面向传感器数据异常的旋转机械智能故障诊断方法及系统
本发明涉及机械故障诊断,特别是涉及一种面向传感器数据异常的旋转机械智能故障诊断方法及系统。
背景技术:
1、旋转机械作为机械系统中的一个重要组成部分,在航空航天、交通运输和制造业等许多领域都有广泛应用。为了监测旋转机械的连续运行状态和健康状态,通常采用多种传感器采集监测信号。但是,与理想状态下采集的信号相比,在实际环境中采集监测数据往往面临传感器故障、机械冲击、电气干扰等恶劣工业环境,这导致了实际采集的旋转机械振动信号往往包含大量的非故障异常数据。此外,由于被监测旋转机械的强烈振动、传动故障或其他意外的传感器故障,信号采集过程可能突然中断,这可能导致振动传感器信号的暂时丢失。以上故障都会导致数据的异常,这些数据被称为非故障异常数据,这些数据为旋转机械的状态监测和故障诊断带来困难,降低诊断结果的可信度。提高传感器数据异常与缺失条件下的智能故障诊断性能一直是旋转机械动态监测、诊断与维护领域的重点。因此,开发在传感器数据异常与缺失条件下的旋转机械状态智能监测、诊断方法与技术,具有重要的理论意义和工程应用价值。
2、传统的解决非故障异常数据问题的技术是对传感器数据进行验证,该技术会对传感器的数据质量进行评估和验证,具有较好的诊断结果解释能力。但是该技术在处理较为复杂的数据集(如振动信号)时的适应性相当有限。随着人工智能的发展,发展出基于神经网络的数据验证方法。在传感器数据异常的情况下,该方法的目的是增加数据的多样性。但是传统的数据补全方法如主成分分析、矩阵补全和聚类等均被证明存在适应性有限的缺点。之后发展的基于生成对抗补全网络的数据补全方法被证明是更有效的,该方法可以根据已知数据点进行数据预测和填补,但是目前的数据增强办法主要侧重于拓展数据集的大小,尽管可以一定程度上缓解了采样不足的难题,但忽略了信号缺失情况下的欠采样挑战,这将会使数据多样性不足,使得预测生成对抗网络在涉及复杂模式和微小差异的情况下的性能下降。
3、因此,亟需一种能够在传感器数据缺失和异常情况下对传感器数据进行预测和补全的旋转机械智能诊断方法,以实现在传感器数据缺失和异常情况下的旋转机械状态监测和故障诊断。
技术实现思路
1、为解决现有技术存在的上述问题,本发明提供了一种面向传感器数据异常的旋转机械智能故障诊断方法及系统。
2、为实现上述目的,本发明提供了如下方案。
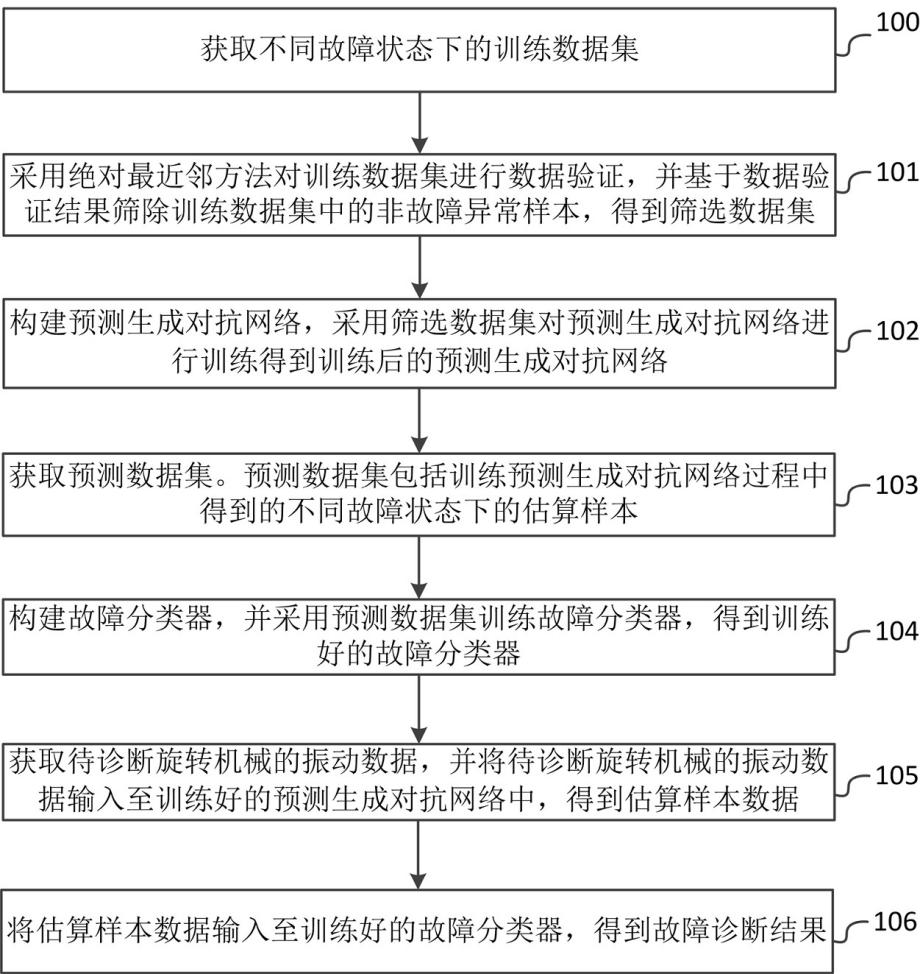
3、一种面向传感器数据异常的旋转机械智能故障诊断方法,包括:获取不同故障状态下的训练数据集;所述训练数据集包括旋转机械在不同故障状态下的振动数据。
4、采用绝对最近邻方法对所述训练数据集进行数据验证,并基于数据验证结果筛除所述训练数据集中的非故障异常样本,得到筛选数据集。
