一种基于隧道几何特征的复杂形态隧道点云滤波方法、设备及存储介质
本发明属于隧道点云数据处理,涉及一种基于隧道几何特征的复杂形态隧道点云滤波方法、设备及存储介质。
背景技术:
1、三维激光扫描技术(激光雷达技术)具有扫描技术速度快、扫描精度高、非接触式且不受扫描环境影响等特点,使其在隧道监控量测与监测预警方面具有广泛的应用。由于利用激光雷达技术获取的海量隧道点云不可避免地具有大量非隧道轮廓点,即干扰点,严重影响其在隧道工程领域的应用,故在将其进一步应用前,需先对隧道点云进行滤波,即将隧道点云的轮廓点云与非轮廓点云进行区分。但隧道点云滤波涉及到海量点的计算,且滤波精度对隧道点云的进一步应用具有极大的影响,隧道点云的高精度滤波是其在隧道工程领域应用的前提与基础。
2、已有的隧道点云滤波方法主要针对圆形或椭圆形断面隧道,利用二次曲线方程,如圆方程、椭圆方程等,对隧道分段点云投影后的平面点云进行拟合,并依据平面点云至拟合中心的距离判断其是否为噪声点,从而实现其滤波。然而,这类方法仅适用于截面为圆形或椭圆形的隧道,对于半圆拱、三心拱以及非规则断面隧道点云滤波时则具有较大的局限性。
3、近年来,机器学习在地下工程领域具有广泛的应用,但该方法需要预先准备全面的训练样本,同时训练样本也要覆盖隧道的所有形态特征,这对非规则断面隧道点云,要达到高精度的滤波效果具有较大的难度。
技术实现思路
1、为了解决上述问题,本发明提供一种基于隧道几何特征的复杂形态隧道点云滤波方法、设备及存储介质,实现了非规则断面隧道轮廓点云的识别,提高了隧道点云滤波精度,解决了已有隧道点云滤波方法无法有效地进行非规则形态隧道点云滤波的局限性问题。
2、本发明所采用的技术方案是,一种基于隧道几何特征的复杂形态隧道点云滤波方法,包括:
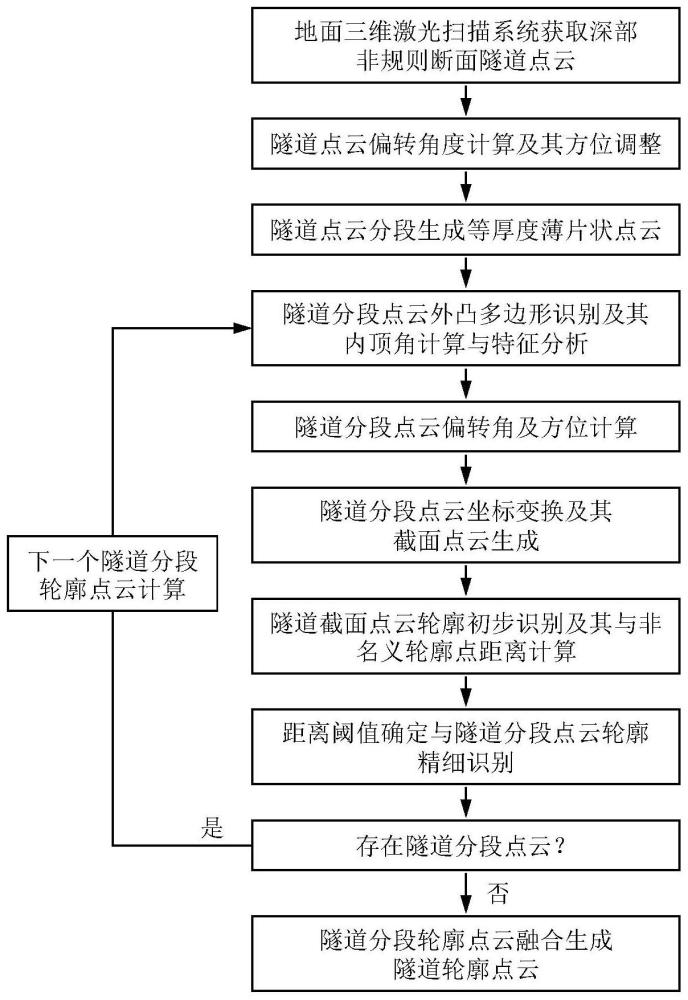
3、通过隧道整体点云偏斜修正,使隧道点云的整体延伸方向与全局坐标系y轴方向保持一致;将隧道原始点云沿全局坐标系y轴方向等厚度地分割成隧道分段点云,通过分段点云偏转角及方位的修正,生成对应的截面点云;通过凸包算法初步识别隧道截面点云轮廓,依次计算非名义轮廓点至隧道截面名义轮廓的距离;通过比较非名义轮廓点至隧道截面名义轮廓的距离与距离阈值的相对大小,对隧道截面点云的非名义轮廓点进行二次筛分,从而实现隧道截面点云轮廓的识别;依次对隧道各分段点云进行滤波,通过隧道分段轮廓点云的融合最终实现非规则断面隧道轮廓点云的识别。
4、进一步的,具体包括以下步骤:
5、s1,通过地面三维激光扫描系统获取深部非规则断面隧道的原始点云;
