基于无人机与改进YOLOv8目标检测算法的火灾巡检预警方法与流程
本发明涉及火灾预警,尤其涉及一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法。
背景技术:
1、在火灾巡检领域,利用无人机进行实时检测和预警已逐渐成为一种有效的方法,由于它能快速覆盖大面积并提供实时影像。然而,当面对低分辨率和光通量密度差异显著的遥感视角,当前的无人机搭载的常规目标检测算法在火灾场景中,尤其是对小尺度的火焰和烟雾目标,以及在各种遮挡情况下,往往难以准确和及时地进行检测。这限制了无人机在火灾预警和巡检中的最大效用;
2、火灾预警和巡检系统是社会基础设施的重要组成部分,关乎公共安全和资源保护。传统上,火灾预警主要依赖于固定安装的烟雾探测器、温度传感器以及卫星遥感技术。
3、卫星遥感技术:卫星遥感技术能够覆盖广大区域,尤其对于森林、农田等开放区域的火灾有一定的检测能力。但这种方法的反应速度受到卫星过境周期的制约,且其分辨率可能不足以捕捉小规模的火源。
4、传统的烟雾探测器与温度传感器:它们虽然在室内环境中表现良好,但在开放的自然环境中,它们的部署和维护成本高,覆盖范围受限。
5、近年来,无人机技术在诸多领域得到了广泛的应用,其中火灾巡检与预警是一重要方向。其主要优势在于无人机能够迅速覆盖广大区域,为实时火灾检测提供高分辨率的视频流。此外,利用深度学习的目标检测技术,可以在视频流中准确地检测出火灾的迹象。
6、然而,将无人机视频流应用于火灾检测并非易事。传统的目标检测算法如fasterr-cnn、ssd等,虽然在一般的目标检测任务中表现优异,但面对火灾这样的特殊场景,尤其是在低分辨率、高光通量密度差异的遥感视角下,它们可能无法准确、实时地检测到火焰和烟雾目标。
7、yolo(you only look once)系列算法作为实时目标检测的代表,在某些版本中具有较好的轻量性和实时性,但同样面临上述挑战。尤其是当火焰和烟雾目标的尺度小、存在遮挡或在复杂的背景中时,传统的yolo模型可能失效或响应不及时;
8、上述技术存在以下问题:
9、1、低分辨率和小尺度问题: 在高空巡查,无人机实地获取的早期火灾图像中的火灾特征变得非常小并可能会变得模糊。这种情况下,传统的目标检测算法可能在检测小尺度的火焰和烟雾上遇到困难。另外,火灾现场的光通量密度,特别是火焰和烟雾的,可能会出现明显的差异。在烟雾笼罩或火焰的强烈光照下,火源和背景之间的区别可能会变得模糊,这进一步增加了传统目标检测算法识别火灾特征的困难。现有的方法cn116206223a、cn114037910a、cn116229296a中虽然实现了无人机视角的火灾检测,但仍存在以下缺点:
10、尽管这些方法都使用了深度学习技术,并结合了无人机的实时图像采集功能,但它们主要依赖于现有的yolo系列算法(如yolov3和yolox)。这些算法可能没有针对火灾场景中特有的问题(如小尺度火焰、光通量密度差异)进行优化。
11、这些专利没有明确提及如何解决高空低分辨率下的火焰检测问题,以及如何在复杂光照条件下识别火源
12、2、遮挡问题:在火灾检测的实际应用场景中,尤其是无人机对于大范围地区的巡查,火焰和烟雾的遮挡问题是一个经常被忽视的挑战。具体地,由于火灾的发生地点可能是在森林、城市或其他复杂的环境中,火焰和烟雾经常被建筑、树木、电线等障碍物所遮挡。这样的遮挡会大大降低传统火灾检测算法的准确性,导致火灾在早期阶段被遗漏,从而错失最佳的救援时机。
13、从现有的专利中cn116503702a、cn113112510b、cn116071673a中我们可以看出:
14、基于深度学习的森林火灾检测方法(cn116503702a)强调了数据增强和速度优化,但并未明确提及如何处理遮挡情况。
15、语义分割的森林火灾检测方法(cn113112510b)主要侧重于对遥感图像的语义分割处理,但对于实际的遮挡情况并没有明确的解决方案。