5、构建预测生成对抗网络,采用筛选数据集对所述预测生成对抗网络进行训练得到训练后的预测生成对抗网络;所述预测生成对抗网络为包括范数正则化损失函数的生成对抗网络;训练后的预测生成对抗网络以振动数据为输入,以估算样本为输出。
6、获取预测数据集;所述预测数据集包括训练预测生成对抗网络过程中得到的不同故障状态下的估算样本。
7、构建故障分类器,并采用所述预测数据集训练所述故障分类器,得到训练好的故障分类器。
8、获取待诊断旋转机械的振动数据,并将待诊断旋转机械的振动数据输入至训练好的预测生成对抗网络中,得到估算样本数据。
9、将所述估算样本数据输入至训练好的故障分类器,得到故障诊断结果。
10、可选地,采用绝对最近邻方法对所述训练数据集进行数据验证,并基于数据验证结果筛除所述训练数据集中的非故障异常样本,得到筛选数据集,具体包括:基于所述训练数据集中的样本数据确定类指标;所述类指标为所述样本数据中样本最大值和样本最小值间差值的绝对值。
11、构建所述类指标的识别索引,并对所述类指标进行排序得到指标排序结果。
12、获取识别参数,基于所述识别参数得到所述指标排序结果中的非故障异常样本。
13、将所述训练数据集中的所述非故障异常样本筛除,得到所述筛选数据集。
14、可选地,构建预测生成对抗网络,采用筛选数据集对所述预测生成对抗网络进行训练得到训练后的预测生成对抗网络,具体包括:
15、构建第一生成器,并将输入参数输入至所述第一生成器得到生成样本;所述输入参数包括随机噪声、时间窗口和类向量。
16、构建鉴别器,并将所述生成样本和所述筛选数据集输入至所述鉴别器得到鉴别结果。
17、确定第一生成器的损失函数和鉴别器的损失函数,并基于所述第一生成器的损失函数和所述鉴别器的损失函数确定预测生成对抗网络的损失函数。
18、引入范数正则化,基于预测生成对抗网络的损失函数构建训练目标。
19、将所述第一生成器的参数和所述鉴别器的参数作为预测生成对抗网络的初始参数。
20、基于所述训练目标对预测生成对抗网络的初始参数进行优化,直至预测生成对抗网络达到纳什平衡。
21、将达到纳什平衡时第一生成器的输入参数输入至第二生成器中,得到预测样本。
22、融合所述预测样本和所述筛选数据集中的样本得到估算样本。
23、可选地,达到纳什平衡时第一生成器所生成的样本的数据分布满足的条件为:。
24、式中,表示筛选数据集中样本的数据分布,则表示第一生成器中预测样本的数据分布,表示训练的次数,表示极限函数,表示趋近于。
25、可选地,所述训练目标为:。
26、式中,表示预测生成对抗网络的损失函数,表示对惩罚参数进行控制的一个参数,表示预测生成对抗网络的层数,表示范数正则化的过程,,表示第层,表示第个权重的平方和,表示第层对应的范数正则化的过程,表示预测生成对抗网络的权重,表示权重的范数正则化结果,表示更新后的损失函数。
