一种用于公路里程桩定位的方法、系统和车载主机与流程
本技术涉及定位,尤指一种用于公路里程桩定位的方法、系统和车载主机。
背景技术:
1、在位置标定相关的领域,通常人们使用经纬度坐标来表示位置。然而,在交通领域,公路上的位置还会使用桩号来表示。所谓公路桩号,指的是以公路起点为零点,按照一定的规则设置的公路里程标志。公路桩号在定位导航,事故处理,交通管理和公路建设等方面都起着重要的作用。
2、在我国,公路桩号通过由公里数和米数两部分组成:公里数表示公路起点到该处的距离,米数表示该处与上一个公里桩号的距离。具体来说,桩号中的k*+***是表示该路线中线位置沿路线曲线中线至路线起点(k0+000m处)的水平距离。
3、为了便于标定公路线路中线位置和长度,由线路起点开始,沿着中线方向每隔一定距离在公路右侧绿化带或者护栏上设置公路里程桩,公路里程桩可分为公里桩和百米桩。公里桩为每隔1公里设置一块,上面标注了公路的名称和公里数,百米桩则每隔100米会出现一块,以“1-9”的数字代表百米数,例如9就是代表900米。
4、公路里程桩一般指的是公里桩,其存在形式有标牌与石碑两种。在公路路面状况自动化检测技术中,一般通过车载摄像机拍摄路面图像,以及卫星定位数据获取实时的经纬度坐标,结合深度学习算法,分析出路面上的病害及其经纬度坐标。但是实际上公路管养部门不仅需要知道路面病害的经纬度坐标,同时还需要知道其桩号位置。因此,有必要将经纬度坐标转换为桩号位置,因此,在此转换过程中,公路里程桩的准确经纬度数据是必需的。
5、然而,现实情况下公路里程桩经纬度的数据缺失,或者不准确的情况时有发生,这给检测工作带来了诸多不便。但是如果通过人工路查的方式采集公路里程桩的经纬度数据,则工作量太大;如果通过双目立体相机,结合卫星定位的方式,则系统又较为复杂,成本高且不便于使用,其结合卫星定位技术,对公路里程桩号进行定位,获取经纬度坐标。但是,双目立体视觉需要两台摄像机,系统构成复杂,成本高且不便于应用推广。
6、申请内容
7、本技术提供一种基于单目视觉的用于公路里程桩定位的方法、系统和车载主机,以解决现有技术不能方便且低成本地实现公路里程桩定位的问题。
8、为了解决前述技术问题,本技术实施例提供了一种用于公路里程桩定位的车载主机,所述车载主机包括:
9、接收模块,用于接收车载摄像机获取行车视角下的路域环境图像;
10、检测模块,用于检测所述路域环境图像中的公路里程桩;
11、所述接收模块,还用于当检测到所述路域环境图像中包含公路里程桩时,从车载定位设备获取车辆当前实时经纬度数据和车头朝向的方位角;
12、定位模块,用于根据包含公路里程桩的路域环境图像、车辆当前实时经纬度数据和车头朝向的方位角,计算公路里程桩的经纬度数据。
13、优选的,所述定位模块具体包括:
14、选取单元,用于从所述路域环境图像中选取路域环境图像画面底部边缘中点作为参考点p1;
15、计算单元,用于根据所述车辆当前实时经纬度数据和车头朝向的方位角、参考点p1,计算公路里程桩的经纬度数据。
16、优选的,所述计算单元具体包括:
17、第一计算子单元,用于计算选取的所述参考点p1的经纬度数据;
18、第二计算子单元,用于计算公路里程桩p2点相对于参考点p1的位置偏移,所述位置偏移包括公路里程桩p2相对于参考点p1的偏移角度与偏移距离;
19、第三计算子单元,用于根据所述位置偏移和参考点p1的经纬度数据和车头朝向的方位角,计算得到所述公路里程桩的经纬度数据。
20、优选的,所述第二计算子单元包括:
21、坐标转换子单元,用于通过透视变换矩阵,将参考点p1和公路里程桩位置点p2的坐标分别转换为正视地面画面的坐标;
22、偏移计算子单元,用于根据转换后的坐标计算公路里程桩位置点p2相对于参考点p1实际位置的偏移角度与偏移距离。
23、第二方面,本技术实施例还提供了一种用于公路里程桩定位的方法,所述方法具体包括:
24、接收车载摄像机获取行车视角下的路域环境图像;
25、当检测到所述路域环境图像中包含公路里程桩时,车载主机从车载定位设备获取车辆当前实时经纬度数据和车头朝向的方位角;
26、根据包含公路里程桩的路域环境图像、所述车辆当前实时经纬度数据和车头朝向的方位角,计算所述公路里程桩的经纬度数据。
27、优选的,所述根据包含公路里程桩的路域环境图像、所述车辆当前实时经纬度数据和车头朝向的方位角,计算公路里程桩的经纬度数据具体包括:
28、从所述路域环境图像中选取画面底部边缘中点作为参考点p1,计算选取的所述参考点p1的经纬度数据;
29、计算公路里程桩p2点相对于所述参考点p1的位置偏移,所述位置偏移包括公路里程桩p2相对于参考点p1的偏移角度与偏移距离;
30、根据所述位置偏移和参考点p1的经纬度数据和所述车头朝向的方位角,计算得到所述公路里程桩的经纬度数据。
31、优选的,所述计算选取的所述参考点p1的经纬度数据具体包括:
32、获取预先测量的车载定位设备与所述参考点p1的距离d01;
33、根据所述车载定位设备p0的经纬度数据、所述车头朝向的方位角、所述距离d01,通过公式(3)计算得到所述参考点p1的经纬度数据:
34、
35、其中,以为位置点p0的纬度和经度,(θp0,d01)为移动时车头的方位角与距离,为参考点p1的纬度与经度,δ为d/r,其中r为地球半径,d的取值为所述距离d01。
36、优选的,所述计算公路里程桩p2点相对于参考点p1的位置偏移具体包括:
37、通过透视变换矩阵,将参考点p1和公路里程桩位置点p2的坐标分别转换为正视地面画面的坐标;
38、根据转换后的坐标计算公路里程桩位置p2相对于参考点p1实际位置的偏移角度与偏移距离。
39、优选的,所述根据所述位置偏移和参考点p1的经纬度数据和所述车头朝向的方位角,计算得到所述公路里程桩的经纬度数据具体包括:
40、采用公式(4),计算公路里程桩p2的经纬度数据:
41、
42、其中,为参考点p1的纬度与经度,为位置点p2的纬度与经度,(θ,d)为从参考点p1移动到公路里程桩p2的方位角与距离,δ为d/r,其中r为地球半径,d的取值为所述偏移距离,θ的取值为所述偏移角度和所述车头朝向的方位角之和。
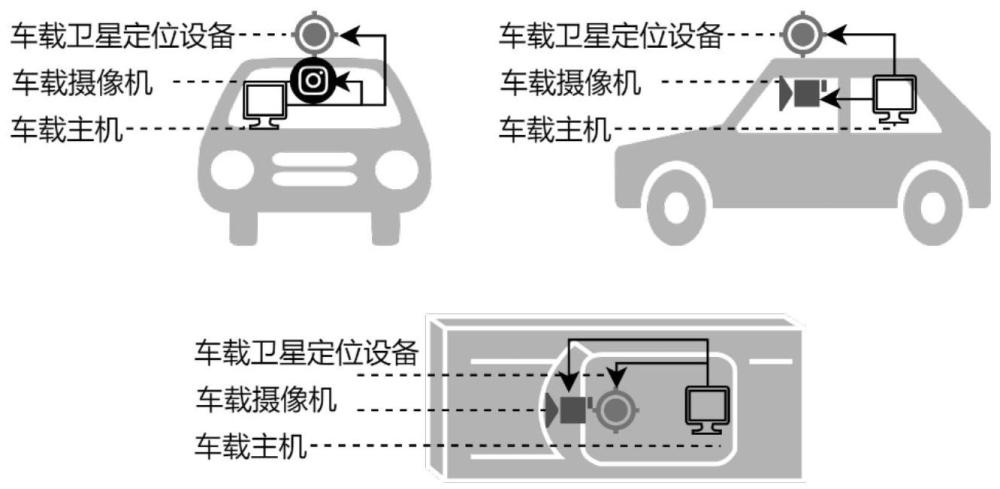
43、第三方面,本技术实施例还提供了一种用于公路里程桩定位的系统,所述系统包括:
44、车载摄像机,用于拍摄路域环境图像并发送给车载主机;
45、车载定位设备,用于实时获取车辆经纬度数据和方位角;
46、车载主机,用于当在所述路域环境图像中检测到公路里程桩时,从所述车载定位设备获取车辆当前经纬度数据和车头朝向的方位角,根据包含公路里程桩的路域环境图像、所述车辆当前经纬度数据和车头朝向的方位角,计算所述公路里程桩的经纬度数据。
47、本技术依据车载摄像机获取的路域图像,并结合卫星定位设备获取的车辆实时经纬度与方位角数据,由车载主机结合事先标定的数据,综合计算得到公路里程桩的经纬度数据。本技术无需使用双目立体视觉,即可快速准确地采集公路里程桩的经纬度数据。
技术实现思路
- 还没有人留言评论。精彩留言会获得点赞!