6、s2,依据地面三维激光扫描系统获取的点云特点,将隧道点云投影至xoy平面,x为隧道横向,y表示隧道纵向,计算隧道点云与全局坐标系y轴的夹角;对隧道点云进行旋转变换,使隧道点云的整体延伸方向与全局坐标系的y轴方向保持一致;
7、s3,沿全局坐标系的y轴方向,将隧道点云等厚度地分割为若干厚度为t的薄片状的隧道分段点云ti;
8、s4,通过二维凸包算法计算隧道分段点云ti在xoy平面内所有投影点的外凸多边形及顶点;
9、s5,依据转角对应的角度最小的特征,识别隧道分段点云在xoy平面内投影点的外凸多边形的四个拐角点,通过计算两侧短边线段与y轴的夹角计算平均偏转角,再计算对应方位;
10、s6,依据隧道分段点云偏转角θi及方位,对隧道分段点云ti进行坐标的旋转修正,使得隧道分段点云方位与全局坐标系的y轴保持一致,将坐标变换后的隧道分段点云沿全局坐标系的y轴投影,得到隧道分段点云ti对应于xoz平面内的隧道截面点云ti′;
11、s7,将二维凸包算法计算隧道截面点云ti′对应的外凸多边形定义为隧道名义轮廓点,隧道截面点云ti′的其余点则视为非名义轮廓点;计算隧道截面点云内每个非名义轮廓点至隧道名义轮廓点的距离;
12、s8,通过比较非名义轮廓点至隧道截面名义轮廓的距离与距离阈值dthreshold的相对大小,对隧道截面点云的非名义轮廓点进行二次筛分,从而实现隧道截面点云轮廓的识别;
13、s9,依次对隧道各分段点云进行滤波,并分别将隧道各个分段点云的轮廓点云与非轮廓点云分别进行融合,得到隧道的轮廓点云与非轮廓点云,从而实现非规则断面隧道点云的滤波。
14、进一步的,所述s2中,以隧道延伸方向两端断面中点的连线为参考,计算两个断面中点的连线与全局坐标系y轴的夹角,依据式(1)对隧道点云进行旋转变换:
15、
16、式中,α为隧道点云与全局坐标系y轴的夹角,(x,y,z)为坐标变换前的隧道点云坐标,而(xnew,ynew,znew)为坐标变换后的隧道点云坐标。
17、进一步的,所述s4中,按式(2)计算点pj的角度,由此计算出所有顶点的角度;
18、
19、pj为xoy平面内所有投影点的外凸多边形的顶点,以逆时针次序排序,pj的前一点为pj-1,pj的后一点为pj+1。
20、进一步的,所述s5中,隧道分段投影点云对应的拐角点位于四个角,依据四个拐角点在x-y坐标下坐标分量的相对大小,分别进行编号,以左下角顶点为起点,按逆时针方向将四个拐角点分别记为pi1、pi2、pi3、pi4,按式(3)、式(4)分别计算隧道分段投影点云左、右两侧短边与全局坐标系y轴的偏转角θil、θir;
21、
22、
23、
24、按照式(5)计算隧道分段点云ti与全局坐标系y轴的平均偏转角θi。
25、进一步的,所述s7中,隧道截面非名义轮廓点mi至隧道名义轮廓的距离的计算步骤:
26、首先,按点至线段距离的计算方法,计算隧道非名义轮廓点mi至组成隧道名义轮廓的线段lj的距离dij;
27、然后,依次计算隧道截面非名义轮廓点mi至组成隧道名义轮廓线段lj+1的距离dij+1,j=1,2,3,…;
28、最后,依据计算的隧道截面非名义轮廓点mi至隧道名义轮廓的所有组成线段距离dij,最小值即为隧道截面非名义轮廓点mi至隧道名义轮廓的距离di,
29、即di=min{dij,j=1,2,3,…}。
30、进一步的,所述点至线段距离的计算方法分为以下三种情形:
31、1)若点与线段的垂线和线段所在直线的交点位于线段上,则点至直线的距离即为点至线段的距离;
32、2)若交点位于线段的一侧,则点与线段该侧端点的距离即为点至线段的距离;
33、3)若交点位于线段的另一侧,则点与线段该侧端点的距离即为点至线段的距离。
34、进一步的,所述s8中,通过隧道点云轮廓与隧道内部不同附属设施的实际距离综合确定隧道截面非名义轮廓点至隧道截面名义轮廓的距离阈值dthreshold,距离di≤dthreshold判定为轮廓点,而di﹥dthreshold判定为非轮廓点。
35、一种基于隧道几何特征的复杂形态隧道点云滤波设备,包括:
36、存储器,用于存储可由处理器执行的指令;以及
37、处理器,用于执行所述指令以实现上述基于隧道几何特征的复杂形态隧道点云滤波方法。
38、一种存储有计算机程序代码的计算机可读介质,所述计算机程序代码在由处理器执行时实现上述基于隧道几何特征的复杂形态隧道点云滤波方法。
39、本发明的有益效果是:
40、本发明基于隧道几何特征的复杂形态隧道点云滤波方法,基于非规则断面隧道点云外部轮廓的几何特征,通过隧道分段点云投影的外凸多边形识别及其内顶角计算与特征分析,计算隧道分段点云偏转角及方位,并对隧道分段点云的偏斜角及方位进行修正,得到非规则断面隧道分段点云对应的隧道截面点云,有效地提高了隧道分段点云生成截面点云的准确度。基于隧道截面点云的轮廓特征,利用二维凸包算法识别围绕隧道截面所有点的外凸多边形,进行隧道截面轮廓点的初步识别,建立隧道截面非名义轮廓点与隧道名义轮廓的距离计算方法并依次计算隧道截面非名义轮廓点云的距离,再通过确定的距离阈值对隧道轮廓进行精细识别,实现了非规则断面隧道分段点云的滤波。最后,通过依次计算隧道点云的轮廓点云,再对隧道分段点云进行融合得到隧道整体轮廓点云。
41、本发明涉及的非规则断面隧道点云滤波方法突破了已有的隧道点云滤波方法仅适用于圆形、椭圆形等规则断面的局限性,提高了非规则断面隧道点云滤波的计算精度与运算效率。
- 还没有人留言评论。精彩留言会获得点赞!