27、可选地,所述第一生成器的损失函数为:。
28、式中,表示第一生成器的损失函数,表示样本的数量,表示第i个预测样本,表示筛选数据集中的第i个样本。
29、所述鉴别器的损失函数为:。
30、式中,表示鉴别器的损失函数,表示输入鉴别器的第个样本,表示第个样本对应的标签,表示鉴别器基于类向量对输入鉴别器的第个样本的预测结果,表示对数函数。
31、所述预测生成对抗网络的损失函数为:;表示预测生成对抗网络的损失函数。
32、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明引入绝对最近邻方法来验证训练数据集中的非故障异常样本并筛除这类样本数据,能够有效降低非故障异常数据对故障诊断的影响;将范数正则化集成到预测生成对抗网络的损失函数中,能够对非故障异常样本分布进行充分学习,以在数据缺失和异常情况下对数据进行预测和补全,进而实现在传感器数据缺失和异常情况下的旋转机械状态监测和故障诊断。同时,在损失函数中融入范数正则化,还可以提高预测生成对抗网络的鲁棒性。
33、进一步,本发明提供了一种面向传感器数据异常的旋转机械智能故障诊断系统,所述系统用于实施上述提供的面向传感器数据异常的旋转机械智能故障诊断方法;所述系统包括:训练数据集获取模块、数据验证筛选模块、网络构建训练模块、预测数据集获取模块、分类器构建训练模块、估算样本生成模块和故障诊断模块。
34、训练数据集获取模块,用于获取不同故障状态下的训练数据集;所述训练数据集包括旋转机械在不同故障状态下的振动数据。
35、数据验证筛选模块,用于采用绝对最近邻方法对所述训练数据集进行数据验证,并基于数据验证结果筛除所述训练数据集中的非故障异常样本,得到筛选数据集。
36、网络构建训练模块,用于构建预测生成对抗网络,采用筛选数据集对所述预测生成对抗网络进行训练得到训练后的预测生成对抗网络;所述预测生成对抗网络为包括范数正则化损失函数的生成对抗网络;训练后的预测生成对抗网络以振动数据为输入,以估算样本为输出。
37、预测数据集获取模块,用于获取预测数据集;所述预测数据集包括训练预测生成对抗网络过程中得到的不同故障状态下的估算样本。
38、分类器构建训练模块,用于构建故障分类器,并采用所述预测数据集训练所述故障分类器,得到训练好的故障分类器。
39、估算样本生成模块,用于获取待诊断旋转机械的振动数据,并将待诊断旋转机械的振动数据输入至训练好的预测生成对抗网络中,得到估算样本数据。
40、故障诊断模块,用于将所述估算样本数据输入至训练好的故障分类器,得到故障诊断结果。
41、因本发明提供的上述系统实现的技术效果与本发明提供的面向传感器数据异常的旋转机械智能故障诊断方法实现的技术效果相同,故在此不再进行赘述。
- 还没有人留言评论。精彩留言会获得点赞!