16、基于无人机航拍图像的早期森林火灾检测方法(cn116071673a)对图像质量和早期火灾的识别进行了优化,尽管引入了注意力机制来减少复杂背景的干扰,但对于实际遮挡情况的处理并不明确。
17、3、无人机与地面设备协同性问题:在现代的森林火灾防控中,无人机的作用日益凸显,其高效的数据采集和实时监控功能,为火灾的早期发现和及时处置提供了有力支撑。但伴随其应用,一些关键的技术难题也随之浮现,尤其是无人机与地面设备之间的协同性问题。
18、尽管专利cn116206223a、cn111508181a、cn101650866中提出了各自的火灾检测方案,但这些方案在无人机与地面设备协同性上仍有明显不足。例如,专利(cn116206223a)中,虽然采用了边缘计算进行火灾检测,但其方法对于数据的传输和处理过程中的协同性并未进行明确描述,可能会导致火灾数据处理延迟,从而错过及时应对火灾的黄金时间。专利(cn111508181a)虽然提到了地面站与无人机的互动,但更多的是在火灾确认上,对于火灾的实时监控和预警系统则未进行深入考虑。而专利(cn101650866)更是聚焦在无人机上的火灾检测技术,对于与地面设备的协同工作几乎未涉及。
19、这些专利背后所反映的问题,实际上是现今大多数无人机火灾检测系统所面临的:即便能够在无人机上进行实时监测,但如何迅速、准确地传输这些关键信息至地面设备,并确保地面设备能够高效处理和响应这些信息,仍是一个巨大的挑战。
20、因此,现有技术在火灾巡检和实时预警方面存在一些问题和局限,主要表现在分辨率低、光通量差异大、遮挡情况复杂、实时性要求高以及无人机与地面协同不足。这为新的技术创新提供了机会。
21、为此,我们设计一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法,用于对上述技术问题提供另一种技术方案。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法,用于解决上述背景技术中提出的技术问题。
2、为了解决上述的技术问题,本发明采用了如下技术方案:
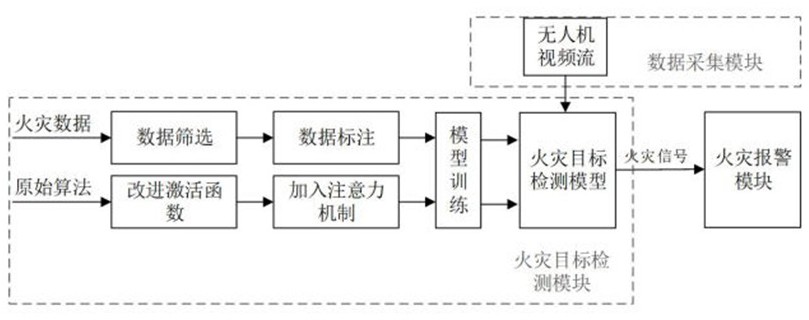
3、一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法,步骤如下:
4、s1:对火灾数据进行收集、筛选和标注;
5、s2:对原始算法进行改进并训练;
6、s3:将火灾数据输入至s2步骤改进后的原始目标检测算法进行训练;
7、s4:将训练好的模型部署至英伟达开发板;
8、s5:对无人机的实时视频流进行检测;
9、s6:检测到火灾信号,火灾报警模块发出预警。
10、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,所述s1步骤中,对火灾数据进行收集、筛选和标注,步骤如下:
11、构建火灾图像数据集;
12、对数据进行筛选,删除掉低质量的数据;
13、对筛选后的数据集中火焰图像数据,采用labelimg软件对数据集进行标注。
14、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,所述s3步骤中,将火灾数据输入至原始目标检测算法进行训练,步骤如下:
15、将火灾图像数据集输入至改进yolov8目标检测算法进行训练。
16、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,将数据集中971张火焰图像数据,分为训练集和测试集;
17、训练集包含711张图像,一共有1530个标注框;
18、测试集包含260张图像,一共有587个标注框。
