的步骤,包括:
4.如权利要求1所述的载带加工设备的控制方法,其特征在于,所述接收卷料装置的图像数据的步骤之前,还包括:
5.如权利要求4所述的载带加工设备的控制方法,其特征在于,所述若所述第一匹配度大于预设匹配度阈值,则确定所述载带为合格产品,否则,判定所述载带存在缺陷的步骤之后,还包括:
6.如权利要求1所述的载带加工设备的控制方法,其特征在于,所述基于所述图像数据,计算导轮中轴的第一坐标值以及卷料盘靠近导轮所对应边缘的第二坐标值的步骤,包括:
7.如权利要求1所述的载带加工设备的控制方法,其特征在于,所述当所述第一坐标值和所述第二坐标值之间的距离值小于预设距离时,调整所述导轮中轴的位置的步骤,包括:
8.一种载带加工设备的控制装置,其特征在于,所述载带加工设备的控制装置包括:
9.一种载带加工设备的控制设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的载带加工设备的控制程序,所述载带加工设备的控制程序配置为实现如权利要求1至7中任一项所述的载带加工设备的控制方法的步骤。
10.一种计算机存储介质,其特征在于,所述计算机存储介质上存储有载带加工设备的控制程序,所述载带加工设备的控制程序被处理器执行时实现如权利要求1至7中任一项所述的载带加工设备的控制方法的步骤。
技术总结
本申请公开了一种载带加工设备的控制方法、装置、设备及存储介质,该方法包括步骤:接收卷料装置的图像数据,所述图像数据包括导轮和卷料盘所对应的图像数据,所述导轮用于载带传输过程中限制载带的位置;基于所述图像数据,计算导轮中轴的第一坐标值以及卷料盘靠近导轮所对应边缘的第二坐标值;当所述第一坐标值和所述第二坐标值之间的距离值小于预设距离时,调整所述导轮中轴的位置,以使得载带在传输过程中所述导轮与所述卷料盘保持预设距离。本申请根据接收的图像数据,调整导轮中轴的位置,以使得载带在传输过程中导轮与卷料盘保持预设距离,使得载带可以被稳定传输至卷料盘。
技术研发人员:高永,刘诚,朱兆飞,陈殷,雷美云,江宇辉
受保护的技术使用者:深圳市中欧新材料有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!