19、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,所述s2步骤中,对原始算法进行改进并训练,步骤如下:
20、对yolov8目标检测算法中backbone的浅层采用全维动态卷积;
21、在backbone和head中采用协调注意力机制,将通道注意力分解为并行的一维特征编码,并有效的将空间坐标信息整合到注意力中。
22、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,全维动态卷积引入了多维注意力机制,以并行的方式沿着核空间的4个维度计算四种注意力机制,表达式如下:
23、当输入为,输出为时,全维动态卷积可用公式(1)表示:
24、
25、其中,,为乘法运算,为卷积运算,为加权卷积核的注意力标量,、、分别为加权卷积核的输出通道注意力标量、输入通道注意力标量和核空间注意力标量。
26、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,协调注意力利用两个一维全局池化操作,分别沿垂直和水平方向对输入特征进行融合,产生两个独立的特征图,两个特征图分别嵌入特定方向的信息;
27、不同特定方向信息嵌入的特征图被分别编码成两个注意力特征;
28、通过sigmoid函数进行融合。
29、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,所述s4步骤中,开发板搭载ubuntu操作系统,采用darknet环境进行编译。
30、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,所述s6步骤中,检测到火灾信号,火灾报警模块发出预警,步骤如下:
31、报警模块将实时监测火灾目标检测模块的火灾信号;
32、当监测到来自火灾目标检测模块的的火灾信号时,报警模块被触发,将会通过短信和蜂鸣器的方式发出报警信号。
33、作为本发明提供的所述的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法的一种优选实施方式,所述报警模块由stm32单片机、led指示灯、蜂鸣器和sim900a模块组成;
34、stm32单片机作为报警模块的主控芯片;
35、led指示灯和蜂鸣器由stm32单片机的gpio口直接控制;
36、sim900a模块通过串口用stm32单片机控制其发送短信。
37、可以毫无疑义的看出,通过本技术的上述的技术方案,必然可以解决本技术要解决的技术问题。
38、同时,通过以上技术方案,本发明至少具备以下有益效果:
39、本发明提供的一种基于无人机与改进yolov8目标检测算法的火灾巡检预警方法,通过引入全维动态卷积(odconv)技术,改进了目标检测算法,使其能够更准确地检测小尺度的火灾目标;这意味着即使在高空、低分辨率和光通量密度差异显著的条件下,也能捕捉到火灾特征,提高了检测的精度;
40、通过引入了通道-协调注意力(channel-cooratt)机制,该机制强化了目标检测模型对兴趣区域的感知能力;这意味着即使火焰和烟雾被树木、建筑物或其他障碍物遮挡,模型仍能准确地检测出火灾,增强了检测的鲁棒性;
41、通过提供了高效的目标检测算法,还结合了无人机与地面设备,建立了实时火灾巡检及报警系统;通过深度学习的目标检测算法,能够实时传输无人机机载摄像头捕获的视频流至地面设备,实时检测火情;一旦火情被检测到,报警模块会立即触发,通过多种方式(短信、led指示灯、蜂鸣器)发出报警信号,通知管理员进行相应处理,确保了火灾的实时预警和快速响应;
42、通过提高了火灾目标检测的精度和鲁棒性,同时建立了实时火灾巡检及报警系统,实现了无人机与地面设备的高效协同,从而提供了更高效、准确和实时的火灾预警和巡检解决方案,解决了传统技术中存在的问题和缺点。
- 还没有人留言评论。精彩留言会获得点赞!